I
Изобретение относится к весоиз/мерительной технике.
Известно устройство управления весовым дозатором, содержащее основной канал регулирования дозы и канал коррекции, элемент сравнения которых соединен между собой и с выходами весоизмерителя 13Это устройство обеспечивает необходиМую точность дозирования, однако его приборная реализация достаточно сложна, особенно в случае использования сельсинов.
Наиболее близким к изобретению по технической сущности является устройство управления весовым дозатором непрерывного действия, содержащее задатчик дозы с сельсиномдатчиком и весоизмеритель, емкость которого связана с бункером-накопителем, имеющим два питателя, каждый из которых связан с своей системой регулирования 2.
Недостаток устройства заключается в неудовлетворительной точности;, дозирования, которую.оно может обеспечить .
Цель изобретения - повышение точности дозирования.
Поставленная цель достигается тем, что в устройстве весоизмеритель снабжен зубчатой передачей, а каждая система регулирования выпол10нена в виде последовательно соединенных сельсина-приемника, усилителя и двигателя, связанного через редуктор с питателем, при этом статоры сельсинов-приемников электри15чески соединены со статором сельсина-датчика задатчика дозы, а их роторы механически связаны с зубчатой передачей весоизмерителя.
В предлагаемом устройстве осуще20ствляется двухступенчатое дозирование при помощи двух астатических следящих систем, одна из которых .осуществляет грубое дозирование, а
39t8
вторая - коррекцию дозы по ошибке первой системы.
.Суммирование действий обеих следящих систем осуществляется на весоизмерителе, общем для обоих каналов.
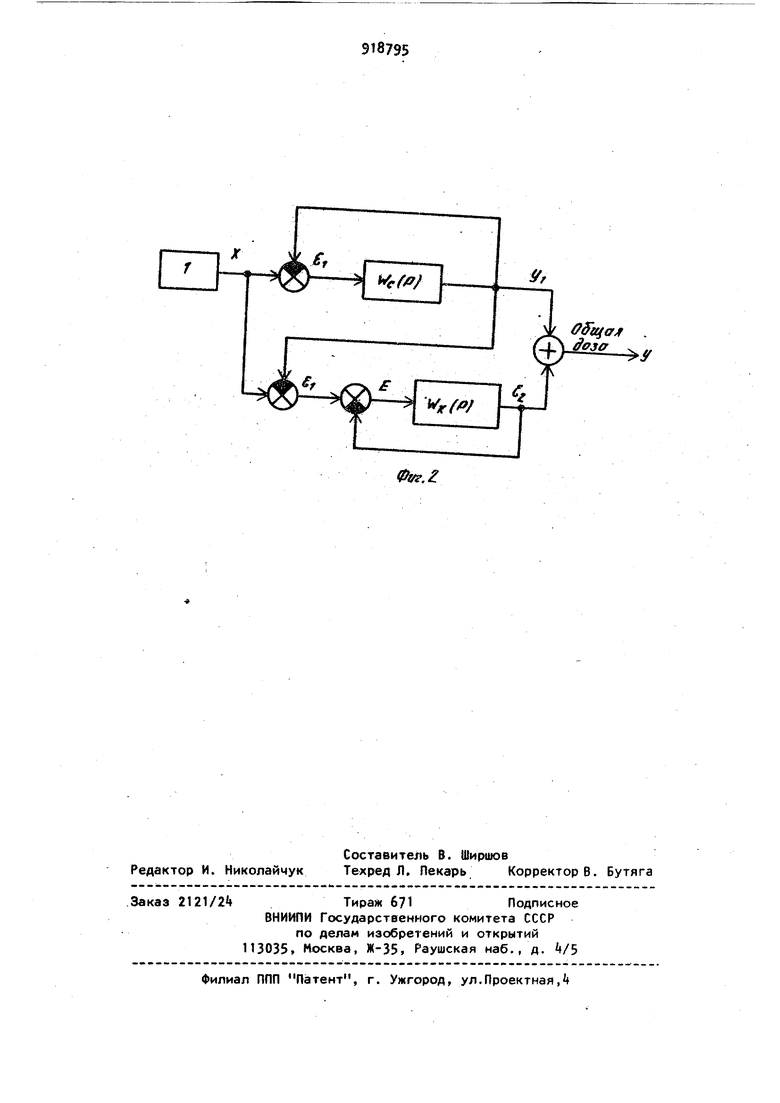
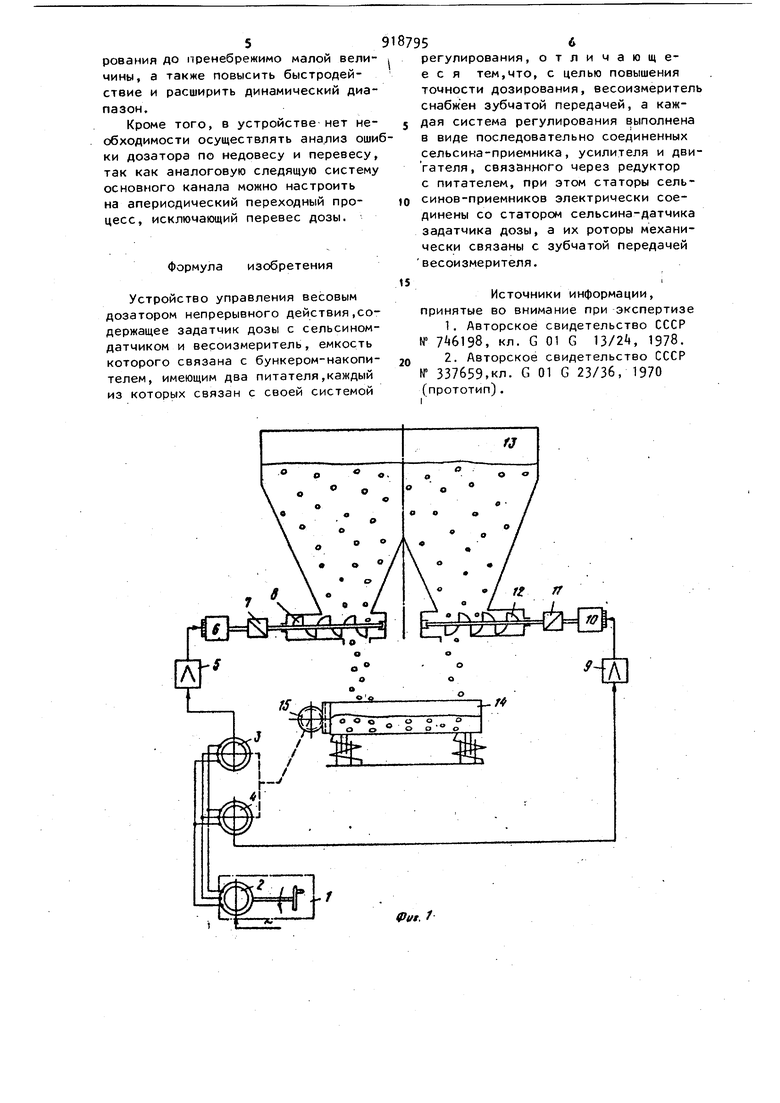
На фиг,1 приведена функциональная схема устройства;на фиг. 2 - его структурная схема.
Устройство управления весовым дозатором непрерывного действия состоит из задатчика 1 С сельсином-дат,чиком 2, связанных с ним сельсиновприемников 3 (грубого канала) и t (точного корректирующего канала), элементов силового канала: усилителя 5 двигателя 6, редуктора 7 и шиекового или другого питателя 8, элементов корректирующего канала: усилителя 9, двигателя 10, редуктора 11 и питателя 12, бункера-накопителя 13, весоизмерителя Т (например, с пружинами, оттарированными по массе дозируемого материала) с механической зубчатой передачей 15 передающей вращение на сельсины-приемники 3 и i.
На фиг.2 обозначены We(Р) - передаточная функция грубого силового канала, учитывающая динамические свойства сельсина-приемника 3, усили теля 5, двигателя 6, редуктора 7,питателя 8 и весоизмерителя (P) передаточная функция корректирующего контура, учитывающая динамические свойства сельсина-приемника , усилителя 9, двигателя 10, редуктора 11 питателя 12, весоизмерителя Е общая ошибка дозирования.,
Устройство работает следующим образом.
Задатчиком 1 устанавливается требуемая доза. При этом поворачивается ротор сельсинов-приемников 3 и i, появляются сигналы рассогласования пропорциональные заданной дозе, которые поступают на входы следящих систем силового и корректирующего каналов (соответственно на входы усилителей 5 и 9). Поскольку расчетные параметры силового канала и его точность известны, быстродействие корректирующего канала может быть выбрано ниже быстродействия силового навеличину отношения максимальной дозы и ошибки силового канаЛа. Это позволит силовому каналу с заданной ошибкой отрабатывать заданную дозу, исключив отработку
этой дозы корректирующим каналом, работающим по величине электрического сигнала, который не чувствует силовой канал (при меньшем быстродействии корректирующего канала его чувствительность значительно выше, чем у силового).
По сигналу с ротора сельсинаприемника 3 силовой канал отработает на весоизмеритель Il грубую заданную дозу, при этом роторы сельсинов-приемников 3 и i посредством зубчатой передачи 15 повернутся до согласованного с сельсином-датчиком 2 положения.
Сигналы на роторах сельсинов-приемников 3 и А при этом уменьшаются до нуля, но нулю равны не буДут, поскольку у силовой системы существует ошибка, обусловленная напряжением трогания (зоной нечувствителности) силовой системы.
Силовая система при этом остановится, но корректирующая будет работать, так как при более высокой ее чувствительности остаточный сигнал на роторе сельсина-приемника t представляет для нее достаточно большую величину.
Корректирующий канал отработает ошибку силового, добавив на весоизмеритель корректирующую поправку дозы.
Система, регулирующая дозу в дозаторе, обладает астатизмом второго порядка, а ее коэффициент передачи равен произведению коэффициентов передачи обоих каналов.
К К,
К
к
К - коэффициент передачи
где объединенной следящей системы;
j К, К - коэффициенты передачи соответственно силового и корректирующего каналов.
))n порядок астатизма, объединенной системы равен сумме порядков астатизма каждого из контуров, т.е. при астатизме первого порядка каждого канала общий порядок астатизма равен двум. Это означает, что система не имеет статической ошибки и динамической ошибки по скорости.
Эти свойства системы управления позволяют снизить погрешность дози5рования до пренебрежимо малой величины, а также повысить быстродействие и расширить динамический диапазон. Кроме того, в устройстве нет необходимости осуществлять анализ оши ки дозатора по недовесу и перевесу, так как аналоговую следящую систему основного канала можно настроить на апериодический переходный процесс, исключающий перевес дозы. Формула изобретения Устройство управления весовым дозатором непрерывного действия,содержащее задатчик дозы с сельсиномдатчиком и вероизмеритель, емкость которого связана с бункером-накопителем, имеющим два питателя,каждый из которых связан с своей системой 5 регулирования, отличающееся тем,что, с целью повышения точности дозирования, весоизмеритель снабжен зубчатой передачей, а каждая система регулирования выполнена в виде последовательно соединенных сельсина-приемника, усилителя и двигателя, связанного через редуктор с питателем, при этом статоры сельсинов-приемников электрически соединены со статором сельсина-датчика задатчика дозы, а их роторы механически связаны с зубчатой передачей весоизмеритеяя. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № , кл. G 01 G 13/2, 1978. 2.Авторское свидетельство СССР № 337659,кл. G 01 G 23/36, 1970 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИСТАНЦИОННЫЙ МНОГОКОМПОНЕНТНЫЙ ВЕСОВОЙДОЗАТОР | 1967 |
|
SU198718A1 |
| ПАТЕИТЙО-ТЕХННЧССНДЙБИБЛИОТЕКАА. И. Ангели | 1972 |
|
SU337659A1 |
| Устройство для управления весовым дозатором | 1987 |
|
SU1500849A1 |
| Устройство для управления весовым порционным дозатором | 1977 |
|
SU624120A1 |
| Автоматическое устройство для весового порционного дозирования | 1977 |
|
SU690318A1 |
| Автоматический весовой порционный дозатор | 1977 |
|
SU684323A1 |
| Устройство управления весовым порционным дозированием | 1978 |
|
SU746198A1 |
| УСТРОЙСТВО для СМЕШИВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 1965 |
|
SU170833A1 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПАПИЛЬОНИРОВАНИЯ ЗЕМЛЕСОСНОГО СНАРЯДА С НАПОРНЫМ СВАЙНЫМ ХОДОМ | 1969 |
|
SU242761A1 |
| Измеритель углового рассогласования и его производной для следящих систем | 1975 |
|
SU600518A1 |