1
Изобретение относится к автоматике и вычислительной технике и предназначено для использования в автоматизированных системах управления технологическими процессами (АСУ ТП) прокатных станов, в частности в автономных локальных системах управления охлаждением металла.
Известно устройство управления охлаждением горячекатаной полосы спреерного типа, содержащее датчики скорости, толщины и температуры,сифоны с индивидуальным управлением, регуляторы расхода грубого и тонкого регулирования, аналоговую ЭВМ, цифровой заводской компьютер.
Модель охлаждения, т.е. число сифонов и расход через них задается из заводского компьютера. В процессе ускорения стана коррекция производится путем изменения расхода в секции точного регулирования. При невозможности скомпенсировать рассогласование секцией точного регулирования
производится изменение расхода в секциях грубого регулирования до момента, когда полученное рассогласование можно скомпенсировать.этой секцией. В случае получения неудовлетворительного результата производится изменение модели охлаждения 1J.
Однако трудно добиться высокой точности регулирования скорости охлаждения путем изменения расхода жидкости вследствие падения давления в магистралях, наличия примесей в воде, высокой инерционности органов регулирования расхода жидкости.
Наиболее близким к предлагаемому устройству по технической сущности и достигаемому результату является устройство для регулирования температуры заготовки на отводящем рольганге прокатного стана.
20
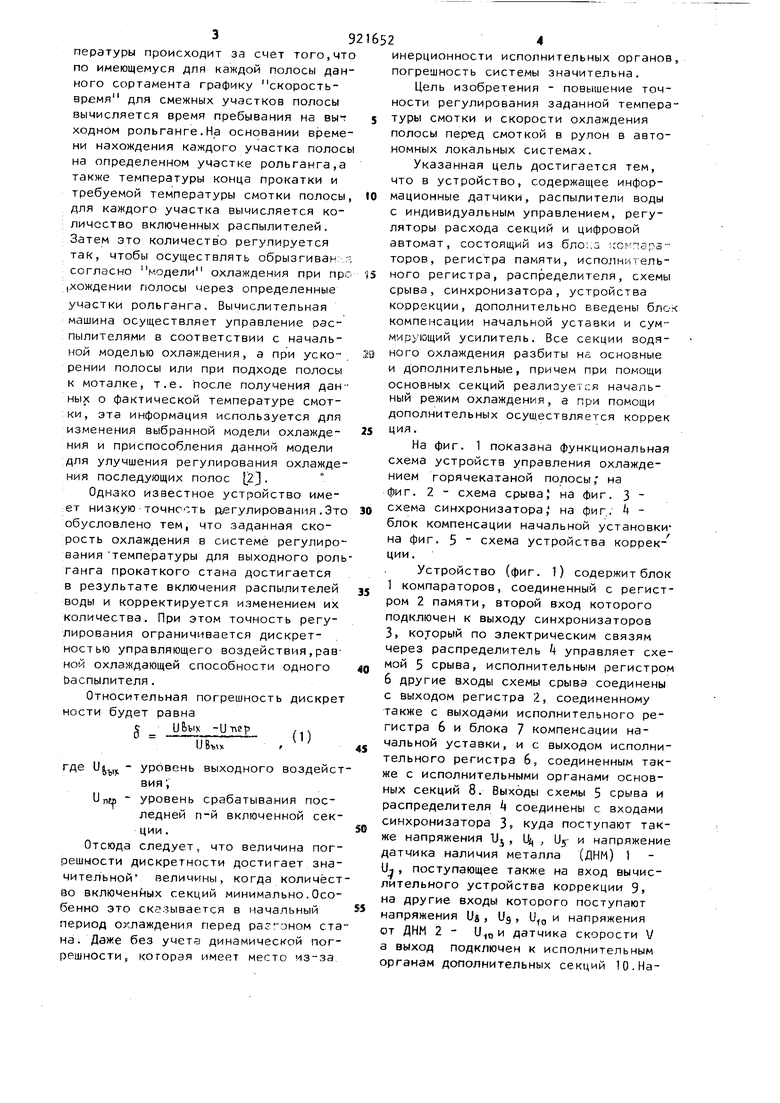
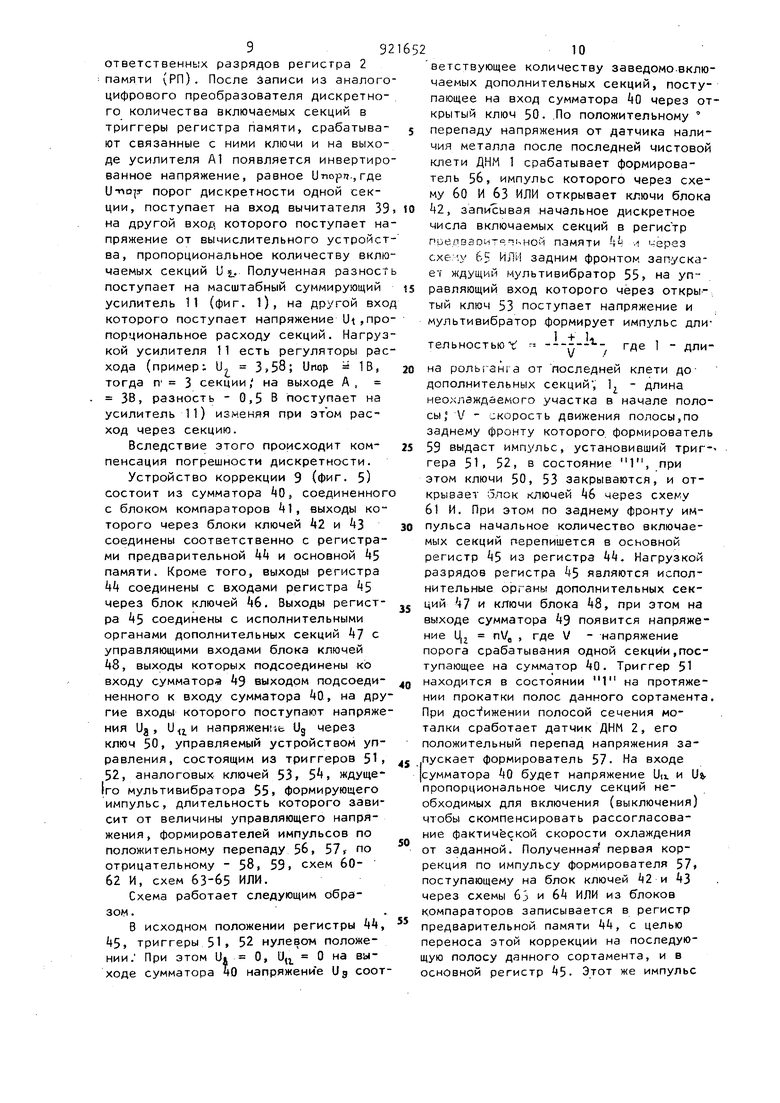
Устройство регулирования температуры содержит информационные датчики распылители воды и управляющую вычис лительную машину. Регулирование тем3пературы происходит за счет того,чт по имеющемуся для каждой полосы дан ного сортамента графику скоростьвремя для смежных участков полосы вычисляется время пребывания на вы-г ходном рольганге.На основании време ни нахождения каждого участка полосы на определенном участке рольганга,а также температуры конца прокатки и требуемой температуры смотки полосы для каждого участка вычисляется количество включенных распылителей. Затем это количествЪ регулируется так, чтобы осуществлять обрызгивай:. согласно модели охлаждения при про ,хождении полосы через определенные участки рольганга. Вычислительная машина осуществляет управление распылителями в соответствии с начальной моделью охлаждения, а при ускорении полосы или при подходе полосы к моталке, т.е. после получения данных о фактической температуре смотки, эта информация используется для изменения выбранной модели охлаждения и приспособления данной модели для улучшения регулирования охлаждения последующих полос 2. Однако известное устройство имеет низкую точность |:1егулирования .Это обусловлено тем, что заданная скорость охлаждения в системе регулирования температуры для выходного роль ганга прокаткого стана достигается в результате включения распылителей воды и корректируется изменением их количества. При этом точность регулирования ограничивается дискретностью управляющего воздействия,равной охлаждающей способности одного эас.пылителя. Относительная погрешность дискрет ности будет равна § ЦЬьх -Цтлер /.ч UBv. , где и, - уровень выходного воздейст вия ; UTTM уровень срабатывания последней п-й включенной секции . Отсюда следует,, что величина noi- решности дискретности достигает значительной величины, когда количест во включенйых секций минимально.Особенно это ска:зыва€;тся в начальный период охлаждения перед ста иа. Даже без учета динамической noi- решности, которая имеет место из-за. 4 инерционности исполнительных органов, погрешность системы значительна. Цель изобретения - повышение точности регулирования заданной температуры смотки и скорости охлаждения полосы перед смоткой в рулон в автономных локальных системах. Указанная цель достигается тем, что в устройство, содержащее информационные датчики, распылители воды с индивидуальным управлением, регуляторы расхода секций и цифровой автомат, состоящий из бло::а ;ссмпзраторов, регистра памяти, исполнительного регистра, распределителя, схемы срыва, синхронизатора, устройства коррекции, дополнительно введены блок компенсации начальной уставки и сумМх1рук)щий усилитель. Все секции водяного охлаждения разбиты на основные и дополнительные, причем при помощи основных секций реализуется начальный режим охлаждения, а при помощи дополнительных осуш.ествляется коррек ция. На фиг. 1 показана функциональная схема устройств управления охлаждением горячекатаной полосы, на фиг. 2 - схема срыва, на фиг. 3 схема синхронизатора, на фиг. блок компенсации начальной установки на фиг. 5 схема устройства коррекции . Устройство (фиг. 1) содержит блок 1 компараторов, соединенный с регистром 2 памяти, второй вход которого подключен к выходу синхронизаторов 3, который по электрическим связям через распределитель Ц управляет схемой 5 срыва, исполнительным регистром 6 другие входы схемы срыва соединены с выходом регистра 2, соединенному также с выходами исполнительного регистра 6 и блока 7 компенсации начальной уставки, и с выходом исполнительного регистра 6, соединенным также с исполнительными органами основных секций 8. Выходы схемы 5 срыва и распределителя 4 соединены с входами синхронизатора 3, куда поступают также напряжения 1) , Ц , j и напряжение датчика наличия металла (ДНМ) 1 Uj, поступающее также на вход вычислительного устройства коррекции 9 на другие входы которого поступают напряжения Us, Ug, и напряжения от ДНМ 2 - датчика скорости V а выход подключен к исполнительным органам дополнительных секций Ю.На59
пряжение U 2. поступает на входы блока компараторов и блока 7 компенсации начальной уставки, выходное напряжение которого суммируется с напряжением и, от вычислителя расхода в сумма торе 11 и включается на регуляторы расхода основных секций 12.
Устройство работает следующим образом.
На вход блока .1 компараторов поступает напряжение U, пропорциональное количеству включенных секций водяного охлаждения соответствующих начальной уставке. На суммирующий усилитель 11 подается напряжение U про порциональное расходу основных секций однозначно связанное математической, зависимостью с количеством секций . ,
. Исходной информацией о начале работы является сигнал датчика наличия металла в последней чистовой клети ДНИ-1. По этому сигналу синхронизатор 3 превращает напряжение U от вычислительного устройства во временной интервал t прохождения неохлаж даемого участка полосы под датчиком температуры конца прокатки (сухая голова).
По окончанию временного-интервала Т, синхронизатор выдает сигнал разрешения записи числа выбранных для включения секций в унитарном коде из блока 1 компараторов, в регистр памяти 2, представляющий собой параллельный N-разрядный регистр (где N - количество секций) информационными входами соединенный с блоком 1 компараторов, входами синхронизации и сброса - с синхронизатором 3. Одновременно на вход вычислительного устройства коррекции 9 подается напряжение Ug соответствующее включению наперед заданного числа включаемых дополнительных секций.При этом из вычислительного числа основных секций вычитается соответствующее число включаемых дополнительных секций. Это распределение секций необходимо для возможности отключения дополнительных секций в случае отрицательной коррекции .
Затем синхронизатор 3 через расчитанную задержку времени t. необходимую для прохождения начала охлаж даемого участка до первой секции .охлаждения (задается величиной напряжения Uw) , выдает импульс на распределитель , представляющий собой
двоичный счетчик, счетный вход и вход Сброса которого соединен с соответствующими выходами синхронизатора 3 и сииейный дешифратор на N+1 число состояний счетчика. При этом на первом выходе распределителя появляется логическая 1 и разрешается перезапись из первого разряда регистра 2 памяти в исполнительный резистор 6, нагрузкой которого есть исполнительные органы основных секций 8.
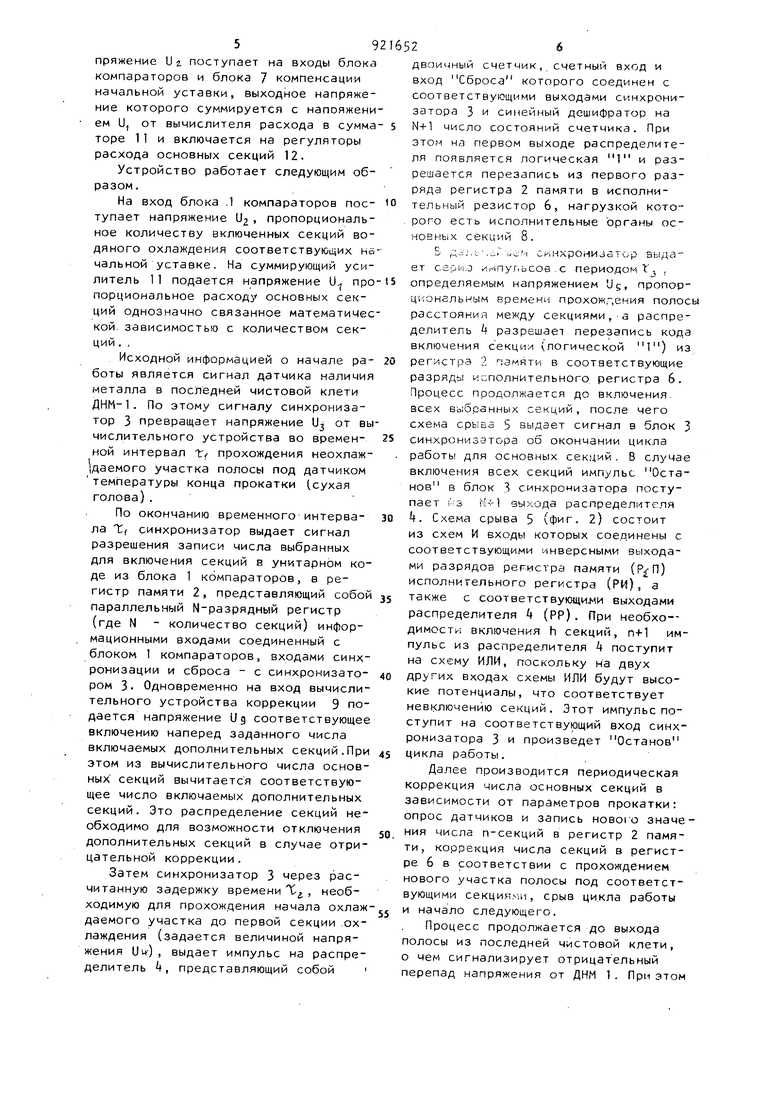
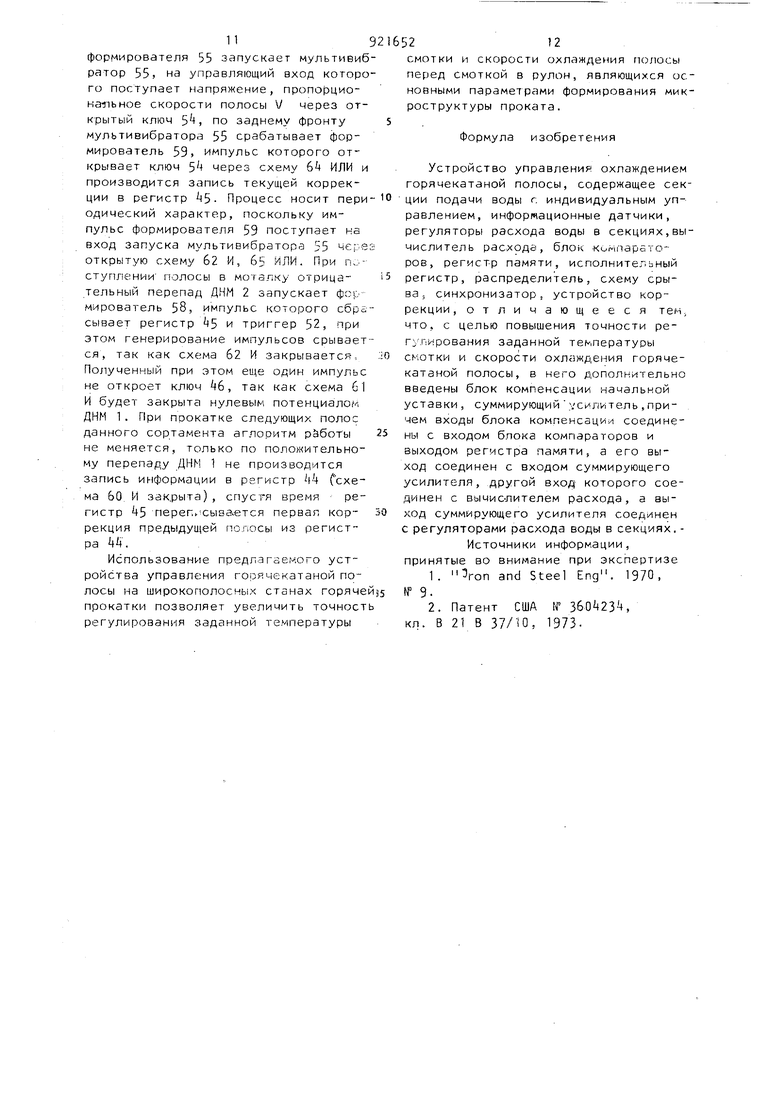
В дс;;,с ,„с:.-1 cиs xpoнизaтop выдает сери.о инпульсов.с периодом t , определяемым напряжением Ug, пропорциональным времени прохож,ения полос расстояния между секциями,а распределитель А разрешает перезапись кода вк.пючения секции (логической 1) из регистра 2 памяти в соответствующие разряды исполнительного регистра 6. Процесс продолжается до включения, всех выбранных секций, после чего схема срыва 5 выдает сигнал в блок 3 синхронизатора об окончании цикла работь для основных секций, В случае включения всех секций импульс Останов в блок 3 синхронизатора поступает iis Н-г выхода распределителя k. Схема срыва 5 (фиг, 2) состоит из схем И входы которых соединены с соответствующими инверсными выходами разрядов регистра памяти () исполнительного регистра (РИ), а также с соответствующими выходами распределителя k (РР). При необхо-димости включения h секций, п+1 импульс из распределителя 4 поступит на схему ИЛИ, поскольку на двух других входах схемы ИЛИ будут высокие потенциалы, что соответствует невключению секций. Этот импульс поступит на соответствующий вход синхронизатора 3 и произведет Останов цикла работы.
Далее производится периодическая коррекция числа основных секций в зависимости от параметров прокатки: опрос датчиков и запись нового значения числа п-секций в регистр 2 памяти, коррекция числа секций в регистре 6 в соответствии с прохождением нового участка полосы под соответствующими секци.ч., срыв цикла работы и начало следующего.
Процесс продолжается до выхода полосы из последней чистовой клети, о чем сигнализирует отрицательный перепад напряжения от ДНМ 1. При этом
792
рывается цикл регулирования, сбрасыаются регистр 2 памяти, распределиель k И через временной интервалт начинается перезапись кода выключения секций (логический 0)из регистра 2 памяти в исполнительный регистр 6 импульсами с периодом из распределителя k. Процесс продолжается до выключения всех секций и устройство становится в исходное состояние.
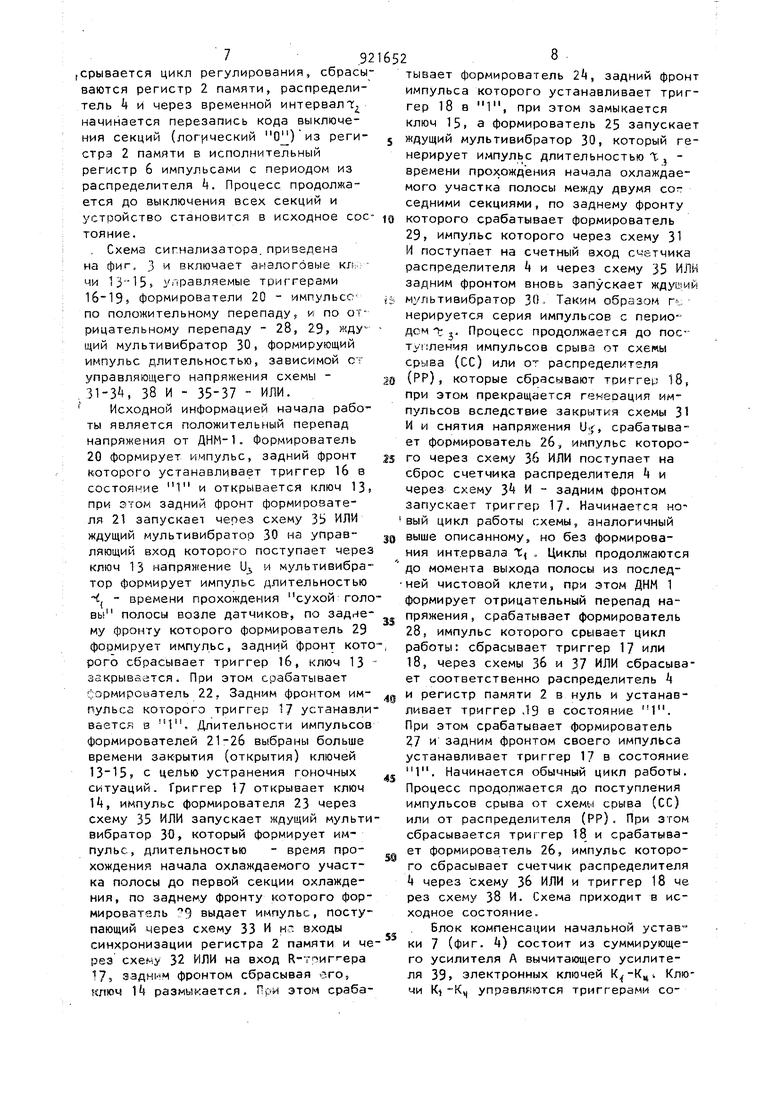
, Схема сигнализатора.приведена на фиг. 3 и включает аналоговые кл;.;чи 13 15 управляемые триггерами 16-19 формирователи 20 - импульсепо положительному перепаду и по отрицательно.му перепаду - 28, 2.9, жду мультивибратор 30, формирующий импульс длительностью, зависимой ст управляющего напряжения схемы 31-3, 38 И - 35-37 - ИЛИ. Исходной информацией начала работы является положительный перепад напряжения от ДНИ-1. формирователь 20 формирует импульс, задний фронт которого устанавливает триггер 1б в состояние 1 и открывается ключ 13f при этом задний фронт формирователя 21 запускает через схему 31з ИЛИ ждущий мультивибратор 30 на управляющий вход которого поступает через ключ 13 напряжение Uj, и мультивибратор формирует импульс длительностью Ч - времени прохождения сухой голо вы полосы возле датчиков-, по заднему фронту которого формирователь 29 формирует импульс, задний фронт кото рого сбрасывает триггер 1б, ключ 13 закрывается. При этом срабатьтает формирователь 22. Задним фронтом импульса которого триггер 17 устанавливается в Ч, .(Длительности импульсов формирователей 21-26 выбраны больше времени закрытия (открытия) ключей с целью устранения гоночных ситуаций. Триггер 17 открывает ключ 14, импульс формирователя 23 через схему 35 ИЛИ запускает ждущий мультивибратор который формирует импульс, длительностью - время прохождения начала охлаждаемого участка полосы до первой секции охлаждения, по заднему фронту которого формирователь 9 выдает импульс, поступающий через схему 33 И из входы синхронизации регистра 2 памяти и через схегйу 32 ИЛИ на вход R-триггера 17 задним фронтом сбрасывая его, ключ i размыкается. При этом сраба6528
тывает формирователь 2, задний фронт импульса которого устанавливает триггер 18 в 1, при этом замыкается ключ 15, а формирователь 25 запускает 5 ждущий мультивибратор 30, который генерирует импульс длительностью %, времени прохождения начала охлаждаемого участка полосы между двумя сог седними секциями, по заднему фронту
10 которого срабатывает формирователь 29, импульс которого через схему 31 И поступает на счетный вход счетчика распределителя 4 и через схему 35 ИЛИ задним фронтом вновь запускает ждугиий
is мультивибратор 30. Таким образом Г-.. нерируется серия импульсов с периодом . Процесс продолжается до поступления импульсов срыва от схеты срыва (СС) или О распределителя
28 (РР)) которые сбрасывают триггер 18, при этом прекращается генерация импульсов вследствие закрытия схемы 31 И и снятия напрях ения Uf, срабатывает формирователь 26, импульс котороS го через схему 36 ИЛИ поступает на сброс счетчика распределителя Ц и через схему 3 И - задним фронтом запускает триггер 17 Начинается цикл работы схемы, аналогичный
39выше описанному, но без формирования интервала 1 . Циклы продолжаются до момента выхода полосы из последней чистовой клети, при этом ДЫМ 1 формирует отрицательный перепад наJ пряжения, срабатывает формирователь
28, импульс которого срывает цикл | работы: сбрасывает триггер 17 или
18, через схемы Зб и 37 ИЛИ сбрасывает соответственно распределитель k
40и регистр памяти 2 в нуль и устанавливает триггер .19 в состояние 1. При этом срабатывает формирователь 27 и задним фронтом своего импульса устанавливает триггер 17 в состояние 1, Начинается обычный цикл работы. Процесс продолжается до поступления импульсов срыва от схемы срыва (СС) или от распределителя (РР). При зтом сбрасывается триггер 18 и срабатывает формирователь 26, импульс которого сбрасывает счетчик распределителя k через схему 36 ИЛИ и триггер 18 че рез схему 38 И. Схема приходит в исходное состояние.
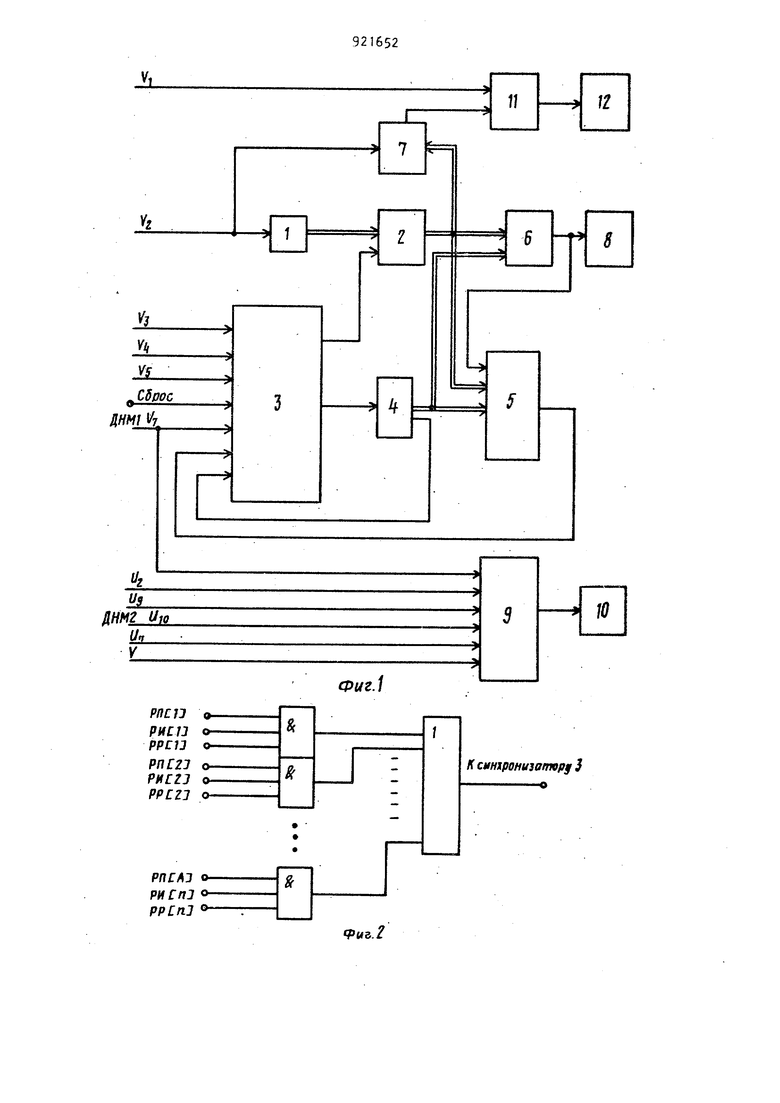
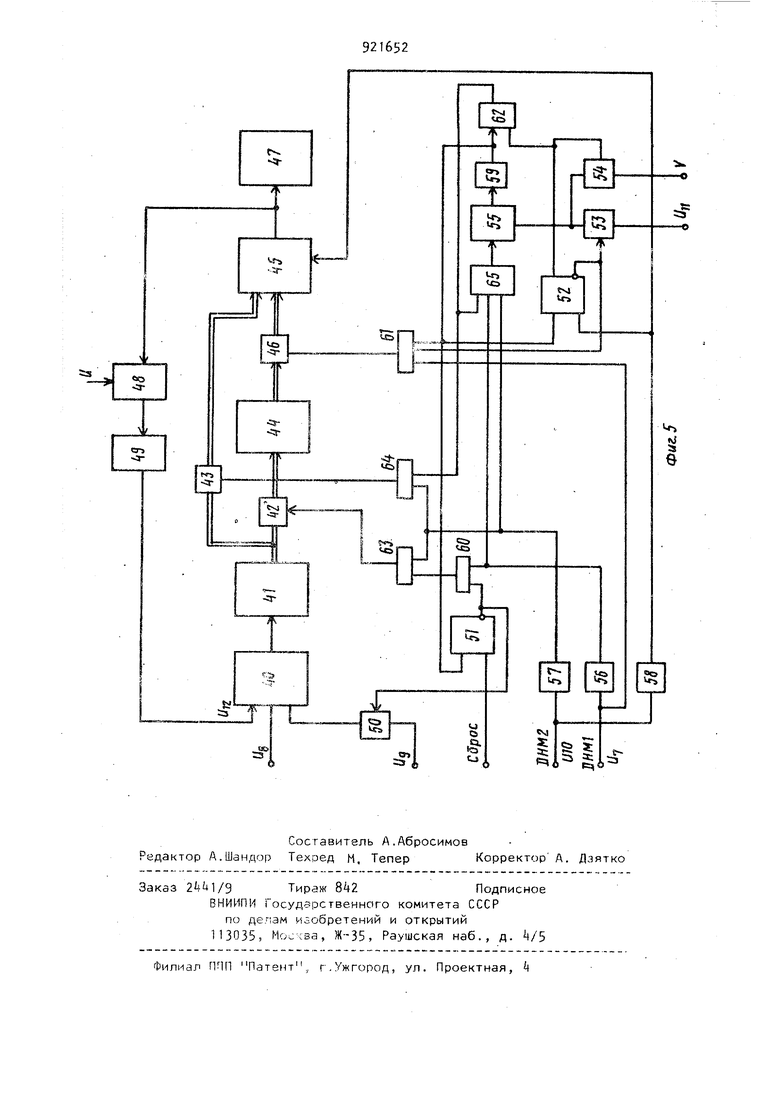
Блок компенсации начальной уставки 7 (фиг. ) состоит из суммирующего усилителя А вычитающего усилителя 39J электронных ключей Ключи К.) -Кц управляются триггерами соответственных разрядов регистра 2 памяти (РП). После записи из аналого цифрового преобразователя дискретного количества включаемых секций в триггеры регистра памяти, срабатывают связанные с ними ключи и на выходе усилителя А1 появляется инвертиро ванное напряжение, равное У-порт., где порог дискретности одной секции, поступает на вход вычитателя 39 на другой вход которого поступает на пряжение от вычислительного устройст ва, пропорциональное количеству вклю чаемых секций и 1. Полученная разност поступает на масштабный суммирующий усилитель 11 (фиг. 1), на другой вхо которого поступает напряжение Ut,про порциональное расходу секций. Нагруз кой усилителя 11 есть регуляторы рас хода (пример; и Utiop i IB, тогда п 3 секции/ на выходе А, ЗВ, разность - 0,5 В поступает на усилитель 11) изменяя при этом рас™ ход через секцию. Вследствие этого происходит компенсация погрешности дискретности. Устройство коррекции 9 (фиг. 5) состоит из сумматора , соединенног с блоком компараторов 41, выходы ко торого через блоки ключей А2 и 3 соединены соответственно с регистрами предварительной kk и основной 45 памяти. Кроме того, выходы регистра kf соединены с входами регистра k через блок ключей Ц6. Выходы регистра kS соединены с исполнительными органами дополнительных секций 47 с управляющими входами блока ключей 48, выходы которых подсоединены ко входу сумматора 49 выходом подсоединенного к входу сумматора 40, на дру гие входы которого поступают напряже ния Ug , Uu напряжеж.ь Ug через ключ 50, управляемый устройством управления, состоящим из триггеров 51 52, аналоговых ключей 53 54, ждуще1го мультивибратора 55 формирующего импульс, длительность которого зависит от величины управляющего напряжения, формирователей импульсов по положительному перепаду 5б 57f по отрицательному - 58, 59 схем 6062 И, схем 63-65 ИЛИ. Схема работает следующим образом . В исходном положении регистры 44, 45, триггеры 51 , 52 нулевом положении. При этом и. О, Uj О на выходе сумматора 40 напряжение Ug соот910 ветствующее количеству заведомо-включаемых дополнительных секций, поступающее на вход сумматора 40 через открытый ключ 50. .По положительному перепаду напряжения от датчика наличия металла после последней чистовой клети ДНИ 1 срабатывает формирователь 5б, импульс которого через схему 60 И 63 ИЛИ открывает ключи блока 42, записывая начальное дискретное числа включаемых секций в регистр преоэаоитят ной памяти ч .- через схе;у 65 ИЛИ задним фронтом запускает ждущий мультивибратор 55 на управляющий вход которого через открытый ключ 53 поступает напряжение и мультивибратор формирует импульс длительностью Y . где - длина рольганга от последней клети додополнительных секций , 1 - длина неохлаждаемого участка в начале полосы, V - скорость движения полосы,по заднему фронту которого, формирователь 59 выдаст импульс, установивший триг- гера 51. 52, в состояние 1, при этом ключи 50, 53 закрываются, и открывает блок ютючей 46 через схему 61 И, При этом по заднему фронту импульса начальное количество включаемых секций перепишется в основной регистр 45 из регистра 44. Нагрузкой разрядов регистра 45 являются исполнительные органы дополнительных секций 4 и ключи блока 48, при этом на выходе сумматора 4Э появится напряжение Ц , где V - -напряжение порога срабатывания одной секции,поступающее на сумматор 40. Триггер 51 находится в состоянии 1 на протяжении прокатки полос данного сортамента. При дос ижении полосой сечения моталки сработает датчик ДНИ 2, его положительный перепад напряжения запускает формирователь 57. На входе сумматора 40 будет напряжение Uix и U. пропорциональное числу секций необходимых для включения (выключения) чтобы скомпенсировать рассогласование фактической скорости охлаждения от заданной. Полученная первая коррекция по импульсу формирователя 57 поступающему на блок ключей 42 и 43 через схемы 63 и 64 ИЛИ из блоков компараторов записывается в регистр предварительной памяти 44, с целью переноса этой коррекции на последующую полосу данного сортамента, и в основной регистр 45. Этот же импульс
формирователя 55 запускает мультивибратор 55, на управляющий вход которого поступает напряжение, пропорционат1ьное скорости полосы V через открытый ключ 5 по заднему фронту мультивибратора 55 срабатывает формирователь 39, импульс которого открывает ключ 5- через схему 6А ИЛИ и производится запись текущей коррекции в регистр 5- Процесс носит периодический характер, поскольку импульс формирователя 59 поступает на вход запуска мультивибратора 55 череа открытую схему б2 И, б5 ИЛИ. При п ;ступлении полосы в моталку отрицательный перепад ДНИ 2 запускает фор мирователь 58, импульс которого сбрасывает регистр S и триггер 52, при этом генерирование импульсов срывается, так как схема б2 И закрывается, Полученный при этом еще один импульс не откроет ключ 6, так как схема 61 И будет закрыта нулевым потенциалог, ДНМ 1. При прокатке следующих полос данного сортамента аглоритм работы не меняется, только по положительному перепаду ДНИ 1 не производится запись информации в регистр f4 fcxeма 60. И закрыта) , спустя время регистр 5 переп сыва«ется перваг, коррекция предыдущей полосы из регистра 44.
Использование предлагаемого устройства управления горячекатаной полосы на широкополосных станах горячей прокатки позволяет увеличить точность регулирования заданной температуры
смотки и скорости охлаждения полосы перед смоткой в рулон, являющихся основными параметрами формирования микроструктуры проката.
Формула изобретения
Устройство управления охлаждением горячекатаной полосы, содержащее секции подачи воды г индивидуальным управлением, информационные датчики, регуляторы расхода воды в секциях,вычислитель расхода, блок компараторов, регистр памяти, исполнительный регистр, распределитель, схему срыва , синхронизатор, устройство коррекции, отличающееся тем, что. с целью повышения точности регулирования заданной температуры смотки и скорости охлаждения горячекатаной полосы, в него дополнительно введены блок компенсации начальной уставки, суммирующийусилитель,причем входы блока компенсации соединены с входом блока компараторов и выходом регистра памяти, а его выход соединен с входом суммирующего усилителя, другой вход которого соединен с вычислителем расхода, а выход суммирующего усилителя соединен с регуляторами расхода воды в секциях. Источники информации, принятые во внимание при экспертизе
1. and Steel Eng. 1970,
№ 9.
2.Патент США If Зб04234, кл. 8 21 В 37/10, 1973.
J
к синхронизатору J
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления охлаждением горячекатаной полосы | 1981 |
|
SU952397A1 |
| Устройство коррекции скорости охлаждения горячекатаной полосы | 1980 |
|
SU900296A1 |
| Устройство коррекции скорости охлаждения горячекатаной полосы | 1980 |
|
SU931255A1 |
| Устройство управления ускоренным охлаждением проката | 1987 |
|
SU1507483A1 |
| Способ управления ускоренным охлаждением проката и устройство для его осуществления | 1988 |
|
SU1547901A1 |
| Устройство для подгонки пленочных микроузлов | 1976 |
|
SU661617A1 |
| Устройство для воспроизведения мно-гОКАНАльНОй МАгНиТНОй зАпиСи | 1979 |
|
SU836662A1 |
| Устройство для контроля сложных объектов | 1987 |
|
SU1509833A1 |
| Цифровой измеритель задержки | 1980 |
|
SU930219A2 |
| Устройство для измерения перекоса ленточного носителя записи | 1987 |
|
SU1522283A1 |

РПГАЗ oРИСП oPPCn oУЛ JL
От MHMIfff
У,
И
irSi
к распреZ 31
делите Л ю
n
Крегистр 2
. cc
в-
fj
PP.
с, Spec
п
с
Сброс рвспреа
«
с вем1пеля 4
(
регистра
Р,ПШ
Kegnnaimfgtl
