1
Изобретение относится к измерительной технике, а именно к измерителям рассогласования двух осей, и может быть использовано, например, в следящих системах для получения двух напряжений, одно из которых пропорционально величине рассогласования, а другое - скорости изменения рассогласования осей, т. е. производной по времени от рассогласования.
Одновременная выработка сигналов, пропорциональных рассогласованию, и его производной широко используется в следящих системах для улучшения их динамических свойств 1.
Известен измеритель углового рассогласования и его производной для следящих систем, содержащий сельсин-датчики грубого и точного каналов, статорные обмотки которых соединены соответственно со статорными обмотками сельсин-приемников грубого и точного каналов, роторные обмотки сельсиндатчиков грубого и точного каналов подключены к источнику питания, роторные обмотки сельсин-приемников грубого и точного каналов соединены соответственно с первым и вторым входами блока переключения каналов, причем задающий вал системы механически соединен с ротором сельсин-датчика грубого канала и через первый редуктор - с ротором сельсин-датчика точного канала, а
выходной вал следящей системы механически соединен с ротором сельсин-приемника грубого канала и через второй редуктор - с ротором сельсин-приемника точного канала 2.
Известный измеритель углового рассогласования малонаделсен.
С целью повышения надежности измерителя в него дополнительно введены умножитель, пороговый элемент, демодулятор и фазовращатель, выход которого подключен к первому входу демодулятора, ко второ.му входу Которого подсоединена роторная обмотка сельсин-приемника точного канала, выход демодулятора подключен к первому входу умножителя, ко второму входу которого через пороговый элемент подсоединен выход блока переключения каналов.
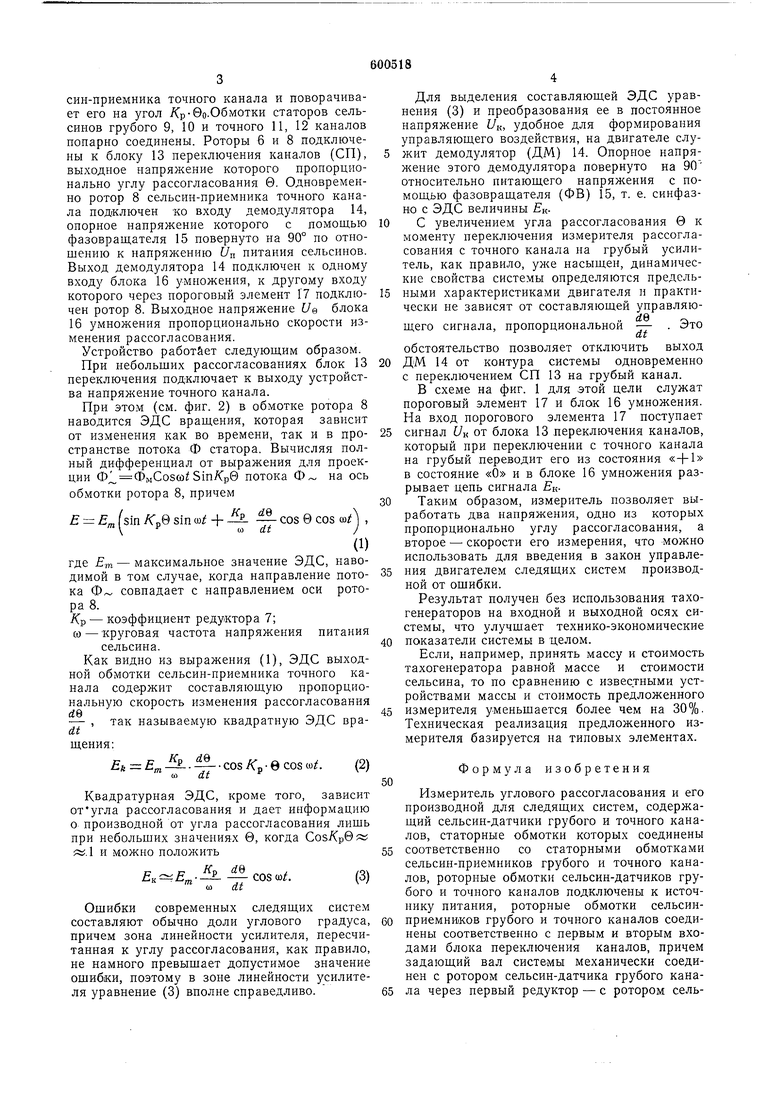
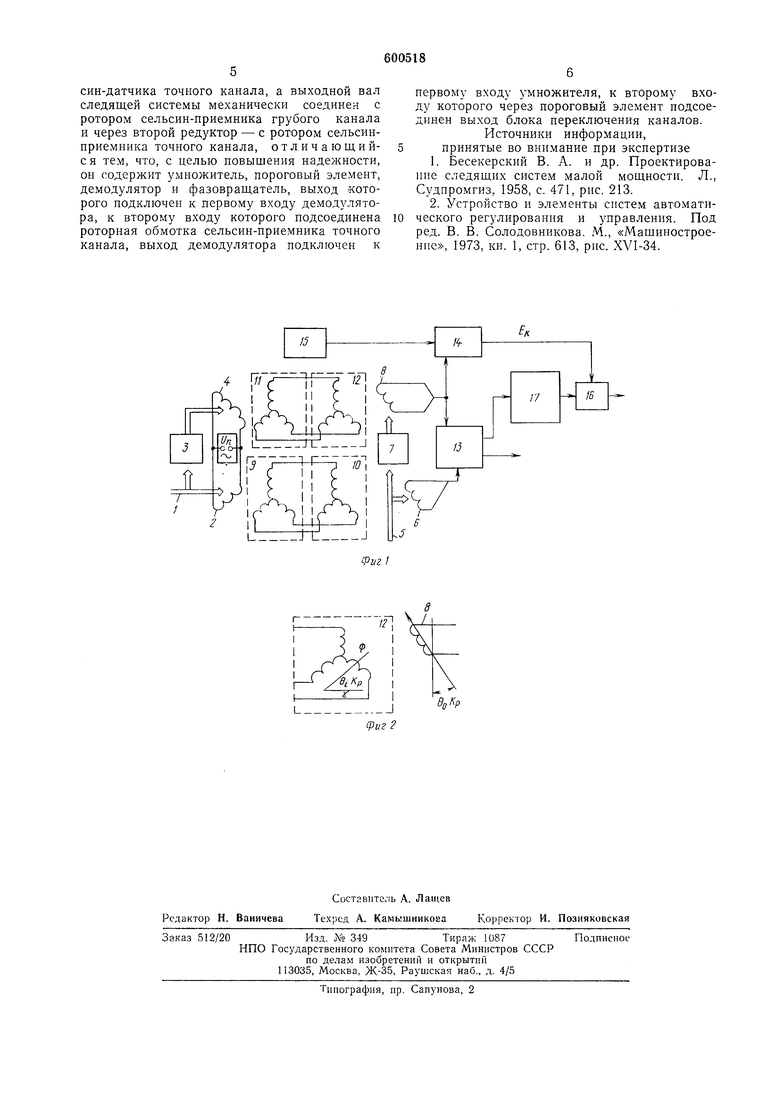
На фиг. 1 представлена структурная схема предложенного измерителя; на фиг. 2 - схема работы сельсин-приемника точного канала.
Задающий вал 1 системы связан с ротором 2 сельсин-датчика грубого канала и поворачивает его на угол в; и через повышающий редуктор 3 связан с ротором 4 сельсин-датчика точного канала и поворачивает его иа угол Лрвг. Выходной вал 5 системы связан с ротором 6 сельсин-приемника грубого канала и поворачивает его на угол во и через повышающий 7 связан с ротором 8 сельсин-приемника точного канала и поворачивает его на угол /Ср-Эо.Обмотки статоров сельсинов грубого 9, 10 и точного И, 12 каналов попарно соединены. Роторы 6 и 8 подключены к блоку 13 переключения каналов (СП), выходное напряжение которого пропорционально углу рассогласования 6. Одновременно ротор 8 сельсин-приемника точного канала подключен ко входу демодулятора 14, опорное напряжение которого с помощью фазовращателя 15 повернуто на 90° по отношению к напряжению Un питания сельсинов. Выход демодулятора 14 подключен к одному входу блока 16 умножения, к другому входу которого через пороговый элемент 17 подключен ротор 8. Выходное напряжение f/e блока 16 умножения пропорционально скорости изменения рассогласования. Устройство работает следующим образом. При небольщих рассогласованиях блок 13 переключения подключает к выходу устройства напряжение точного канала. При этом (см. фиг. 2) в обмотке ротора 8 наводится ЭДС вращения, которая зависит от изменения как во времени, так и в пространстве потока Ф статора. Вычисляя полный дифференциал от выражения для проекции Ф ФмСо5(й Sin/CpG потока Ф на ось обмотки ротора 8, причем Е f sin /Срв sin ш/; + - - cos в cos ш Ш dt где Ет-максимальное значение ЭДС, наводимой в том случае, когда направление лотока Ф совпадает с направлением оси ротора 8. /Ср - коэффициент редуктора 7; со - круговая частота напряжения питания сельсина. Как видно из выражения (1), ЭДС выходной обмотки сельсин-приемника точного канала содержит составляющую пропорциональную скорость изменения рассогласования - , так называемую квадратную ЭДС враа с ft -.-.cosArp-ecos«. (2) Квадратурная ЭДС, кроме того, зависит отугла рассогласования и дает информацию о производной от угла рассогласования лищь при небольших значениях в, когда Со5/Срвя ; «J.1 и можно положить P P P j prio ni/ CK - Cm ГГ Ошибки современных следящих систем составляют обычно доли углового градуса, причем зона линейности усилителя, пересчитанная к углу рассогласования, как правило, не намного превышает допустимое значение ошибки, поэтому в зоне линейности усилителя уравнение (3) вполне справедливо. Для выделения составляющей ЭДС уравнения (3) и преобразования ее в постоянное напряжение UK, удобное для формирования управляющего воздействия, на двигателе служит демодулятор (ДМ) 14. Опорное напряжение этого демодулятора повернуто на 90 относительно питающего напряжения с помощью фазовращателя (ФВ) 15, т. е. синфазно с ЭДС величины ЕК. С увеличением угла рассогласования в к моменту переключения измерителя рассогласования с точного канала на грубый усилитель, как правило, уже насыщен, динамические свойства системы определяются предельными характеристиками двигателя и практически не зависят от составляющей управляю„ dQ щего сигнала, пропорциональной - . dTO обстоятельство позволяет отключить выход ДМ 14 от контура системы одновременно с переключением СП 13 на грубый канал. В схеме на фиг. 1 для этой цели служат пороговый элемент 17 и блок 16 умножения. На вход порогового элемента 17 поступает сигнал UK от блока 13 переключения каналов, который при переключении с точного канала на грубый переводит его из состояния «+1 в состояние «О и в блоке 16 умножения разрывает цепь сигнала ЕК. Таким образом, измеритель позволяет выработать два напряжения, одно из которых пропорционально углу рассогласования, а второе - скорости его измерения, что можно использовать для введения в закон управления двигателем следящих систем производной от ошибки. Результат получен без использования тахогенераторов на входной и выходной осях системы, что улучшает технико-экономические показатели системы в целом. Если, например, принять массу и стоимость тахогенератора равной массе и стоимости сельсина, то по сравнению с известными устройствами массы и стоимость предложенного измерителя уменьшается более чем на 30%. Техническая реализация предложенного измерителя базируется на типовых элементах. Формула изобретения Измеритель углового рассогласования и его производной для следящих систем, содержащий сельсин-датчики грубого и точного каналов, статорные обмотки которых соединены соответственно со статорными обмотками сельсин-приемников грубого и точного каналов, роторные обмотки сельсин-датчиков грубого и точного каналов подключены к источнику питания, роторные обмотки сельсииприемни1ков грубого и точного каналов соединены соответственно с первым и вторым входами блока переключения каналов, причем задающий вал системы механически соединен с ротором сельсин-датчика грубого канала через первый редуктор - с ротором сельсин-датчика точного канала, а выходной вал следящей системы механически соединен с ротором сельсин-приемника грубого канала и через второй редуктор - с ротором сельсинприемника точного канала, отличающийс я тем, что, с целью повышения надежности, он содержит умножитель, пороговый элемент, демодулятор и фазовращатель, выход которого подключен к первому входу демодулятора, к второму входу которого подсоединена роторная обмотка сельсин-приемника точного канала, выход демодулятора подключен к
первому входу умножителя, к второму входу которого через пороговый элемент подсоединен выход блока переключения каналов.
Источники информации, принятые во внимание при экспертизе
1.Бесекерский В. А. и др. Проектирование следящих систем малой мощности. Л., Судпромгиз, 1958, с. 471, рис. 213.
2.Устройство и элементы систем автоматического регулирования и управления. Под ред. В. В. Солодовникова. М., «Машиностроение, 1973, кн. 1, стр. 613, рис. XVI-34.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1978 |
|
SU744435A1 |
| Следящий электропривод | 1980 |
|
SU903804A1 |
| Устройство для задания угла в системах автоматического управления | 1972 |
|
SU451984A1 |
| ДВУХКАНАЛЬНАЯ ДИСТАНЦИОННАЯ ПЕРЕДАЧА | 1956 |
|
SU112238A1 |
| Следящая система | 1979 |
|
SU903803A2 |
| Следящая система | 1973 |
|
SU452804A1 |
| Фазовая следящая система | 1976 |
|
SU779970A1 |
| Следящая система | 1977 |
|
SU622044A1 |
| Устройство для измерения и задания нагрузки на долото | 1981 |
|
SU1024585A1 |
| Цифро-аналоговая следящая система | 1976 |
|
SU572774A1 |
