(54) МОДУЛЬ ПРОМЫШЛЕННОГО РОБОТА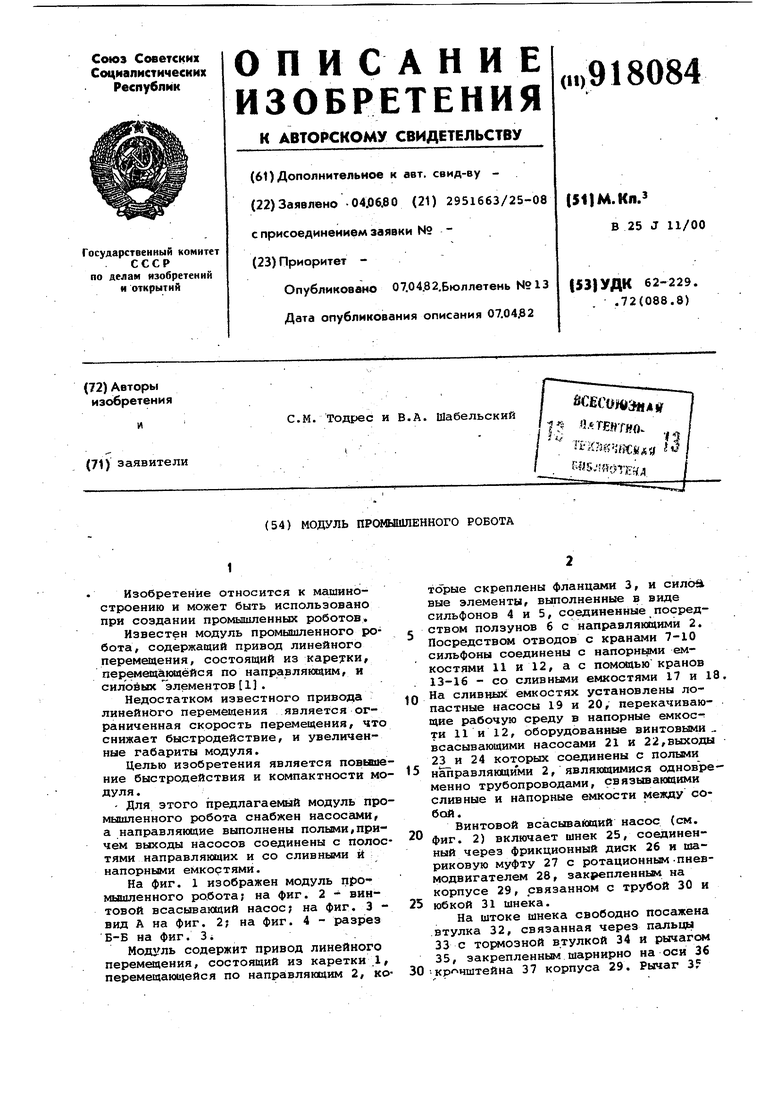
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ НАГРЕВА ЖИДКОСТЕЙ | 2014 |
|
RU2564730C1 |
| Сифонный дозатор | 1990 |
|
SU1774177A1 |
| Система управления пневмопружинными тормозными камерами транспортного средства | 1986 |
|
SU1384444A1 |
| КОМПЛЕКСНЫЙ ГИДРАВЛИЧЕСКИЙ КАНАЛ ВЕРТИКАЛЬНОГО НЕФТЯНОГО ЭЛЕКТРОНАСОСНОГО АГРЕГАТА | 2011 |
|
RU2472044C1 |
| ТОРМОЗНАЯ ГИДРАВЛИЧЕСКАЯ СИСТЕМА ПРИЦЕПНОГО ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2013253C1 |
| Тепловой двигатель | 1987 |
|
SU1462022A1 |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ВНЕСЕНИЯ ЖИДКИХ УДОБРЕНИЙ В ПОЛИВНУЮ ВОДУ | 2012 |
|
RU2496295C1 |
| Гидравлический фрикционный тормоз транспортного средства | 1974 |
|
SU858552A3 |
| Установка для мойки изделий | 1987 |
|
SU1496841A1 |
| КОНСТРУКТИВНЫЙ РЯД ВЕРТИКАЛЬНЫХ НЕФТЯНЫХ ЭЛЕКТРОНАСОСНЫХ АГРЕГАТОВ | 2011 |
|
RU2472039C1 |
Изобретение относится к машиностроению и может быть использовано при создании промышленных роботов.
Известен модуль промышленного робота, содержащий привод линейного перемещения, состоящий из каретки, перемещающейся по направляющим, и силоёых элементов 1 .
Недостатком известного привода линейного перемещения является ограниченная скорость перемещения, что снижает быстродействие, и увеличенные габариты модуля.
Целью изобретения является повьвиение быстродействия и компактности модуля .
- Для этого предлагаемый модуль промышленного робота снабжен насосами, а направляющие выполнены полыми,причем выходы насосов соединены с полостями направляющих и со сливными и напорными еМкортями.
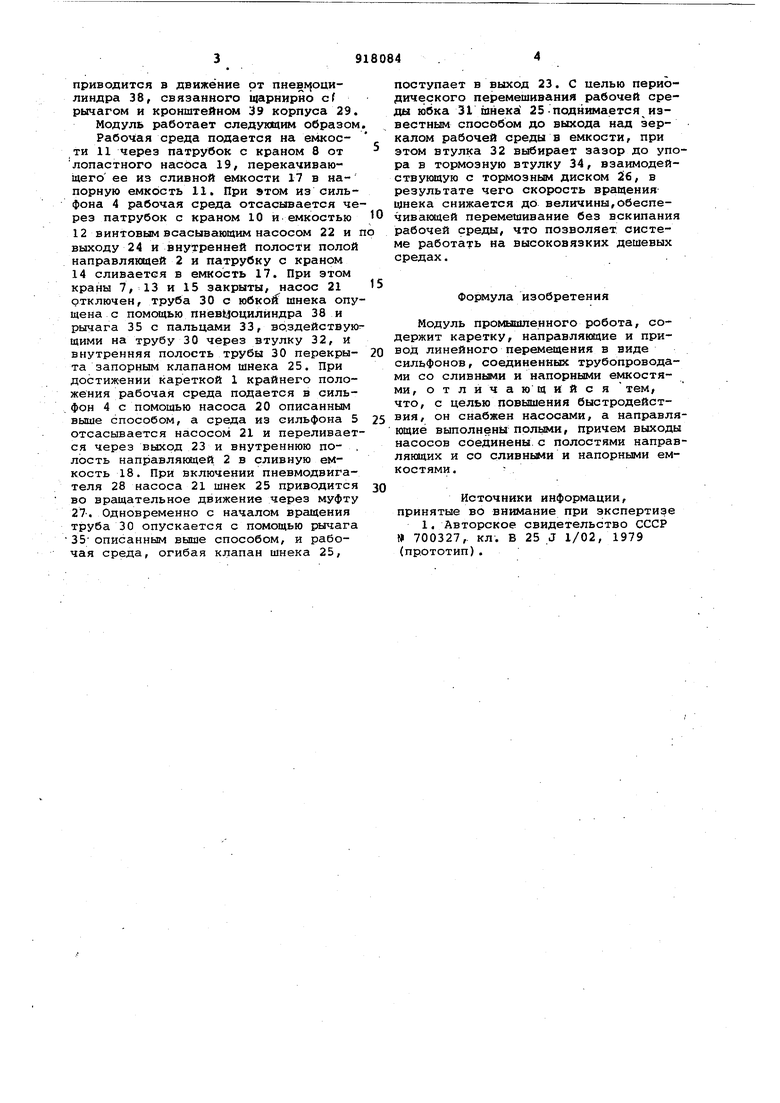
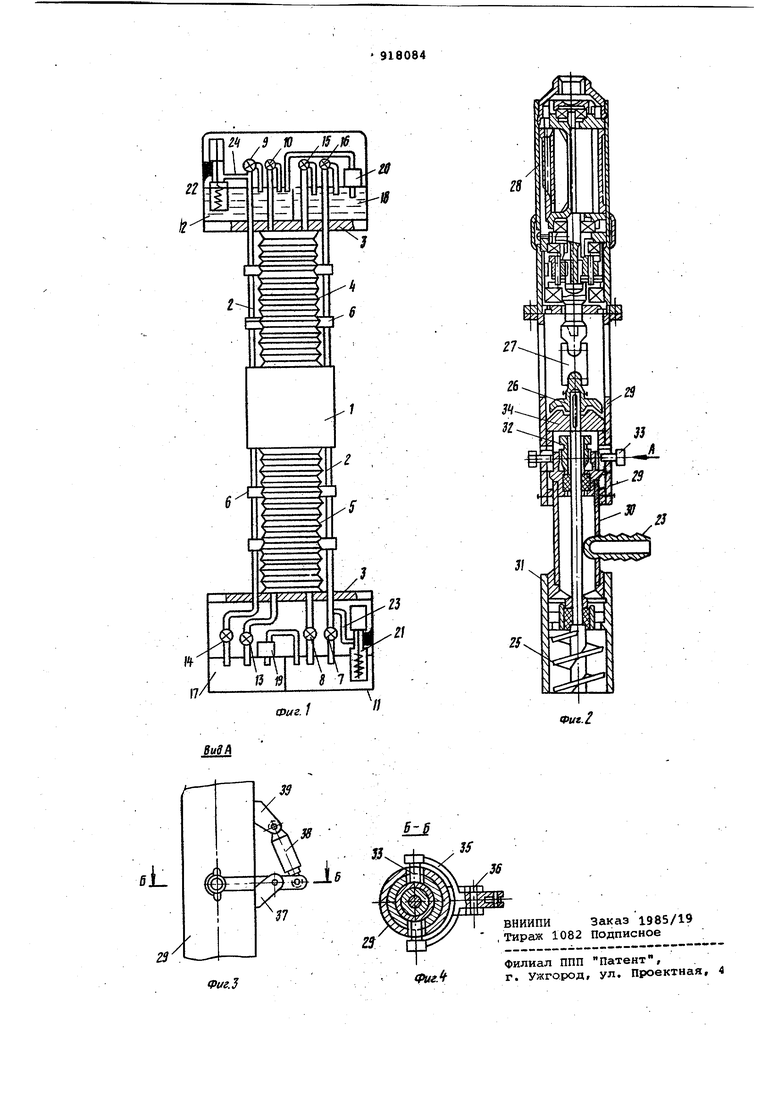
На фиг. 1 изображен модуль промышленного робота; на фиг. 2 - винтовой всасывающий насос; на фиг. 3 вид А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 3 i.
Модуль содержит привод линейного перемещения, состоящий из каретки .1, перемещающейся по направляющим 2, которые скреплены фланцаили 3, и силоа вые элементы, выполненные в виде сильфонов 4 и 5, соединенные посредством ползунов 6 с направляющими 2. Посредством отводов с кранами 7-10 сильфоны соединены с напорными емкостями 11 и 12, а с помощью кранов 13-16 - со сливными емкостями 17 и 18. На сливных емкостях установлены ло10пастные насосы 19 и 20, перекачивающие рабочую среду в напорные емкое-: ти 11 и 12, оборудованные винтовыми „ всасывающими насосами 21 и 22,выходы 23 и 24 которых соединены с полыми
15 направляющими 2, являкиимися одновременно трубопроводами, связывающими сливные и напорные емкости между собой.
Винтовой всасывающий насос (см.
20 фиг. 2) включает шнек 25, соединенный через фрикционный диск 26 и шариковую муфту 27 с ротационным-пневмодвигателем 28, закрепленньлл на корпусе 29, связанном с трубой 30 и
25 юбкой 31 шнека.
На штоке шнека свободно посажена втулка 32, связанная через пальцы 33 с тормозной втулкой 34 и рычагом 35, закрепленным шарнирно на оси 36
30 кр нштейна 37 корпуса 29. Рычаг 3f приводится в движение от пневг оцилиндра 38, связанного щарнирно с( рычагом и кронштейном 39 корпуса 29. Модуль работает следующим образом Рабочая среда подается на емкости И через патрубок с краном 8 от лопастного насоса 19, перекачивающего ее из сливной емкости 17 в напорную емкость 11. При STOM из сильфона 4 рабочая среда отсасьшается че рез патрубок с краном 10 и емкостью 12 винтовым всасывающим насосом 22 и выходу 24 и внутренней полости полой направляющей 2 и патрубку с краном 14 сливается в емкость 17. При этом краны 7, 13 и 15 закрыты, насос 21 отключен, труба 3D с юбкой шнека опу щена с помощью пнев }оцилйндра 38 и рычага 35 с пальцами 33, вб.здействую щими на трубу 30 через втулку 32, и внутренняя полость трубы 30 перекрыта запорным клапаном шнека 25. При достижении кареткой 1 крайнего положения рабочая среда подается в силь.фон 4 с помощью насоса 20 описанным выше способом, а среда из сильфона 5 отсасывается насосом 21 и переливает ся через выход 23 и внутреннюю полость направлякядей 2 в сливную емкость 18. При включении пневмодвигателя 28 насоса 21 шнек 25 приводится во вращательное движение через муфту 27. Одновременно с началом вращения труба 30 опускается с помощью рычага 35 описанным выше способом, и рабочая среда, огибая клапан шнека 25, поступает в выход 23. С целью периодического перемешивания рабочей среды юбка 31 шнека 25-поднимается известным способом до выхода над зеркалом рабочей среды в емкости, при этом втулка 32 выбирает зазор до упора в тормозную втулку 34, вза.имодействующую с тормозным диском 26, в результате чего скорость вращения щнека снижается до величины,обеспечивакхдей перемешивание без вскипания рабочей среды, что позволяет системе работать на высоковязких дешевых средах. Формула изобретения Модуль промышленного робота, содержит каретку, направлянвдие и привод линейного перемещения в виде сильФонов, соединенных трубопроводами со сливными и напорными емкостями, отличающийся тем, что, с целью повышения быстродействия, он снабжен насосами, а направляющие выполнены полыми, причем выходы насосов соединены с полостями направлягацих и со сливньами и напорными емкостями. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 700327,. кл. В 25 J 1/02, 1979 (прототип).
