(54) ЭЛЕКТРОМАГНИТНЫЙ МЕХАНИЗМ

| название | год | авторы | номер документа |
|---|---|---|---|
| Электромагнитное исполнительное устройство | 1989 |
|
SU1658219A1 |
| Устройство для контроля раствора и провала контактов электромагнитного коммутационного аппарата | 1988 |
|
SU1576924A1 |
| СИСТЕМА ВОЗДУШНОГО ОХЛАЖДЕНИЯ БЛОКОВ ПУСКОТОРМОЗНЫХ РЕЗИСТОРОВ | 2010 |
|
RU2465152C2 |
| Электромагнитный вибратор | 1982 |
|
SU1101973A1 |
| СПОСОБ ВОЗДУШНОГО ОХЛАЖДЕНИЯ БЛОКОВ ПУСКО-ТОРМОЗНЫХ РЕЗИСТОРОВ | 2010 |
|
RU2462603C2 |
| Устройство для контроля подвижной системы электромагнитного аппарата | 1987 |
|
SU1605286A1 |
| Способ управления электромагнитом постоянного тока и устройство для его осуществления Слуцкого | 1989 |
|
SU1725270A1 |
| Устройство для контроля подвижной системы электромагнитного аппарата | 1990 |
|
SU1767567A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРИВОД | 1995 |
|
RU2094877C1 |
| Устройство для управления реостатным торможением двигателей транспортного средства | 1984 |
|
SU1240649A1 |
1
Изобретение относится к электромеханике и может быть применено в устройствах, где для привода исполнительных механизмов используются электромагнитные устройства.
Известен тяговый электромагнит, который состоит из корпуса с обмоткой и якоря 5 с направляющим штоком. В целях увеличения начального и снижения конечного тяговых усилий он содержит дополнительный рабочий шток, соединенный со штоком электромагнита рычагом первого рода, который опирается на опорный элемент с поверхностью, профилированной в соответствии с требуемой тяговой характеристикой 1.
Недостатками этого устройства являются сложность конструкции, большие габариты is и вес, низкий КПД вследствие значительных потерь на рычагах приводного механизма, неравномерность хода рабочего штока, нестабильность формы тяговой характеристики из-за механического износа профилированной поверхности сухаря под действием перекатывающегося по нему нагруженно-, го силами рычага, ограничения в воспроизведении тяговых характеристик сложной формы.:
Известны также электромагнитные механизмы с использованием датчика положения ротора и усилителя мощности 2.
Однако они имеют узкую область использования, например для обеспечения импульсного режима работы.
Цель изобретения - получение разнообразных по форме стабильных тяговых характеристик у различных типов электромагнитов с подвижным якорем.
Указанная цель достигается тем, что датЧИ.К положения якоря выполнен в виде двух переменных резисторов, подвижные токосъемы которых кинематически связаны с якорем электромагнита, усилитель мощности связаны с якорем электромагнита, усилитель мощности связан с клеммами для подключения источника питания через подключенные по реостатной его выходу последовательно соединенные указанные переменные резисторы, точка соединения которых подключена к входу усилителя мощности.
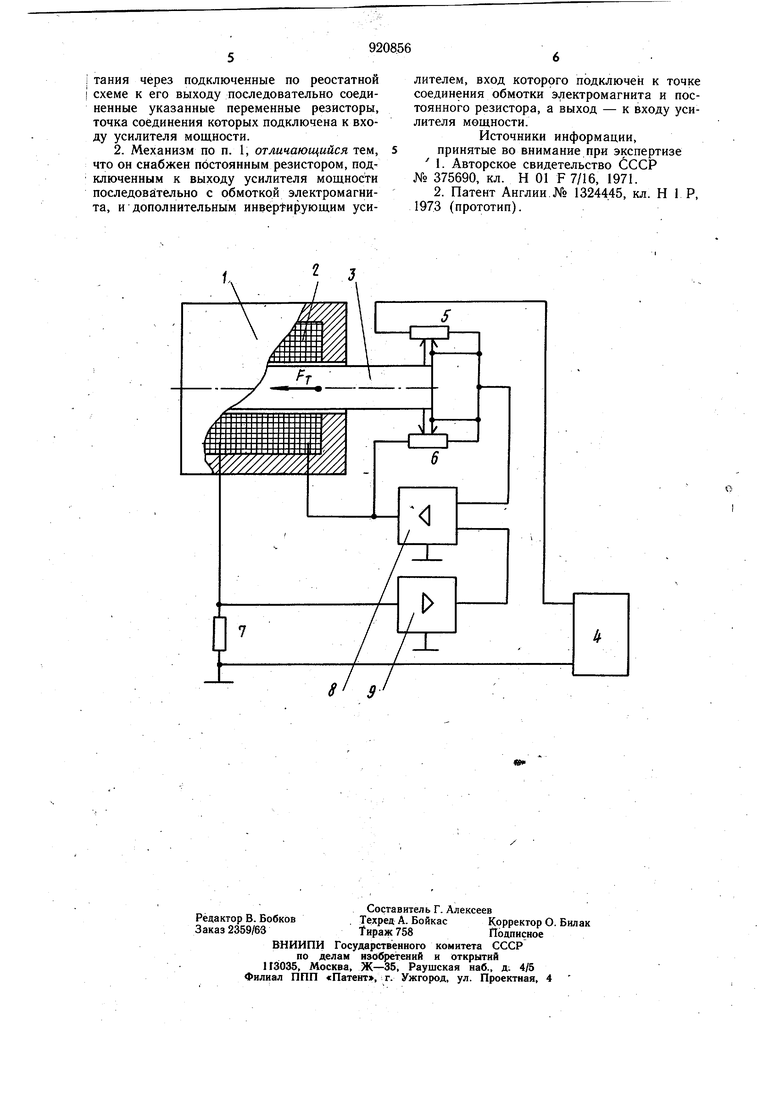
Кроме того, механизм снабжен постоянным резистором, подключенным к выходу усилителя мощности последовательно с обмоткой электромагнита и дополнительного, и дополнительным инвертирующим усили.гелем, вход которого подключен к точке соединения обмотки электромагнита и постоянного резистора, а выход - к выходу усилителя мощности. На чертеже изображена схема предлагаемого электромагнитного механизма. Устройство состоит из электромагнита, включающего корпус 1, обмотку 2 и подвижный якорь 3 источника питающего напряжения 4, переменных резисторов 5 и 6, имеющих сопротивление соответственно Ri и Кг, постоянного резистора 7 с, сопротивлением Rj, усилителя мощности 8 и инвертирующего усилителя 9. Устройство работает следующим образом. С выхода источника питающего напряжения 4 на вход усилителя мощности 8 подается напряжение е, соответствующее требуемой тяговой характеристике. При этом в обмотке 2 электромагнита установится некоторый ток i, создающий тяговое усилие f, уравнение для которого имеет вид: г, 1 ;г at д)Г где - частная производная, учитывающая изменение индуктивности обйотки электромагнита при изменении положения X якоря. Так как основания переменных резисторов 5 и 6 жестко закреплены на корпусе 1 электромагнита, а их подвижные токосъемы кинематически связаны с якорем 3, то при перемещении последнего по определенному закону изменяется коэффициент передачи усилителя мощности 8, определяемый отнощением сопротивлений -, находящихся соответственно в цепи обратной связи и на входе усилителя. При этом с выхода усилителя к обмотке 2 электромагнита приложеноизменяющееся в соответствии с требуемой тяговой характеристикой напряжение, создающее в обмотке ток -fe-. где г - сопротивление обмотки электромагнита по постоянному току; е - напряжение источника питания. Поскольку величина сопротивления г и зависимость индуктивности обмотки L от положения якоря для конкретного типа электромагнита известны и не меняются, то меняя напряжение е на выходе источника,питающего напряжения 4 и устанавливая с помощью переменных резисторов 5 и 6 определенный закон изменения коэффиц1ГеНта передачи усилителя мощности 8 по ходу якоря, можно получить у электромагнита разнооб. разные по форме тяговые характеристики практически любого вида. Для компенсации температурного дрейфа тока в обмотке электромагнита, вызывающего нестабильность формы тяговых характеристик, последовательно с обмоткой 2 включен постоянный эталонный резистор 6, имеющий связь с инвертирующим усилителем 9, подключенным ко входу усилителя мощности 8. В процессе работы устройства на резисторе 6 током i, протекающим в об мотке электромагнита, создается некоторое падение напряжения i-Rj. Инвертированное и последовательно усиленное в k раз сначала инвертирующим усилителем 9, а зате.м усилителем мощности 8 оно суммируется с напряжением, приложенным к обмотке 2 электромагнита и резистору 6, образуя отрицательную обратную связь по току, протекающему в них. Выражение для трка i в обмотке электромагнита при этом имеет 1Ra г (t-t К) RJ ® R, ) где k - коэффициент передачи цепи инвертирующий усилитель - усилитель мощности. Из формулы (3) видно, что выбирая соответствующее значение коэффициента передачи k, можно изменения тока i в обмотке электромагнита, вызванные изменением ее сопротивления г, сделать незначительными даже при значительных разогревах электромагнита. Таким образом, применение предлагаемого электромагнитного механизма позволяет получить у электромагнита разнообразные и достаточно сложные по виду тяговые характеристики. Введение в состав устройства постоянного резистора, включенного последовательно с обмоткой электромагнита, и дополнительного инвертирующего усилителя, реализующих отрицательную обратную связь по току в обмотке электромагнита, позволяет значительно повысить, стабильность воспроизводимых им тяговых характеристик. Формула изобретения 1. Электромагнитный механизм, содержащий электромагнит, состоящий из корпуса, обмотки и подвижного якоря, датчик положения якоря, жестко скрепленный с корпусом электромагнита и связанный с клеммами для подключения источника питания, усилитель мощности, выход которого подключен к обмотке электромагнита, отличающийся тем, что, с целью обеспечения возможности изменения формы и повышения стабильности тяговых характеристик, датчик положения якоря выполнен в виде двух переменных резисторов, подвижные токосъёмы которых кинематически связанц с якорем элект;ромагнита, усилитель мощности связан с клеммами для подключения источника питания через подключенные по реостатной схеме к его выходу последовательно соединенные указанные переменные резисторы, точка соединения которых подключена к входу усилителя мощности.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 375690, кл. Н 01 F 7/16, 1971.
