(5) УСТРОЙСТВО ДЛЯ КРЕПЛЕНИЯ НА КОРПУСЕ ОПЕРАТОРА РУЧНОГО КИНОАППАРАТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Подвес трехосного гиростабилизатора киноаппарата | 1981 |
|
SU989321A1 |
| Устройство для крепления на корпусе оператора ручного киноаппарата | 1978 |
|
SU711527A1 |
| Устройство для крепления на корпусе оператора ручного киноаппарата | 1978 |
|
SU673961A1 |
| Устройство для крепления на корпусе оператора ручного киносъемочного аппарата | 1981 |
|
SU996787A1 |
| Трехосный гиростабилизатор киноаппарата | 1981 |
|
SU979855A1 |
| Устройство для стабилизации оптического изображения киноаппарата | 1983 |
|
SU1113771A1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ ГИРОСТАБИЛИЗИРОВАННЫЙ КИНО-ТЕЛЕОПЕРАТОРСКИЙ КРАН | 1996 |
|
RU2115615C1 |
| Устройство для стабилизации оптического изображения киноаппарата | 1982 |
|
SU1048318A1 |
| Устройство для крепления киносъемочного аппарата на корпусе оператора | 1988 |
|
SU1525665A1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
I
Изобретение относится к киносъемочной технике, в маетности к устройствам для крепления на корпусе оператора ручного киноаппарата, предназначенного для киносъемок при перемещении оператора.
il3BecTHo устройство для крепления на корпусе оператора ручного киноаппарата , содержащее кардановый подвес, связанный с механизмом вертикального перемещения, выполненный в виде шарнирно связанных горизонтального и вертикального звеньев, и три зубчатых колеса, два из которых установлены на вертикальном звене, а третье - на гооизонт1альном звене СП.
Наиболее близким техническим решением к изобретению является устройство для крепления на корпусе оператора ручного киноаппарата, содержащее, два связанных между собой параллелограммных механизма с кривошинами и пружинами, один из которых связан
С кардановым подвесом, в котором установлен киноаппарат, а другой параллеЬограммкый механизм имеет вертикальную ось вращения и связан с жилетом оператора 112.1.
Недостатком этого устройства является низкая точность стабилизации, . которая объясняется тем, что угловая жесткость,обеспечиваемая стабилизатором, принципиально не может
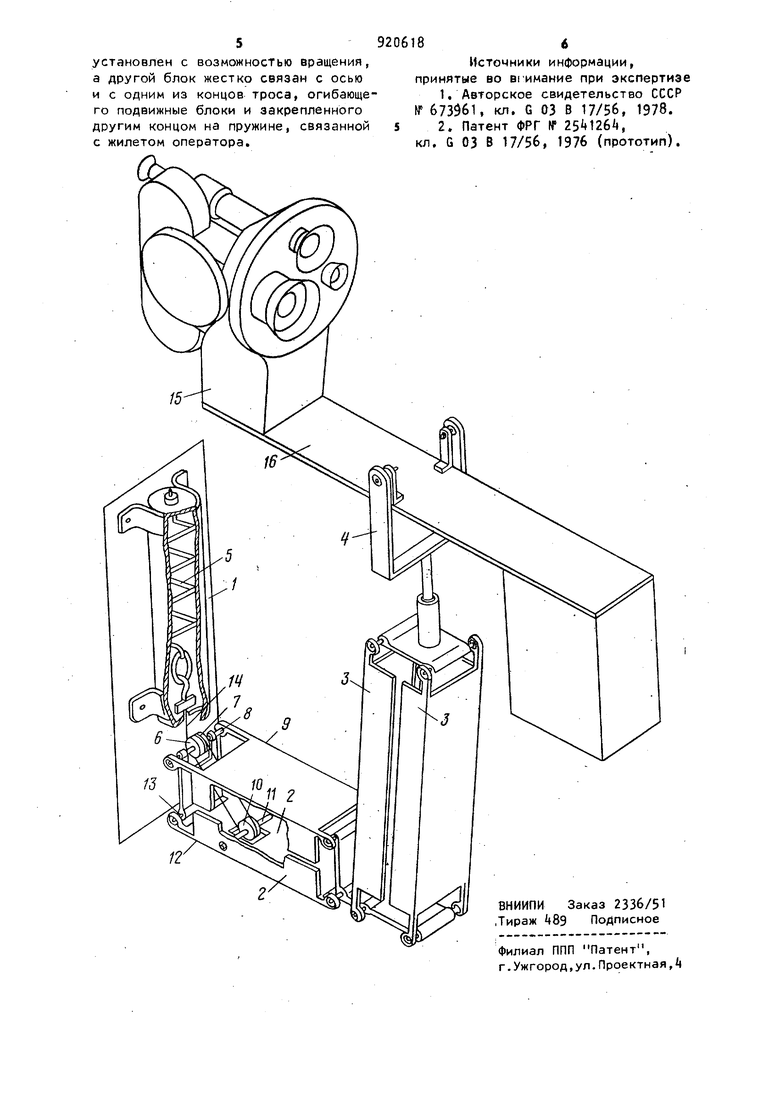
10 быть сделана нулевой, т.е. невозможно сделать так, чтобы момент, создаваемый пружинно-рычажной системой, при любом угловом положении подвеса полностью уравновешивал момент от ве15са киноаппарата и элементов констрации. Поэтому при использовании стабилизатора на подвижном основании (автомобиле и пр,) на киноаппарат оказывают влияние перемещения осно20вания и он совершает колебательное движение. Кроме того, расположение пружин параллелограммных механизмах приводит к появлению дополнительных 3 9 инерционных возмущений на стабилизируемый объект, которые снижают точность стабилизации при перемещениях основания, вызывающих повороты параллелограммных механизмов и смещение их центра тяжести. Целью изобретения является повышение точности стабилизации положения киноаппарата и удобство в работе Указанная цель достигается тем, что в устройство введены три блока и трос, при этом один из блоков установлен с возможностью вращения на одном из кривошипов параллелограммно го механизма, связанного с жилетом оператора, а два других блока расположены соосно на оси другого кривошипа упомянутого параллелограммного механизма, причем один из них устано лен с возможностью вращения, а друго блок жестко связан с осью и с одним из концов троса, огибающего подвижны блоки и закрепленного другим концом по пружине, связанной с жилетом оператора. На чертеже представлена кинематическая схема. Устройство состоит из корпусного жилета 1 оператора (на чертеже не казан) двух параллелограммных механизмов 2 и 3, карданова подвеса 4, уравновешивающей пружины 5, вращаю-щегося 6 и неподвижного 7 блоков, установленных на оси 8 верхнего кри вошипа 9 параллелограммного механиз ма 2, подвижного блока 10, установленного на оси 11 нижнего кривошипа 12, имеющего ось 13 вращения, тр са И, киноаппарат 15, платформы 16 Платформа 16 с закрепленной на ней киноаппаратом 15 подвеш.ена в двухос ном кардановом подвесе 4, который укреплен на параллелограммном механизме 3. На оси b верхнего кривошипа 9 механизма 2 соосно установлены два блока - вращающийся 6 и неподви ный 7t На нижнем кривошипе 12 механизма 2 установлен подвижный блок 1 Трос И закреплен на блоке 7, переброшен через блоки 10 и 6 и укреплен на нижнем конце уравновешивающе пружины 5. -Верхним концом пружина 5 закреплена на корпусном жилете 1 оператора. Параллелограммнцй механизм 2 связан с корпусным жилетом 1 оператора и имеет вертикальную ось вращения (не показана), совпадающу с вертикальной частью троса Таким образом, предлагаемое устройство обеспечивает киноаппарату 15 три линейные и две угловые степени свободы. Чем жестче связь киноаппарата 15 с корпусным жилетом 1 оператора,тем большее влияние на киноаппарат 15 оказывают ускорения операторского транспорта (а, следовательно, и оператора). В данном устройстве обеспечена полная компенсация момента от веса киноаппарата 15 моментом, создаваемым пружиной 5, при любом угловом положении параллелограммного механизма 2, т.е. осуществлен подвес с нулевой угловой жесткостью. Такой подвес обеспечивает не возмущаемое положение киноаппарата при вертикальных перемещениях оператора. В устройстве возможны две регулировки - жесткости и начальной длины пружины. Регулировкой можно устранить влияние технологических погрешностей на точность компенсации момента от веса киноаппарата. Таким образом, устройство позволяет повысить точность стабилизации .за счет полной компенсации момента от веса киноаппарата моментом, создаваемым пружиной,и облегчает работу с ним. Формула изобретения Устройство для крепления на корпусе оператора ручного киноаппарата, содержащее два связанных между собой параллелограммных механизма с кривошипами и пружинами, один из которых связан с кардановым подвесом, в котором установлен киноаппарат, а другой параллелограммный механизм имеет вертикальную ось вращения и связан с жилетом оператора, отличающееся тем, что, с целью повышения точности стабилизации положения киноаппарата и удобства в работе, в него введены три блока и трос, при этом один из блоков установлен с возможностью вращения на одном из кривошипов параллелограммного механизма, связанного с жилетом оператора, а два других блока расположены соосно на оси другого кривошипа упомянутого параллелограммного механизма, причем один из них
