(54) УСТРОЙСТВО УПРАВЛЕНИЯ УРАВНОВЕШЕННЫМ ПОДЪЕМНИКОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод | 1977 |
|
SU684167A1 |
| Регулятор давления газа | 1980 |
|
SU932473A1 |
| Механопневматический преобразователь | 1979 |
|
SU996749A1 |
| Система управления грузоподъемным средством | 1980 |
|
SU893824A1 |
| Пневматический повторитель | 1979 |
|
SU912956A2 |
| Пневматический повторитель давления | 1979 |
|
SU846809A2 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| Устройство для регулирования соотношения расходов двух смешиваемых потоков | 1982 |
|
SU1062658A1 |
| Регулятор давления потока газа | 1978 |
|
SU744495A1 |
| Регулятор давления газа | 1979 |
|
SU922674A1 |
1
Изобретение относится к подъе.мно-транспортному машиностроению, а именно к пневматическим системам управления для уравновешенных подъемников.
Известно устройство управления уравновешенного подъемника, содержащее одно- 5 каскадный пневматический датчик веса и однокаскадный повторитель 1.
Чувствительность системы управления крайне низкая, что объесняется:его однокаскадностью, наличием клапанного элемен- д та и отсутствием собственного расхода воздуха./
Известна также система управления уравновешенного подъемника, содержащая корпус, в KOTOpQM установлен пневматический датчик веса, выполненной из основнь1х 15 проточных камер, первая из которых выходным каналом соединена с каналом управления и через дроссель подключена к линии магистрали, а вторая основная проточная камера соединена с линией выход-а, jo причем основные проточные камеры соединены между собой через основное сопло с которым соединена основная заслонка, расположенная между кинематической передачей, соединенной с грузозахватным органом подъемника, и второй основной проточной камерой, а также однокаскадный повторитель, выполненный с магистральным и атмосферным KJfanaiWbiMH узлами и замкнутой камерой управления, соединенной с каналом управления, и с камерами выходного канала питания, соединенными соответственно с линией выхода и линией магистрали 2.,
Недостатками известного устройства являются сравнительно низкие динамические и энергетические свойства системы.
Цель изобретения - улучшение эксплуатационных качеств путем повышения динамических и энергетических свойств устройства.
Указанная цель достигается тем, что устройство снабжено Дополнительными проточными камерами, первая из которых сообщена с атмосферой, а вторая дополнительная проточная камера соединена с линией выхода, дополнительным соплом, установленным между дополнительными проточными камерами, подпружиненной заслонкой, соединенной с дополнительным соплом и расположенной между первой основной проточной камерой и второй дополнитель-
ной проточной камерой, при этом упомянутая кинематическая передача выполнена с дискретным регулятором передаточного отношения.
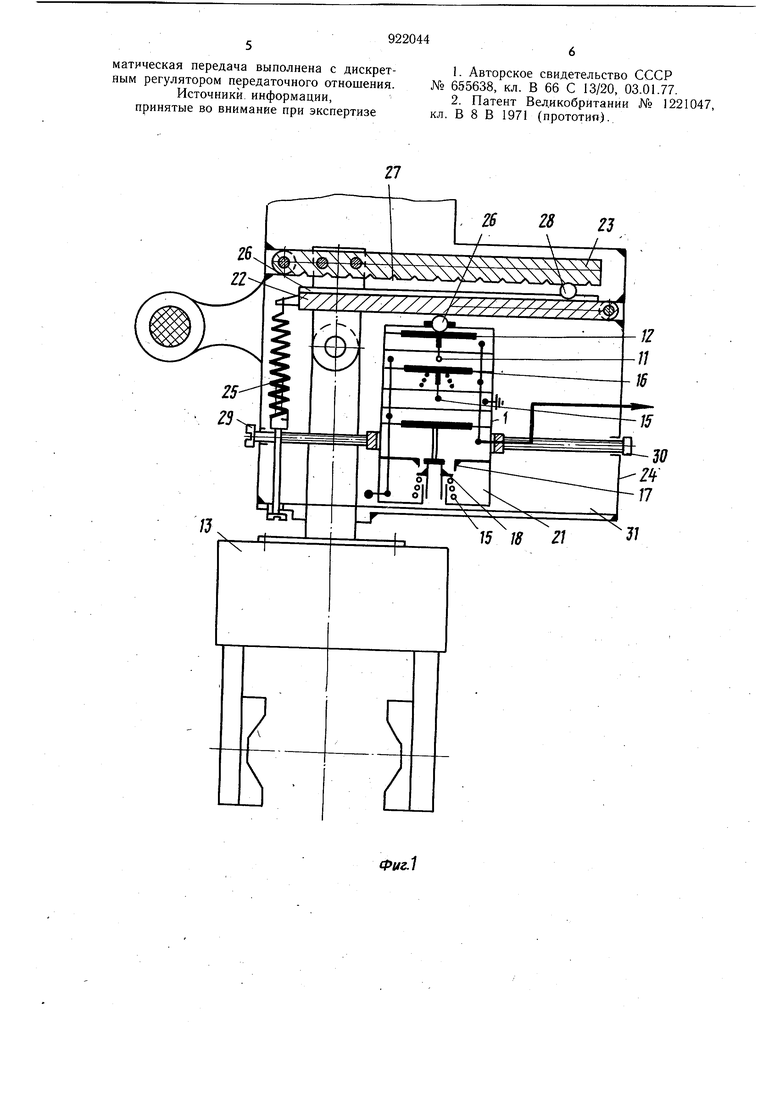
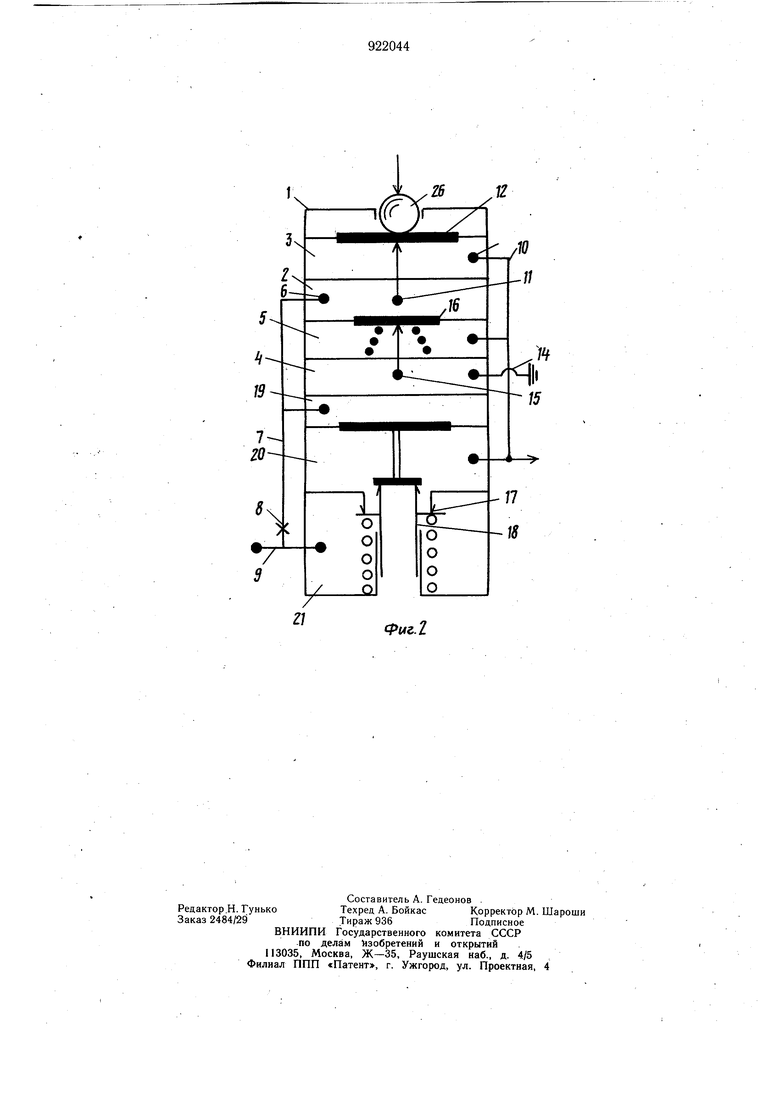
На фиг. 1 изображено устройство управления уравновешенным подъемником; на фиг. 2 - схема датчика веса и однокаскадного повторителя.
Устройство управления уравновешенным подъемником содержит корпус 1, в котором установлен датчик веса, выполненный в виде основных 2 и 3 и дополнительных 4 и 5 проточных камер. Первая основная проточная камера 2 выходным каналом 6 соединена с каналом 7 управления и через дроссель 8 подключена к линии 9 магистрали, а вторая основная проточная камера 3 соединена с линией 10 выхода,.причем камеры 2 и 3 соединены между собой через основное сопло 11, с которым соединена основная заслонка 12, расположенная между кинематической передачей, соединенной с грузозахватным органом 13 подъемника и камерой 3. Первая дополнительная проточная камера 4 соединена с атмосферой через линию 14, а вторая дополнительная проточная камера 5 соединена с линией 10 выхода. Дополнительное сопло 15 установлено между камерами 4 и 5 и соединено с подпружиненной заслонкой 16, расположен«ой между камерами 2 и 5. .Однокаскадный. повторитель выполнен с магистральным 17 и атмосферным 18 клапанными узлами и замкнутой камерой 19 управления, соединенной с каналом 7 управления. Камеры 20 и 21 выходного канала и питания соединены соответственно с линией 10 выхода и линией 9 магистрали.
Упомянутая кинематическая передача, соединенная с грузозахватным органом 13, выполнена с дискретным регулятором передаточного отношения, который может состоять из рычагов 22 и 23, шарнирно закрепленных на корпусе 24. Рычаг 22 соединен с регулируемой пружиной 25 и первым шариком 26, сопряженным с заслонк,ой 12. Рычаг 23Выполнен с гнездами 27. Второй шарик 28 расположен в гнезде 27 и поддерживается направляюш,ими. В средней части рычага 23 подвешен rpy3O3axBatHb№ орган 13 подъемника. Плавное перемещение корпуса 1 осуществляется с -помощью винтов 29 и 30 по направляющей 31.
Устройство управления уравновешенным подъемникомработает следующим образом.
Соответствующим расположением шарика 28 дискретно регулируют передаточное отношение кинематической передачи, соединенной с грузозахватным органом 13 Плавное изменение передаточного отношения производят с помощью винтов 29 и 30, перемещая корпус 1 по. направляющей 31. Изменением передаточного отношения осуществляют согласование веса груза с, давлением воздуха на линии 10 выхода, при этом подъемник уравновешивается. В проточных камерах 2-5 устанавливается соответствующее давление. При незначительном изменении, например, из-за динамических процессов усилия на заслонке 12 или давления в ,.,линии 10, воспринимающей вес груза, равновесие системы- восстанавливается за счет изменения давления в линии 10
за счет камеры 3, или камер 3 и 5, при этом клапанные узлы 17 и 18 не открываются. При значительном изменении усилия на заслонке 12 или давления в л.иний 10 включаются в работу ТКлапанные узлы 17 и 18 и давление в линии 10 быстро изменяется до значения, при котором подъемник уравновешивается.
Устройство управления уравновешенным подъемником из-за возможности уменьшения объема проточных камер имеет повышенные энергетические свойства, благодаря повышенной чувствительности к изменению веса груза повышаются и динамические свойства системы.
25
Формула изобретения
Устройство управления уравновешенным подъемником, содержащее корпус, в котором установлен пневматический датчик веса, выполненный из основных проточных камер, первая из которых выходным каналом соединена с каналом управления и через дроссель подключена к линии магистрали, а вторая основн ая проточная камера соединена с линией выхода, причем основные проточные камеры соединены между собой через основное сопло, с которым соединена основная заслонка, расположенная между кинематической передачей, соединенной с грузозахватным органом подъемника, и второй основной проточной камерой, а также Однокаскадный повторитель, выполненный с магистральным и атмосферным клапанными узлами и замкнутой камерой управления, соединенной с каналом управления, и с камерами выходного канала питания, соединенными соответственно с линией выхода и линией магистрали, отличающееся тем, что, с целью улучшения эксплуатационных качеств путем повышения динамических и энергетических свойств, оно снабжено дополнительными проточными камерами, первая из которых сообщена с атмосферой, а вторая дополнительная проточная камера соединена с линией выхода, дополнительным соплом, установленным между дополнительными проточными камерами, подпружиненной заслонкой, соединенной с дополнительным соплом и расположенной между первой основной проточной камерой и второй дополнительной проточной камерой, при этом упомянутая кинемагическая передача выполнена с дискретным регулятором передаточного отношения.
Источники, информации, принятые во внимание при экспертизе
