Изобретение относится к грузоподъемным машинам, в частности к кинооператорским кранам, размещающимся на различных подвижных носителях: автомобилях, судах и др.
Наиболее близким решением по технической сущности является дистанционно-управляемый кинооператорский кран, содержащий стрелу, состоящую из телескопически связанных подвижной и неподвижной секций, последняя из которых шарнирно смонтирована на вертикальной стойке (основании) с возможностью вертикального поворота, и связанную с вертикальным приводом стрелы, причем вертикальная стойка установлена на основании (платформе) с возможностью горизонтального поворота и связана с приводом горизонтального поворота, первое шарнирное звено для размещения на нем киносъемочной камеры, закрепленное на подвижной секции стрелы, второе и третье шарнирные звенья, образующие с первым шарнирным звеном и подвижной секцией шарнирно-рычажный механизм параллелограммного типа, причем на звене, параллельном подвижной секции, закреплена зубчатая рейка, взаимодействующая с приводом выдвижения подвижной секции и смонтированная с возможностью осевого перемещения в корпусе, шарнирно закрепленном на вертикальной стойке эксцентрично относительно оси шарнира крепления неподвижной секции на вертикальной стойке, а на корпусе смонтирован привод выдвижения подвижной секции, кинематически связанный с противовесом, подвижно закрепленным в хвостовой части неподвижной секции стрелы, пульт управления, электронные блоки управления вертикальным и горизонтальным поворотом стрелы (Авт.св. СССР N 1217774, кл. B 66 C 23/72,1986).
Приведенный выше дистанционно управляемый операторский кран имеет следующие недостатки:
колебания частей носителя, на котором он установлен, а также люфты привода механизмов крана и другие перемещения его конструкции вызывают значительные угловые и поступательные колебания съемочной аппаратуры, негативно влияющие на качество изображения;
конструкция параллелограммного механизма значительно усложняет сборку, увеличивает вес крана и не обеспечивает вертикальности шарнирного звена при наклонах, качке и ускорениях носителя, что нарушает горизонтальность кадра при использовании любой панорамной головки для установки камеры;
угловые колебания носителя передаются всей конструкции крана, вызывая повышенную нагрузку на части носителя, к которым прикреплен кран, ограничивают возможности выбора носителя и требуют усиления его частей;
поступательные колебания носителя кран передает камере, что вызывает колебания изображения даже в случае применения для съемки гиростабилизированных панорамных головок.
В основу изобретения поставлена задача создания такого дистанционно управляемого гиростабилизированного кино-телеоператорского крана, в котором стрела имеет внутреннюю часть, связанную с приводом поворота внутренней части вокруг оси стрелы и шарнирным звеном, а механизм параллолелограммного типа состоит из ведущего и ведомого блоков, связанных между собой тросом. При этом в кран введены электронные блоки управления шарнирным звеном и внутренней частью стрелы, на шарнирном звене установлен гироскопический чувствительный элемент шарнирного звена, продольный и вертикальный акселерометры с измерительными осями, перпендикулярными оси подвеса шарнирного звена, на внутренней части стрелы - гироскопический чувствительный элемент всей стрелы с измерительной осью параллельной оси подвеса стрелы, а на вертикальной стойке - гироскопический чувствительный элемент вертикальной стойки с измерительной осью, параллельной оси подвода вертикальной стойки относительно основания, при этом первый вход электронного блока управления шарнирным звеном соединен с выходом продольного акселерометра, второй вход - с выходом гироскопического чувствительного элемента шарнирного звена, а выход - с входом привода шарнирного звена, первый вход электронного блока управления внутренней частью стрелы подключен к выходу поперечного акселерометра, второй вход - к выходу гироскопического чувствительного элемента внутренней части стрелы, а выход - к входу привода внутренней части стрелы, первый вход электронного блока управления вертикальным поворотом стрелы соединен с выходом пульта управления, предназначенным для вертикального поворота стрелы, второй выход - с выходом гироскопического чувствительного элемента всей стрелы, третий вход - с выходом вертикального акселерометра, а выход - с входом привода вертикального поворота стрелы, первый вход электронного блока управления горизонтальным поворотом стрелы подключен к выходу гироскопического чувствительного элемента вертикальной стойки, второй вход - к первому выходу пульта управления, предназначенному для горизонтального поворота вертикальной стойки, привод вертикального поворота стрелы, приводы внутренней части стрелы и шарнирного звена закреплены в хвостовой секции стрелы с возможностью выполнения функции противовеса. Предлагаемое изобретение обеспечивает кинематическую изоляцию шарнирного узла с установленной на нем кино-телесъемочной аппаратурой от всех угловых колебаний носителя, угловые движения которого практически не влияют на движение съемочной аппаратуры, определяемое сигналами с пульта управления краном, кинематическую изоляцию стрелы от угловых колебаний носителя вокруг вертикальной оси и оси подвеса стрелы, что при движении носителя позволяет существенно снизить нагрузки на него со стороны основания крана. Автоматизация процесса управления стрелой обуславливает компенсацию вертикальных поступательных колебаний носителя в месте крепления кино-телесъемочной аппаратуры. В результате, обеспечивается четырехосная гиростабилизация предложенной конструкции кино-телеоператорского крана, за счет чего съемочная аппаратура сохраняет свою ориентацию независимо от движения носителя, значительное упрочнение и сокращение веса конструкции, что в целом позволяет получить стабильное и качественное горизонтальное изображение снимаемого статичного или движущегося объекта, а также значительно расширить операторские возможности.
Поставленная задача решается тем, что в дистанционно управляемом гиростабилизированном операторском кране, содержащем доотличительные признаки: шарнирное звено для размещения кино-телесъемочной аппаратуры, закрепленное на конце стрелы с возможностью поворота вокруг горизонтальной оси, перпендикулярной оси стрелы, связанное с приводом шарнирного звена посредством механизма параллелограммного типа, стрелу, шарнирно смонтированную на вертикальной стойке с возможностью вертикального поворота и связанную с вертикальным приводом стрелы, причем вертикальная стойка установлена на основании с возможностью горизонтального поворота и связана с горизонтальным приводом вертикальной стойки, закрепленной в хвостовой части стрелы, противовес, пульт управления и электронные блоки вертикальным и горизонтальным поворотом стрелы, имеются перечисленные выше отличительные признаки, достаточные во всех случаях, на которые распространяется испрашиваемый объем правовой охраны.
Изобретение поясняется схемой.
На чертеже представлена электронно-кинематическая схема дистанционно управляемого гиростабилизированного операторского крана.
Дистанционно управляемый гиростабилизированный операторский кран содержит стрелу 1, состоящую из внутренней ее части 2, выполненной с возможностью поворота в подшипниках 3, 4 по оси 5 стрелы, связанной с приводом 6 внутренней части стрелы. Стрела 1 смонтирована на вертикальной стойке 7 с возможностью вертикального поворота в подшипниках 8, 9 вокруг оси 10 подвеса стрелы и связана с приводом 11 вертикального поворота стрелы, причем вертикальная стойка 7 установлена на основании 12, размещенном на носителе 13 с возможностью горизонтального поворота в подшипнике 14 вокруг оси 15 подвеса вертикальной стойки, и связана с приводом 16 горизонтального поворота вертикальной стойки. Шарнирное звено 17 для размещения кино-телесъемочной аппаратуры 18, закрепленное на конце внутренней части 2 стрелы с возможностью поворота вокруг оси подвеса 19 шарнирного звена в подшипнике 20, перпендикулярной оси 5 стрелы, связанное с приводом 21 поворота шарнирного звена посредством механизма 22 параллелограммного типа, состоящего из ведущего и ведомого блоков 23, 24, связанных тросом 25, закрепленным в хвостовой части внутренней части 2 стрелы, привод 11 вертикального поворота стрелы, приводы 6 поворота внутренней части стрелы шарнирного звена 17, закрепленные в хвостовой части внутренней части 2 стрелы выполняют частично функцию противовеса.
Гироскопический чувствительный элемент 27 шарнирного звена установлен на шарнирном звене 17 так, что его измерительная ось параллельна горизонтальной оси 19 подвеса шарнирного звена, продольный и вертикальный акселерометры 28, 29, установлены на шарнирном звене 17 так, что их измерительные оси и горизонтальная ось 19 подвеса шарнирного звена взаимно перпендикулярны, гироскопический чувствительный элемент 30 внутренней части стрелы, установленный на внутренней части 2 стрелы так, что его измерительная ось параллельна оси 5 стрелы, поперечный акселерометр 31, установленный на внутренней части 2 стрелы так, что его измерительная ось параллельна оси 19 подвеса шарнирного звена, гироскопический чувствительный элемент 32 всей стрелы установлен так, что его измерительная ось параллельна оси 10 подвеса стрелы, гироскопический чувствительный элемент 33 вертикальной стойки установлен на вертикальной стойке 7 так, что его измерительная ось параллельна оси 15 подвеса вертикальной стойки.
Пульт 34 управления предназначен для формирования на первом выходе 35 сигнала управления горизонтального поворота стрелой вокруг оси 15 подвеса вертикальной стойки и на втором выходе 36 сигнала управления вертикального поворота стрелой вокруг оси 10 подвеса стрелы.
Электронный блок 37 управления горизонтального поворота стрелы имеет два входа, первый из которых 38 соединен с выходом гироскопического чувствительного элемента 33 вертикальной стойки, второй вход 39 соединен с выходом 35 пульта управления, а выход соединен с приводом 16 горизонтального поворота вертикальной стойки.
Электронный блок 40 управления вертикального поворота стрелы имеет три входа, первый из которых 41 соединен с вторым выходом 36 пульта управления вертикального поворота стрелы, второй 42 - с выходом гироскопического чувствительного элемента 32 стрелы, третий вход 43 соединен с выходом вертикального акселерометра 29, а выход соединен с входом привода 11 вертикального поворота стрелы.
Электронный блок 44 управления внутренней части стрелы имеет два входа, первый из которых 45 соединен с выходом поперечного акселерометра 31, второй вход 46 соединен с выходом гироскопического чувствительного элемента 30 внутренней части стрелы 30, а выход соединен с приводом 6 поворота внутренней части стрелы.
Электронный блок 47 управления шарнирного звена имеет два входа, первый из которых 48 связан с выходом продольного акселерометра 28, второй вход 49 связан с выходом гироскопического чувствительного элемента 27 шарнирного звена, а выходом связан с входом привода 21 поворота шарнирного звена.
Дистанционно управляемый гиростабилизированный операторский кран работает следующим образом.
В отсутствие сигналов с пульта 34 управления возможность движения кино-телесъемочной аппаратуры 18 и элементов конструкции крана существует только в результате действия на них внешних возмущающих моментов, например трения в подшипниках и приводах, дебаланса, аэродинамических сил, трения токоподводов и т.д. Поэтому для стабилизации положения шарнирного звена 17 и размещенной на нем кино-телесъемочной аппаратуры 18 необходимо, чтобы с помощью гироскопических чувствительных элементов 32, 27, 30, 33 стрелы, шарнирного звена, внутренней части стрелы и вертикальной стойки соответственно, электронных блоков 37, 40, 44, 47 горизонтального и вертикального поворотов стрелы, внутренней части стрелы и шарнирного звена соответственно и приводов 16, 11, 6, 21 приложить к соответствующим элементам крана моменты, компенсирующие перечисленные выше внешние возмущающие моменты.
При действии на шарнирное звено 17 момента внешних сил вокруг оси 19 подвеса шарнирного звена гироскопический чувствительный элемент 27 шарнирного звена вырабатывает сигнал, подаваемый на второй вход 49 электронного блока 47 управления шарнирного звена. Этот сигнал усиливается указанным блоком и с его выхода подается на вход привода 21 поворота шарнирного звена. Полученный момент посредством механизма параллелограммного типа 22, включающего ведущий блок 23, трос 25 и ведомый блок 24, передается на шарнирное звено 17 и компенсирует момент внешних сил, обеспечивая тем самым неподвижность кино-телесъемочной аппаратуры 18.
При действии на шарнирное звено 17 момента внешних сил вокруг оси стрелы или оси 5 подвеса внутренней ее части он передается через подшипник 20 на внутреннюю часть 2 стрелы, гироскопический чувствительный элемент 30 внутренней части стрелы вырабатывает сигнал, поступающий на второй вход 46 электронного блока 44 управления внутренней части стрелы 44. Этот сигнал усиливается указанным блоком и с его выхода подается на вход привода 6 поворота внутренней части стрелы. Полученный момент через подшипник 20 передается шарнирному звену 17 и компенсирует момент внешних сил, препятствуя изменению положения шарнирного звена 17 в пространстве вокруг оси 5 подвеса внутренней части стрелы и обеспечивая тем самым неподвижность кино-телесъемочной аппаратуры 18.
При действии момента внешних сил на стрелу 1 вокруг оси 10 подвеса стрелы гироскопический чувствительный элемент 32 стрелы вырабатывает сигнал, поступающий на второй вход 42 электронного блока 40 управления вертикального поворота стрелы. Этот сигнал усиливается указанным блоком и с его выхода подается на вход привода 11 вертикального поворота стрелы, развиваемый приводом момент которого компенсирует момент внешних сил, препятствуя колебаниям стрелы 1 вокруг оси 10 подвеса стрелы.
При действии момента внешних сил на стрелу 1 вокруг оси 15 подвеса вертикальной стойки он передается через подшипники 8, 9 на вертикальную стойку 7. Гироскопический чувствительный элемент 33 вертикальной стойки вырабатывает сигнал, поступающий на первый вход 38 электронного блока 37 управления горизонтального поворота стрелы. Этот сигнал усиливается указанным блоком и с его выхода горизонтального поворота поступает на вход привода 16 вертикальной стойки, развиваемый момент которого компенсирует момент внешних сил, препятствуя колебаниям стрелы 1 вокруг оси 15 подвеса вертикальной стойки.
Таким образом, в отсутствие сигналов с пульта 34 управления моменты внешних сил, приложенные к киносъемочной аппаратуре 18 вокруг осей 5 и 19, оси 5 стрелы и оси 19 подвеса шарнирного звена, а также к стреле 1 вокруг оси 10 подвеса стрелы и оси 15 подвеса вертикальной стойки компенсируются, что позволяет исключить колебание кино-телесъемочной аппаратуры 18 и стрелы 1.
При поступлении с второго выхода 36 пульта 34 управления сигнал управления стрелой 1 вокруг оси 10 подвеса стрелы на первый вход 41 управления электронного блока 40 вертикального поворота стрелы он суммируется с выходным сигналом гироскопического чувствительного элемента 32 стрелы, поступающим на первый вход 41 электронного блока 40 управления вертикального поворота стрелы.
В результате, на выходе блока 40 управления вертикального поворота стрелы формируется сигнал, соответствующий повороту системы координат, модулируемой гироскопическим чувствительным элементом 32 стрелы. Этот сигнал подается на вход привода 11 вертикального поворота стрелы, который и разворачивает стрелу 1 вокруг оси 10 подвеса стрелы в точном соответствии с сигналом на втором выходе 36 пульта 34 управления.
При поступлении с первого выхода 35 пульта 34 управления сигнал управления стрелой 1 вокруг оси 15 подвеса вертикальной стойки на второй вход 39 электронного блока 37 управления горизонтального поворота стрелы он суммируется с выходным сигналом гироскопического чувствительного элемента 33 вертикальной стойки, поступающим на первый вход 38 указанного электронного блока. В результате, на выходе этого блока 37 формируется сигнал, соответствующий повороту системы координат, модулируемой гироскопическим чувствительным элементом 33 вертикальной стойки. Этот сигнал подается на вход привода 16 горизонтального поворота вертикальной стойки, которая и разворачивает стрелу 1 вокруг оси 15 подвеса вертикальной стойки в точном соответствии с сигналом на первом выходе 35 пульта 34 управления.
Погрешности гироскопического чувствительного элемента 30 внутренней части стрелы, электронного блока 44 управления внутренней части стрелы, а также внешние возмущающие моменты, приложенные к шарнирному звену 17 и внутренней части 2 стрелы вокруг оси 5 стрелы за длительный промежуток времени, могут вызвать ее разворот вокруг этой оси. Для исключения этого разворота установлен поперечный акселерометр 31, суммирующий отклонения оси 19 подвеса шарнирного звена от плоскости горизонта. С его выхода сигнал подается на первый вход 45 электронного блока 44 управления внутренней части стрелы, суммируется с сигналом на втором входе 46 указанного блока 44, вызывая поворот системы координат, модулируемой гироскопическим чувствительным элементом 30 внутренней части стрелы в сторону, противоположную отклонению оси 19 подвеса шарнирного звена от плоскости горизонта. На выходе электронного блока 44 управления внутренней части стрелы формируется сигнал, подаваемый на вход привода 6 поворота внутренней части стрелы, который разворачивает ее и ось 19 подвеса шарнирного звена в плоскость горизонта.
Погрешности гироскопического чувствительного элемента 27 шарнирного звена, электронного блока 47 управления шарнирного звена, а также внешние возмущающие моменты, приложенные к кино-телесъемочной аппаратуре 18 и шарнирному звену 17 вокруг оси 19 подвеса шарнирного звена за длительный промежуток времени могут вызвать разворот указанных элементов вокруг этой оси. Для исключения этого разворота установлен продольный акселерометр 28, измеряющий отклонения шарнирного звена 17 от плоскости горизонта вокруг оси 19 подвеса шарнирного звена. При указанном отклонении сигнал с выхода продольного акселерометра 28 подается на первый вход 48 электронного блока 47 управления шарнирного звена, суммируется с сигналом на втором входе 49 от гироскопического чувствительного элемента 27 шарнирного звена, вызывая поворот системы координат, модулируемой этим чувствительным элементом в сторону, противоположную отклонению шарнирного звена 17 от плоскости горизонта. На выходе электронного блока 47 управления шарнирного звена формируется сигнал, подаваемый на вход привода 21 поворота шарнирного звена, который посредством механизма 22 параллелограммного типа, включающего ведущий блок 23, передающий крутящий момент на ведомый блок 24, и с помощью троса 25 разворачивает шарнирное звено 17 в плоскость горизонта.
При приложении вертикальных сил к шарнирному звену 17 или к съемочной аппаратуре 18 на выходе вертикального акселерометра 29 появляется сигнал, который после усиления электронным блоком 40 вертикального поворота стрелы поступает на привод 11 вертикального поворота стрелы. В результате действия этого привода в месте крепления шарнирного звена 17 и кино-телесъемочной аппаратуры 18 возникает сила, компенсирующая указанные вертикальные силы. Поэтому вдоль вертикальной оси исключены колебания кино-телесъемочной аппаратуры 18.
Таким образом, предложенная конструкция крана и система автоматического управления его движением позволяют обеспечить пространственную стабилизацию съемочной аппаратуры, повысить точность управления ее движением, что, в свою очередь, обеспечивает стабильность и высокое качество получаемого изображения и горизонтальность кадра при применении любых панорамных головок.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПЕРАТОРСКИЙ КРАН | 2003 |
|
RU2250194C1 |
| ОПЕРАТОРСКИЙ СЕКЦИОННЫЙ ТЕЛЕСКОПИЧЕСКИЙ КРАН | 2004 |
|
RU2281907C1 |
| ОПЕРАТОРСКИЙ КРАН | 2002 |
|
RU2228897C2 |
| КИНО- ИЛИ ТЕЛЕОПЕРАТОРСКИЙ КРАН | 2005 |
|
RU2300128C1 |
| КИНО- ИЛИ ТЕЛЕОПЕРАТОРСКИЙ КРАН | 2016 |
|
RU2619136C1 |
| КИНО- ИЛИ ТЕЛЕОПЕРАТОРСКИЙ КРАН | 2016 |
|
RU2619135C1 |
| Операторский кран с дистанционно управляемой киносъемочной камерой | 1982 |
|
SU1100222A1 |
| Дистанционно управляемый кинооператорский кран | 1984 |
|
SU1217774A1 |
| ОПЕРАТОРСКИЙ КРАН | 1990 |
|
RU2028271C1 |
| Подвесная операторская дорога | 1987 |
|
SU1500535A1 |
Использование: грузоподъемные машины, кино-телеоператорские краны, размещающиеся на различных подвижных носителях: автомобилях, судах и т.п. Сущность изобретения: дистанционно управляемый гиростабилизированный операторский кран содержит стрелу, смонтированную на вертикальной стойке с возможностью вертикального поворота и связанную с вертикальным приводом стрелы. Стрела имеет внутреннюю часть, выполненную с возможностью поворота по оси стрелы и связанную с приводом внутренней части стрелы. Вертикальная стойка установлена на основании с возможностью горизонтального поворота и связана с приводом вертикальной стойки. Шарнирное звено для размещения кино-телесъемочной аппаратуры закреплено на конце внутренней части стрелы с возможностью поворота вокруг оси подвеса шарнирного звена, перпендикулярной оси стрелы и связано с приводом шарнирного звена посредством механизма параллелограммного типа. В хвостовой части стрелы закреплены вертикальный привод стрелы, приводы внутренней части стрелы и шарнирного звена, которые выполняют функцию противовеса. Предусмотрен пульт управления. Все конструктивные элементы крана гиростабилизированы. Движение стрелы крана, съемочной аппаратуры и нагрузки на носитель не зависит от колебания носителя. Ориентация шарнирного звена позволяет при любой панорамной головке получить горизонтальное изображение. 3 з.п. ф-лы, 1 ил.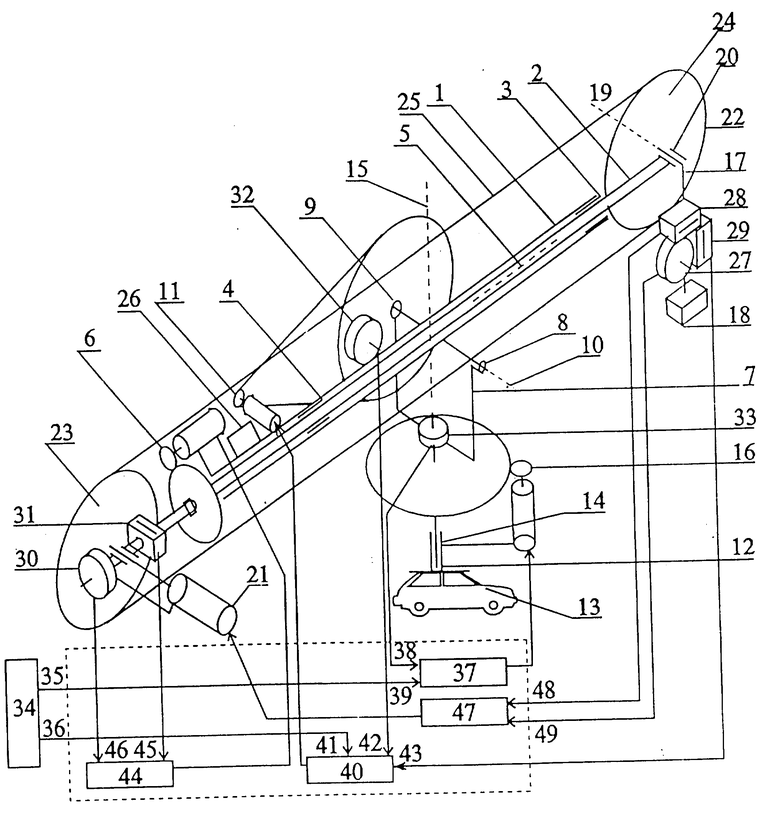
| SU, авторское свидетельство N 1217774, B 66 C 23/72, 1986. |
