Изобретение относитоя к приборостроению и предназначено для подввса оптических приборов, в частности
кинбфотоаппаратов и телекамер, используемых на подвижных объектах.
Известны гидроскопические стабилизаторы, применяемые для стабилизации углрвого положения аэрофотоаппарата Г1.
Известен также трехосный гидроскопический стабилизатор киноаппарата, трехосный карданов подвес которого обеспечивает платформе три угловых степени свободы, содержавши внутреннюю и наружную-карданные рамки, следящий обтекатель и пружины.
Система подвеса этого гиростабилизатора обеспечивает виброизоляцкю платформы в вертикальном направлении при вибрации основания. Для искгоочения влияния внешних возмущений (б основном аэродинамического характера), а также влияния метеоусловий на работу гиростабилизатора в его состав входит специальный следящий защитный обтекатель, имекяоий окно напротив объектива киноаппарата. Поддерживание определенного взаимного положения платформы с киноаппаратом и защитно- .
го обтекателя происходит с помощь следящей системы 2 .
В зтом гиростабилизаторе система подвеса позволяет избавиться от влияния линейной вибрации лишь в одном направлении - вдоль оси подвеса влвдящвго обтекателя. Однгисо, как показывает практика киносъемок с подашкных объектов, направление вибрации
10 в большинстве случаев не совпадает точно с этим направлением и имеет составляющие-, действующие в горизонтальной плоскости. При этом наирольшее влияние на качество изображения 15 оказывает вибрация вдоль Т1оперечной оси гиростабилизатора, вызывапцая смазываниеизобретения. Кроме того, линейная вибрация при наличии необалансировЕШНОсти платформ: и неравяо20жесткости конструкции элементов гиро стабилизатора приводит к воаникио - ;ншо угловой вибрации платформы, такяев снижающей точность стабилизации.
Целью изобретения являето.я повыи« 25 ние точности стабилизации путем жения влияния линейной вибрации.
Цель достигается тем, что в подввв .трехосного гиростабилизатора кииоапарата, содержгицего внутреннюю и наруя
30 ную кардановые рамки, следящий обте-.
катель и пружины, дополнительно введены две пары параллелограмиых механизмов, параллелограмные механизмы каждой пары установлены вдоль поперечной оси стабилизации си1и|метрично . относительно центра подвеса и выполнены в виде подвижно соединенных основания, шатуна и даух кривошипов, причем основания первой пары параллелограммных механизмов закреплены на следящем обтекателе с возможностью перемещения шатуна вдоль вертикальной оси стабилизации киноаппарата, кривошипы этой пары через пружины также соединены со следящим обтекателем, а основания и шатуны второй пары параллограммного механизма выполнены в виде втулок, в каждой из которых установлен с возможностью вргицения вал, ось вращения которого параллельна продольной оси стабилизации киноаппарата, каждый кривошип этой пары соединен с валами этой же пары с возможностью поворота шатуна вокруг поперечной оси стабилизации киноаппарата, причем втулки оснований этой пары соединены с шатунами параллелограмных механизмов первой пары, а втулки каждого шатуна второй пары соединены с наружной карданной рамкой.
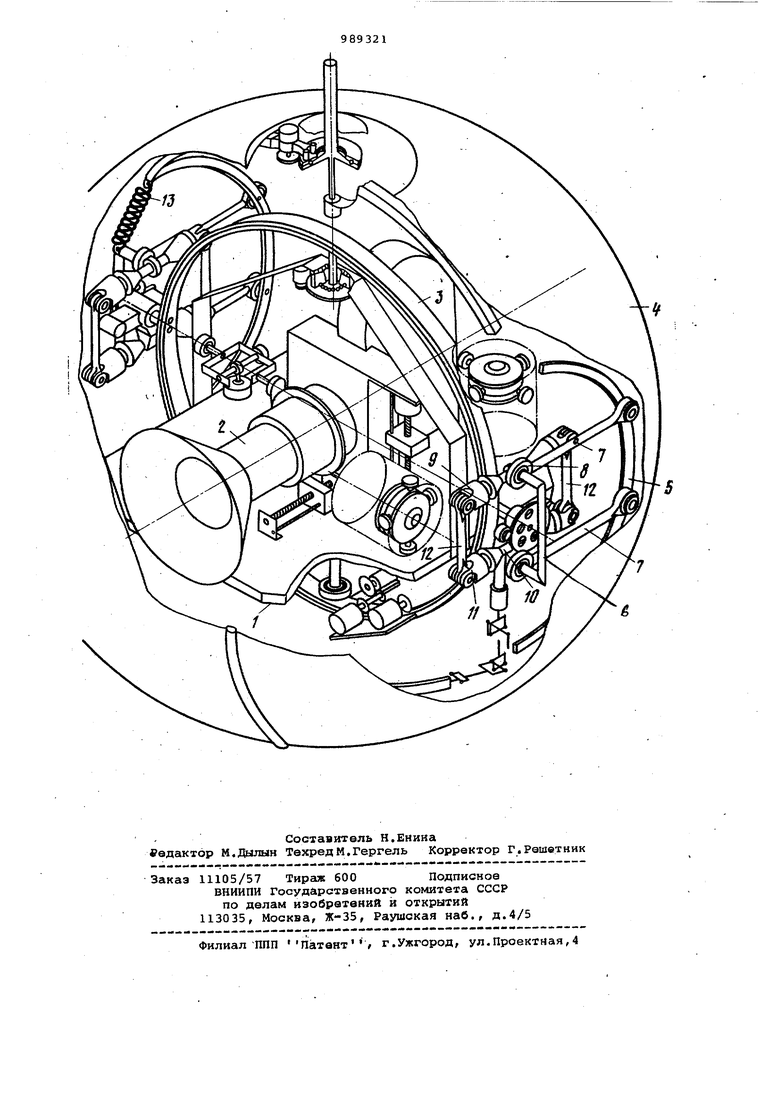
На чертеже изобраикена кинематическая схема гиростабилизатора киноаппа рата.
На платфО1 ме 1 установлен киноаппарат 2, при этом платформа 1 подвешена в наружной карданной рамке 3 и размещена внутри следшцего обтекателя 4. Первая пара параллелограмных механизмов включает основания 5, шатуны б и кривошипы 7, а вторая пара параллелограммных механизмов включает втулки 8 н валы 9 основания, втулки 10 и валы 11 шатунов и кривошипы 12. Пружины 13 соединяют первую пару пapaллeлoгpaIv мныx механизмов с обтв- кателем.
Работа предложенного устройства осуществляется следующим образом.
Пружины 13, прикрепленные одним концом к следящему обтекателю 4, а другим - к верхним кривошипам 7 первой пары параллелс.раммных механизмов г совместно с этой парой образуют систему амортизации вдоль оси, параллельной оси вращения обтекателя (вертикальной оси). Основания 5 первой пары параллелограмммых механизмов установлены также на следящем обтекателе, при этом оси вращения -кривошипов парсшлельн21 поперечной оси стабилизации киноаппарата. С шатунами 6 первой пары параллелограммных механизмов связаны две втулки 10 основания второй пары механизмов, валы которых имеют свободу вращения по оси, парашлвльной продольной оси стабилизации киноаппарата. Кривошипы 12 второй па-.
ры параллелограммных мехлнизмов имеют ось вращения, параллельную поперечной оси стабилизации киноаппарата б, при этом основания этой пары механизмов в отсутствие наклонов обтекателя по поперечной оси занимают горизонтальное положение. Втулки 10 шатунов этой пар)ы закреплены на опорной площадке наружной кардановой рамки 3. Вторая пара парашлелограммных механизмов образует систему амортизации в горизонтальной плоскости, причем параллелограммные механизмы этой пары, образующие собой маятниковую подвеску, аммортизируют платформу в продольном направлении-, а за счет выполнения основания и шатунов в виде втулоки валов амортизируют платформу в поперечном направлении.
Изменение степени демпфирования Ч/солвбанаЯ подвески по всем трем линеййгым координатам может быть легко достигнуто за счет изменения трения в осях вращения кривошипов параллелограммных механизмов и трения между втулками и валами.
Таким образом, с помощью пружинной по; вески по вертикали и маятниковых подвесок в горизонтальной плоскости обеспечивается виброизоляция платформы с рас положен HbjM на ней киноаппаратом по трем ортогональным направлениям т.е. точность стабилизации киноаппарата в линейных координатах повышается. Вместе с тем повышается точность угловой стабилизации за счет снижения линейных вибрационных нагрузок , вызывакяцих угловую вибрацию платформы с расположеннымина ней киноаппаратом и узлами стабилизации.
Применение параллелограммных механизмов и втулок с валами позволяет исключить влияние поворотов кривошипов всех механизмов при работе подвеса на угловое положение опорной площадки наружной кардановой-рамки и, следовательно, не вызывает поворотов кардановых рамок и ошибок стабилизации по углу.
Собственную частоту маятниковой подвески платформы в горизонтальной плоскости с учетом малости моментов инерции кривошипов механизмов можно определить как частоту математическо го маятника
,
где 9 - ускорение свободного падения; К - расстояние от точки подвеса до центра тяжести качакхцейся массы.
Возможность использования этой формулы для определения частоты колебаний. маятниковой подвески объясняется следующим при качке маятниковой подвески параллелограммного типа не происходит поворота карданова подвеса вокруг оси качания, следовательно, момент инерции его не влияет иа чистоту ooii сТВеиных колебаний подвески. Тогда, пренебрегая малыми моментами инерции кривошипов, частоту собственных колебаний подвески можно приближенно определить по приведенной формуле. В этом случае- изменение массы и габа ритов платформы и кардановых рамок, с установленными на них элементами не влечет за собой изменение собственной частоты колебаний подвески, т.е. згшеиа объекта стабилизации не вызывает необходимость регулировки в горизонтальной плоскости, что является достоинством введения предлагаемых элементов подвеса. Кроме того применение подвески параллелограммно го типа и пружин позволяет легко регулировать степень демпфирования колебаний по вертикали за счет измене. трения в сочленениях механизма, а. замена пружин намного легче по Сравнению с известным устройством и производится без существенной разбор ки устройства. За счет применения предложенной (Системы подвеса точность стабилизации по угловым координатам увеличиаа ется в 1,5 раза, повышается качество отснятого материала. Формула изобретения Подвес трехосного гиростабилизаiTopa киноаппарата, содержащий внут1реник о и наружную кардановые рамки, следящкК обтекатель и пружины, о т личающийся тем что, с целью повышения точности стабилиза-. ции киноаппарата путем снижения лпяЛния линейной вибрадни, в него вваданы две пары параллелограмшых Mexaeilaмов, параллелограммиые механизмы каждой пары устаиовлены вдоль попа речной оси стабилизации симметрично относительно центра подвеса и выполйены в виде подвижно соединенных осяо4 вания, шатуна и двух кривошипов, nprtчем основания первой пары пара елограммных механизмов закреплены иа следящем обтекателе с возможностью первмащення шатуна вдоль вертикальной оси стабилизации киноаппарата, кривошипы этой пары через пружины также соединены со следящим обтекателем, а основания и шатуны второй пары параллелограммного механизма выполнены в виде втулок, в кгикдой из которых установлен с возможностью вращення вал, ось вращения которого параллельна продольной оси стабилизации киноаппарата, а каждый кривошип этой пары соединен с валами этой же пары с возможностью поворота шатуна вокруг поперечной оси стабилизации киноаппарата, причем втулки оснований этой пары соединены с шатунами парашлелограммных механизмов первой пары, & втулкикаждого шатуна второй пары соединены с наружной карданиой . рамкой.. Источники информации,, принятые во внимание при экспертизе1. .Бабаев .Стабилизация оптических приборов. Л., Машиностроение, 1975, с. 44. 2. Патент Англии № 1251566, кл. GIF , 1969 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Трехосный гиростабилизатор киноаппарата | 1981 |
|
SU979855A1 |
| Устройство для крепления на корпусе оператора ручного киноаппарата | 1980 |
|
SU920618A1 |
| Устройство для стабилизации оптического изображения киноаппарата | 1983 |
|
SU1113771A1 |
| Комбинированная система ориентации и навигации подвижного объекта | 2020 |
|
RU2746236C1 |
| СПОСОБ УВЕЛИЧЕНИЯ ДИАПАЗОНА УГЛОВ ПОВОРОТА ИЗДЕЛИЯ ОТНОСИТЕЛЬНО ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ, УСТАНОВЛЕННОЙ НА ИЗДЕЛИИ В КАРДАННОВОМ ПОДВЕСЕ | 2013 |
|
RU2552857C1 |
| ТРЕХОСНАЯ ПЛАТФОРМА, СТАБИЛИЗИРОВАННАЯ В ПРОСТРАНСТВЕ | 1964 |
|
SU163761A1 |
| Способ стабилизации гироскопической платформы | 2023 |
|
RU2826509C1 |
| Гиростабилизированная система стабилизации полезной нагрузки беспилотного воздушного судна | 2021 |
|
RU2762217C1 |
| ТРЕХОСНЫЙ ПОДВЕС КАМЕРЫ | 2011 |
|
RU2489747C2 |
| Одноосный силовой горизонтальный гиростабилизатор | 2020 |
|
RU2748143C1 |