(54) СПОСОБ И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА
I
Изобретение относится к измерительгной технике и может быть использовано при измерении крутящего момента.
Известен способ измерения момента на валу путем преобразования мсмента с помощью двух датчиков скорости вращения вала в сдвинутые по фазе гармонические сигналы. По данному способу квантуют по уровням амплитуду опер&жающего сигнала до момента перехода , нулевого уровня отстающим сигналом, и по числу квантующих уровней судят об измеряемом параметре 1.
Недостатком способа является низкая точность измерения влияния высших гармоник, содержащихся в сигналах датчиков, а также из-за неточности ква тования по уровням.
Известен способ измерения крутящ го момента по отношению временного сдвига к периоду вращения вала, которое зависит от угла скручивания. По этому способу при врашении вала проювоантся считывание меток неподвижно установленными датчиками. Временной сдвиг между импульсами датчиков пропорционален углу закручивания и периоду вращения вала. Путем преобразования полученных сигналов определяют величину крутящего мсачента. Для повышения ности измерения, полученные сигналы заполняются импульсами опорной часто ты Г2.
Недостатком известного способа яв10ляется суммирование погрешности формирова(П1Я длительности импульса, образуемой за счет разности фаз меток измерительного диска и пропорциональной величине крутящего момента. Кроме Toroi
1$ устройства для реализации этого способа характеризуются низкой разрещак щей способностью.
Цель изобретения - повышение чу&ствительности и точности.
X
Поставленная цель достигается таи, что разность фаз определяют по разности числа импульсов опорной частоты за первые в вторые полупериоды враще(тя
вала. В устройстве для измерения крутящего момента по предлагаемому способу отметчики угла положения вала сдвинуты друг относительно друга на 1 8О, а измерительная схема выполнена в виде двух фазокомпенсаторов, двух триггеров, двух управляемых ключей, схем управления и индикации, формирования времени измерения и индикации, генератора опорной частоты, реверсивного счетчика и регистра памяти, при этом датчики считывания через фазокомпенсаторы соединены с первыми входами триггеров, вторые входы которых соединены со схемой управления, а выходы подсоединены к первым входам управляемых ключей, вторые, и третьи входы которых соедине ы соответственно с генераторем опорной частоты и схемой формирования времени измерения и индикации, выходы управляемых ключей подсоединены к счетным входам реверсивного счетчика, связанного со схемой управления и регистром памяти, который соединен со схемами управления и индикаиии.
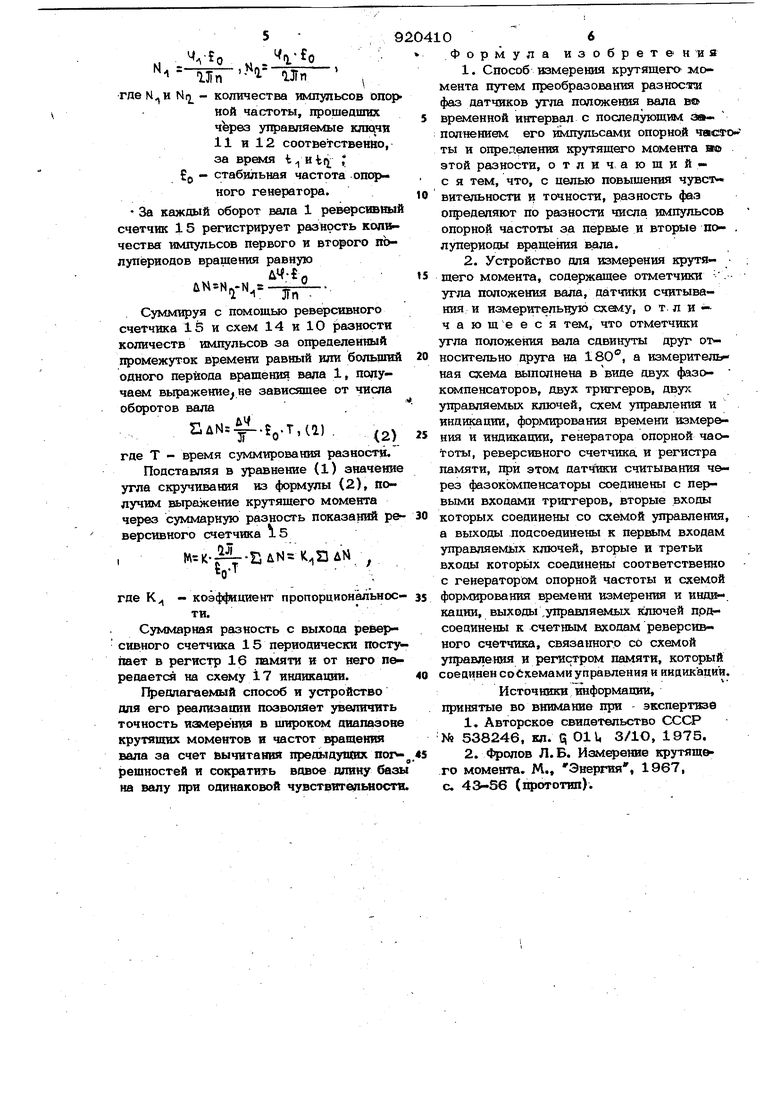
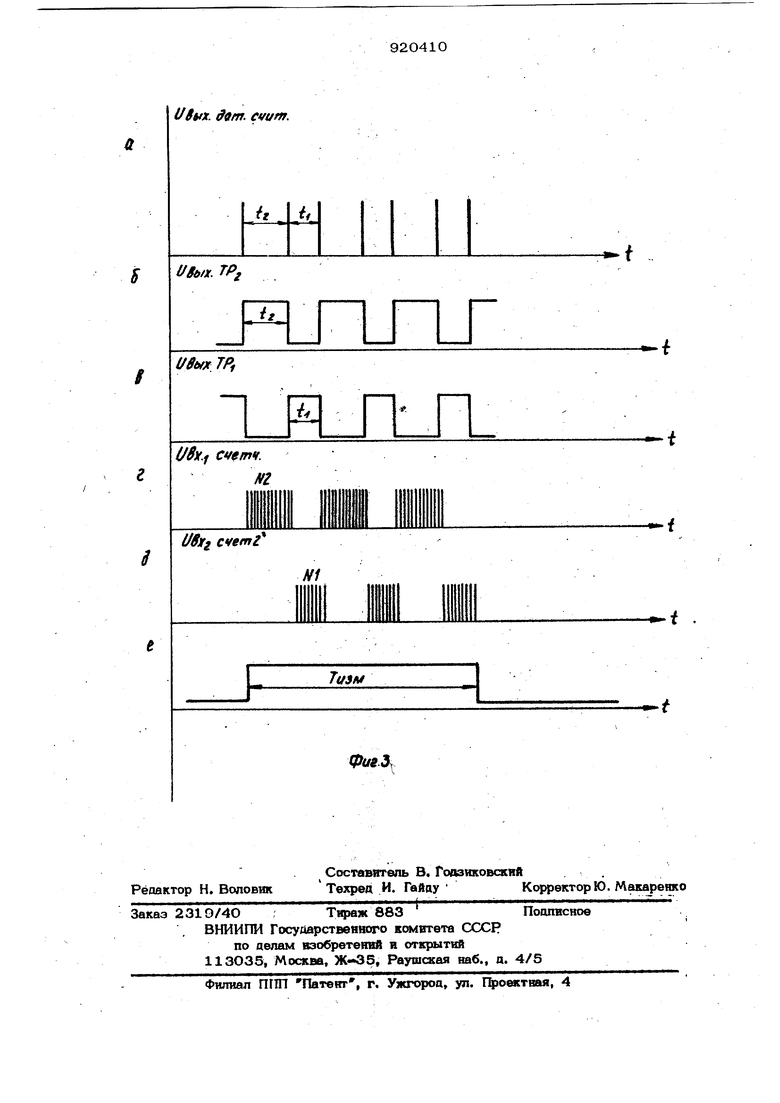
На фиг. 1 изображена схема устройства для реализации предлагаемого способа; на фиг, 2 - положение отметчиков на валу при нагружении последнего; на фиг. 3 - графики, поясняющие работу устройства.
Устройство содержит два укрепленных на противоположных концах вала 1 отметчика 2 и 3, сдвинутых относительгно друг друга на 180°, неподвижные датчики 4 и 5, считывающие с отметчиков 2 и 3 угол их относительного положения на валу 1. Выходы датчиков 4 и 5 подключены к входам фазокомпенсаторов 6 и 7, предназшченных для устранения погрешностей начальной установки датчиков считывания 4 и 5. Выходы фазсжомпенсаторов 6 и 7 подсоединены к входам триггеров 8 и 9, преобразующих угловые интервалы во временные. Триггеры 8 и 9 соединены с выходами схемы 10 управления и формируют попеременно отпирающие сигналы на первых входах управляемых ключей 11 и 12. Вторые входы ключей Ц и 12 связаны с генератором 13 опорной частоты, заполняющим временные интервалы импульсами опорной частоты. Третьи входы клкчей 11 и 12, соединены с выходами сх&мы 14 формщ ования времени измерения и индикации. Импульсы опорной частоты с выходов ключей 11 и 12 поочередно подаются на прямой и обратный счетные
ВХОДЫ реверсивного счетчика 15, взаимодействующего со схемой. 10 управления.
Суммарная разность с реверсивного счетчика 15 последовательно проходит 5 регистр 16 памяти и схему 17 индикации. Регистр 16 памяти соединен со схемой 10 управления.
Величина крутящего момента пропорциональна разности углов положения 0 отметчиков 2 и 3
Mr Ц((/,./)Kft +u fj-iq-.Vj K-li-f,(1)-.
где М - величина крутящего момента
Ч ,4. - углы относительного положения 5осей отметчиков на окружнос
ти вала под нагрузкой} 4f) - исходнь1й угол относительного положения осей отметчиков на окружности вала без на0грузки, равной 18О
A - угол скручивания вала. Под действием крутящего момента, передаваемого валом 1, происходит от носительное смешение по окружности от- 5 метчиков 2 и 3 от первоначального положения (фиг. 2). С выходов датчиков считывания 4 и 5 снимаются сигналы углоьых интервалов Ч и ifn разность которых. пропорциональна измеряемому мо0 менту. Эти сигналы после компенсирования погрешности от начальной установки отметчиков в фазокомпенсаторах 6 и 7 поступают на входы триггеров 8 и 9. Триггеры 8 и 9 преобразуют сигналь угловых интервалов во временные и формируют импульсы, поочередно открыва-iющие -КЛЮЧИ 11 и 12 соответственно на время (графики Бив фиг. З)
, i urH ifc-.
где t и Та. - время прохождения отметчиками 2 и 3 углов Ч н Чг относительно неподвижных датчиков считывания 4 и 5;
М - число оборотов вала за 1 с. ФроНты импульсов t ., и tj управляют ключами 11 и 12, пропускающими импульсы вь1сокой частоты опорного генератора 13 на входы реверсивного счетчика 15. На графт ах г и а (фиг. 3). показаны осшшпогрвфы заполнения реверсивного счетчика в Течетга временных интервалов t и tft высокочастотными импульсами через входы прямого и обратного, счета.
При ннгружении вала 1 количества этих импульсов аа один оборот будут соответственно равны . vio 13in - On где Nt2 - количества импульсов опор ной частоты, прошедших через управляемые кпвдчи 11 и 12 соответственно, за время t Htrj; ; р - стабильная частота опор ного генератора. За кеикдый оборот вала 1 реверсивны счетчик 15 регистрирует разность KomSfчества импульсов первого и второго полупёриодов вращения равную Суммируя с помощью реверсивного счетчика 15 и схем 14 и 10 разности количеств импульсов за определенный промежуток времени равный или больргай одного периода врашения вала 1, получаем выражение не зависящее от числа оборотов вала S NT-V l)(2) где Т - время суммирования разности. Подставляя в уравнение (1) значение утла скручивания из формулы (2), получим вьфажение крутящего момента через суммарную разность показаний ре версивного счетчика 15 -auN-K-auN где К - коэффициент пропорциональное ти. Суммарная разность с выхода реверсив;ного счетчика 15 п иодически посту пает в регистр 16 памяти и от него передается на схему 17 индикации. Г еолагаемый способ и устройство Ш1Я его реализации позволяет увеличить точность измерения в щироком диапазоне крутящих моментов и частот вращения вала за счет ьычитатш префшуших nonрешностей и сократить вдвое длину базы на валу при одинаковой чувствительности 9 0 Формула изобретения 1.Способ измерения крутящега момента путем преобразования разносчгн фаз датчиков угла положения вала вго временной интервал с последующим за-полнением его импульсами опорной чаето ты и определения крутящего момента та этой разности, отличающий - с я тем, что, с целью повышения чувст вительности и точности, разность фаз ощэедаляют по разности числа импульсов опорной частоты за первые и вторые по- . лупериоды вращения вала. 2.Устройство для измерения крутящего момента, содержащее отметчики -. угла положения вала, датчики считывания и измерительную схему, о т. л и -чающееся тем, что отметчики утла положения вала сдвинуты друг относительно друга на 180, а измеритель ная схема выполнена в виде двух фазоксвлпенсаторов, двух триггеров, управляемых ключей, схем управления и индикации, формирования времени измер&ния и индикации, генератора опорной чаототы, реверсивного счетчика и регистра памяти, при этом датчгики считывания через фазокомпенсаторы соединены с первыми входами триггеров, вторые входы которых соединены со схемой управления, а выходы подсоединены к первым входам управляемзых ключей, вторые и третьи входы которых соединены соответственно с генератором опорной частоты и схемой формирования времени измерения и инди-. кации, выходы ,управляемых ключей присоединены к счетным входам реверсивного счетчика, связа1шого со схемой управления и регистром памяти, который соединен собхемамиуправления и иипикации. Источники информации, принятые во внимание при - экспертизе 1,Авторское свидетельство СССР hfe 538246, кл. (5 01U 3/1О, 1975. 2.Фролов Л. Б. Измерение крутящего момента. М., Энергия, 1967, с. 43-56 (щвототип).
/
{I:
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения крутящего момента | 1981 |
|
SU996876A1 |
| Цифровой моментомер | 1979 |
|
SU830159A1 |
| Цифровой моментомер | 1980 |
|
SU964494A2 |
| Устройство для измерения мощности на валу | 1986 |
|
SU1428953A1 |
| ПЛКЙТНО-ИХШЕСЙА*ЬИБ;1ИО'^ЕКАГ. Л. Биланов | 1972 |
|
SU342297A1 |
| Устройство для измерения угла закручивания вращающегося вала | 1991 |
|
SU1795312A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НАГРУЖЕНИЕМ ПРИ ПРОГРАММНЫХ ИСПЫТАНИЯХ МЕХАНИЧЕСКИХ КОНСТРУКЦИЙ НА УСТАЛОСТНУЮ ПРОЧНОСТЬ | 2007 |
|
RU2365963C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ АБСОЛЮТНОЙ ВЛАЖНОСТИ | 1991 |
|
RU2019821C1 |
| Устройство для определения производительности пульсирующих насосов | 1981 |
|
SU992065A1 |
| Датчик анализатора циклограммы вращения вала | 1980 |
|
SU907443A1 |
U$nx. Л/7Г. cvum.
г
t,
. TPi
t/8bfx 7PI
/
f/Sy.f cvf/nv. ffZ
l/fyg cvemZ
8
N1
Фие
