(54) АГРЕГАТ ДЛЯ ОБРАЗОВАНИЯ В ПОЧВЕ УГЛУБЛЕНИЙ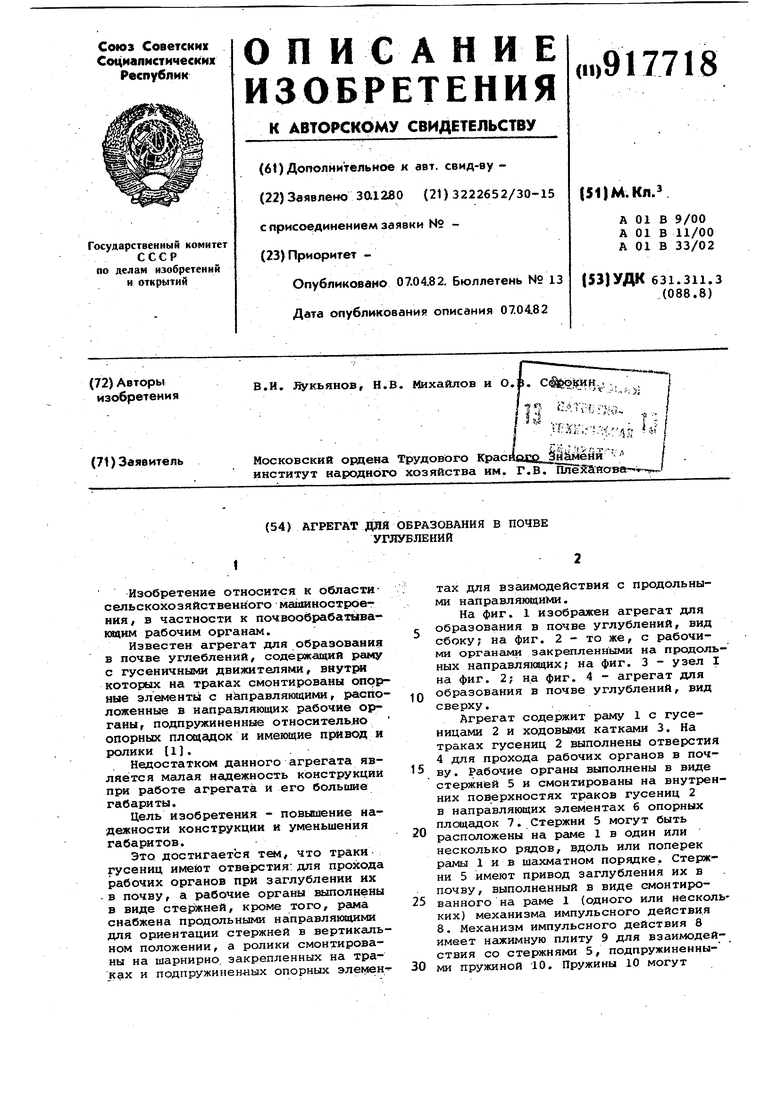

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАБОТКИ ПОЧВЫ И ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2561214C1 |
| Способ обработки, аэрации и удобрения почвы и устройство для его осуществления | 2015 |
|
RU2608728C2 |
| Щелерезное орудие Н.А.Оноприенко | 1990 |
|
SU1727585A1 |
| Почвообрабатывающее орудие | 1980 |
|
SU917717A1 |
| Механизм заглубления сельскохозяйственного орудия | 1989 |
|
SU1635916A1 |
| ПОЧВОИЗМЕЛЬЧИТЕЛЕПОСАДОЧНЫЙ АГРЕГАТ И.Г.МУХИНА | 1997 |
|
RU2121251C1 |
| РЫХЛИТЕЛЬ МЕЛИОРАТИВНЫЙ | 1997 |
|
RU2113076C1 |
| ПОЧВООБРАБАТЫВАЮЩЕЕ ОРУДИЕ | 1992 |
|
RU2048714C1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОЧВЫ | 1993 |
|
RU2064741C1 |
| Вибрационный плоскорез | 2023 |
|
RU2830133C1 |
Изобретение относится к областисельскохозяйственного машиностроения , в частности к почвообрабах11ва кнцнм рабочим органам.
Известен агрегат для образования в почве углеблений, содержащий раму с гусеничными движителями, которых на траках смонтированы опорные элементы с направляющими, расположенные в направляющих рабочие органы, подпружиненные относительно опорных площадок и имеющие привод и ролики 1..
Недостатком данного агрегата является малая надежность конструкции при работе агрегата и его больпме габариты.
Цель изобретения - повьпиение надежности конструкции и уменьшения габаритов.
Это достигается тем, что траки гусениц имеют отверстия: для прохода рабочих органов при заглублении их -в почву, а рабочие органы выполнены в виде стеЕйкней, кроме того, рама снабжена продольными направлякицими для ориентации стержней в вертикальном положении, а ролики смонтированы на шарнирно. закрепленных на траках и подпружиненных опорных элемен- тах для взаимодействия с продольными направляющими.
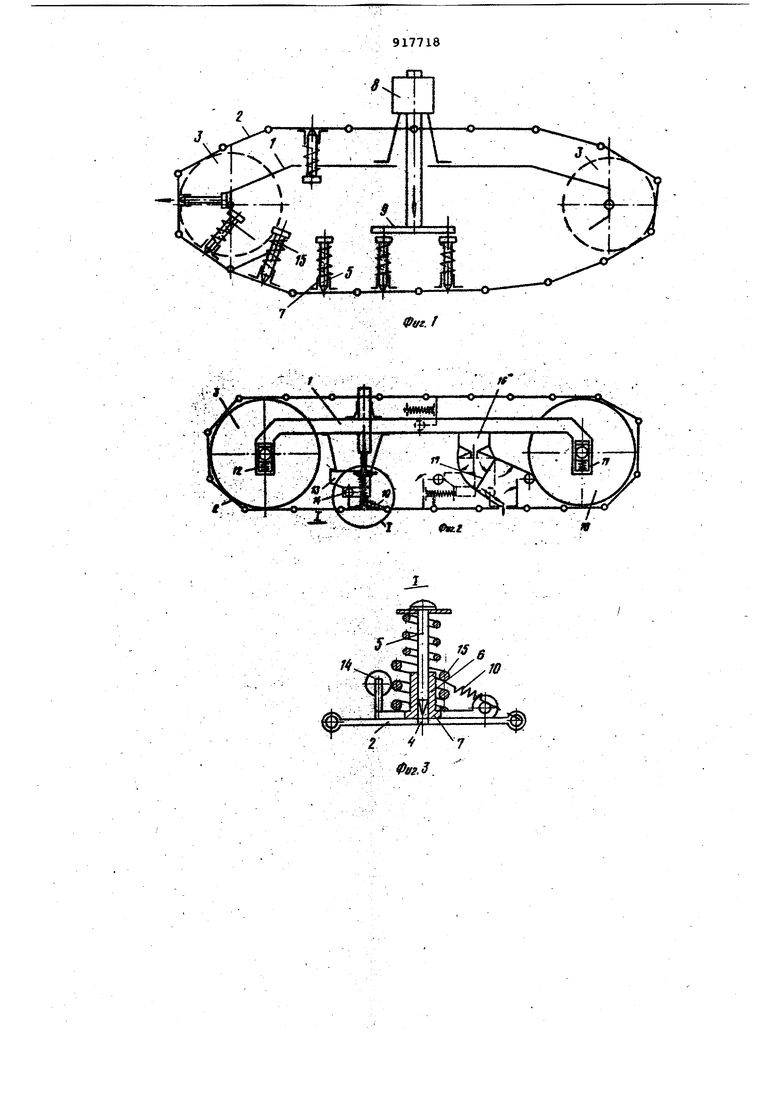
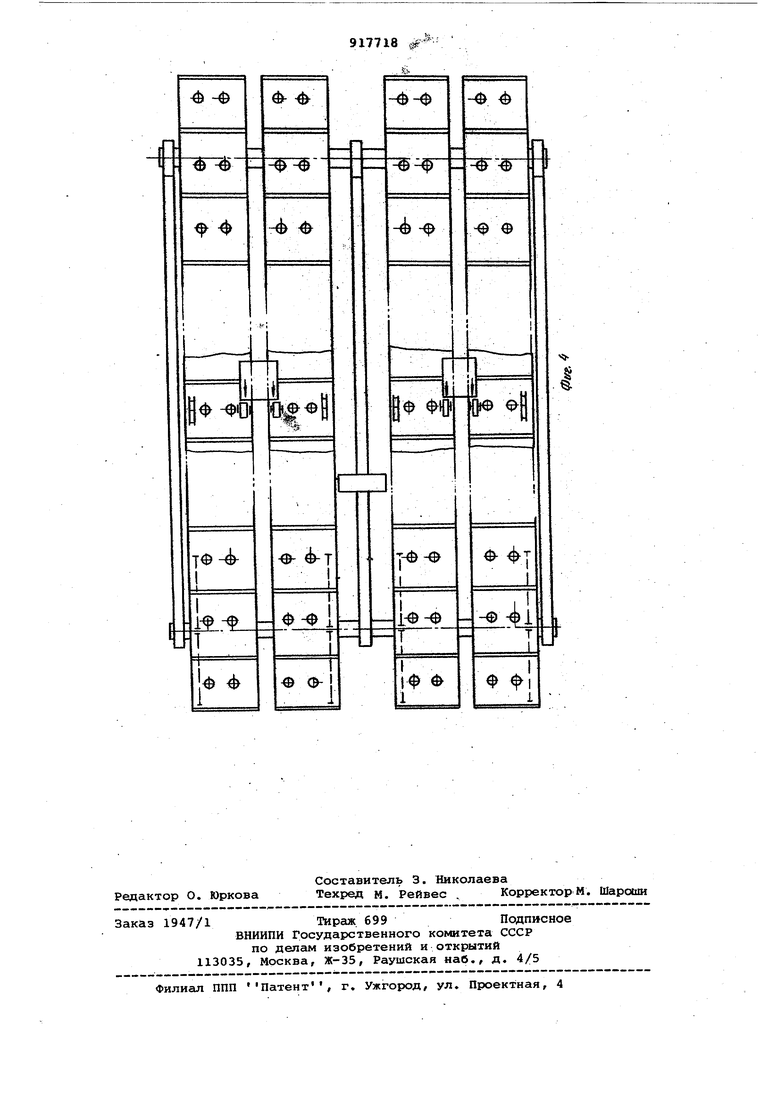
На фиг. 1 изображен агрегат для образования в почве углублений, вид сбоку; на фиг. 2 - то же, с рабочими органами закрепленными на продольных направляющих; на Фиг. 3 - узел I на фиг. 2; н,а фиг. 4 - агрегат для образования в почве углублений, вид
10 сверху.
Агрегат содержит раму 1 с гусеницами 2 и ходовыми катками 3. На траках гусениц 2 выполнены отверстия 4 для прохода рабочих органов в поч15ву. Рабочие органы выполнены в виде стержней 5 и смонтированы на внутренних поверхностях траков гусениц 2 в направляющих элементах 6 опорных площадок 7. Стержни 5 могут быть
20 расположены на раме 1 в один или несколько рядов, вдоль или поперек рамы 1 и в шахматном порядке. Стержни 5 имеют привод заглубления их в почву, выполненный в виде смонтиро25ванного на раме 1 (одного или нескольких) механизма импульсного действия 8. Механизм импульсного действия 8 имеет нажимную плиту 9 для взаимодействия со стержнями 5, подпружиненными пружиной 10. Пружины 10 могут быть выполнены в виде двух пружин, одна из (короткая) обеспечивает начальное, а другая (длинная окончательное извлечение стержней 5 из почвы. В случае выполнения сте мкней 5 поворотными на раме 1, подпружинен ной пружинами 11,12, смонтированы продольные направляющие 13 для ориентации стержней 5 в вертикальном положении. Опорные площадки 7 направляющих элементов 6, в которых размещены стержни 5, имеют ролики 14 для взаимодействия с продольными направля. .ющими 13 и установлены на траках с возможностью углового перемещенияза счет их шарнирного крепления к ,тракам и пружин возврата 15. ; На орудии установлено приспособление для внесения удобрений в сфор мированные отверстия. Приспособленн имеет бункер 16 с управляемыми зад. вижками 17, выполненными поворотными и взаимодействующими с роликами 14, и системы питателей 18. Орудие может быть выполнено как самоходным, так и прицепным к трактору. В последнем случае трактор яв ляется источником энергии для всех узлов орудия. В качестве системы управления ра ботой всех узлов орудия применяются известные электрические. Гидравлические -и пневматические элементы (не показаны). Работа агрегата осуществляется следующим образом. При перемещении агрегата по полю механизм импульсного действи 8 через нажимную плиту 9 воздействует на стержни 5, сообщает им поступательное перемещение вдоль оси и заглубляет стержни 5 в почву, после чего стержни 5 под действием пружин 10 занимают исходное положение. Извлечение стержней 5 из почвы происходит при прижатых к почве опорных плетцадок 7, через их направлякмцие элементы 6, которые предотвращают повреждение формы сформированных отверстий. В случае выполнения рабочих органов - стержней 5 на опорных площадках 7, имеющих возможность углового перемещения в вертикальной пло кости, работа по формированию отвер стий Осуществляется аналогичным образом . Отличительным моментом является нахоящение стержней 5 с опорными плсодадками 7 под действием пружин 10 в нерабочем (откинутом) положении . в рабочее положение стержни 5 переводятся через ролик 14, при этом опорная плсхцадка 7 оказывается плотно прижатой к остановленному в данный момент траку гусениц 2. Рабочий процесс мсйсет проводиться несколькими стержнями 5 как одновременно, -так и поочередно. Операция внесения удобрений осуществляется системой дозирования и подачи удобрений, сблокированной с рабочим органом - стержнем 5. Система питахелей 18 перекривается управляешши задвижками 17, имеющими возможность углового поворота в вертикальной плоскости под действием набегающих на них роликов 14 и обеспечивающими дозированную подачу NfflHeральных удобрений в сфорлмрованные отверстияi Формула изобретения 1. Агрегат для образования в почве углублений, содержащий раму с гусеничньа ш движителями, внутри которых на траках смонтированы опорные элементы с направляющими, расяоложенHbie в напра8лякж(их рабочие органы. подпружиненные относителвно опорных плсщадок я имекщие привод и ролики, отличающийся -х&л, что, с целью повышения надежности конструкции, траки гусениц имеют отверстия для прохода рабочих органов при заглублении их в почву, а рабочие органы выполнены в виде стержней. 2, Агрегат по п. 1, отличаю щ и и с я чем, что, с целью уменьшения габаритов, рама снабжена про- дольнь1ми направляющими для ориентации стержней в вертикальном положеНИИ, а ролики смонтированы на шарнирно закрепленных на траках и подпружиненных опорных элементах для взаимодействия с продольными направляющими.Источники информации, принятые во внимание при экспертизе 1. патейт США № 2509691, кл. 111-89, 1950.
Vi
«:
ч 7
