Изобретение относится к подъемно-транспортному машиностроению, а именно к системам управления уравновешивающих подъемников.
Цель изобретения - повышение безопасности работы подъемника.
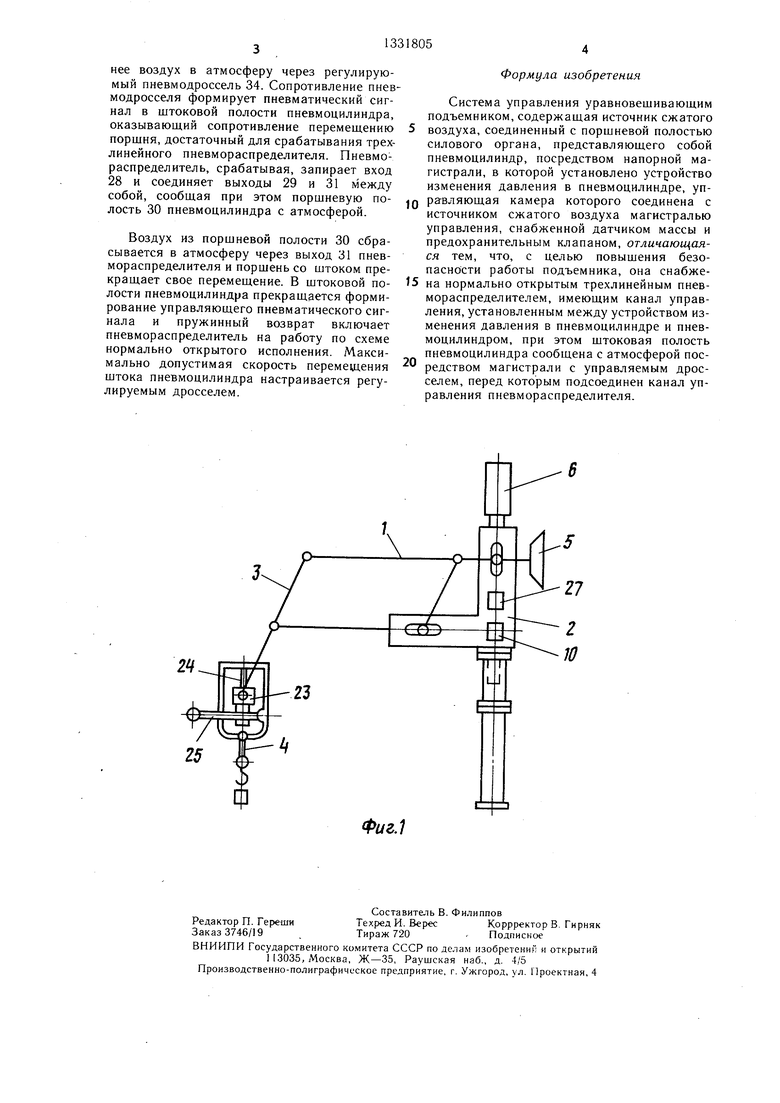
На фиг. 1 показана принципиальная схема уравновешиваюшего подъемника; на фиг. 2 - принципиальная схема системы управления уравновешиваюш,им подъемником.
Уравновешиваюш,ий подъемник содержит грузовую стрелу 1 в виде шарнирного параллелограмма, закрепленную на стойке 2. На стреле закреплен грузовой рычаг 3, на конце которого размещен грузозахватный орган 4. На противоположном конце стрелы закреплен противовес 5. Грузовая стрела связана с силовым органом, например, пневмоцилиндром 6. Пневмоцилиндр 6 соединен напорной магистралью 7 с источником 8 сжатого воздуха. В напорной магистрали установлены обратный клапан 9 и устройство 10 изменения давления в пневмоцилиндре.
Устройство изменения давления содержит управляющую камеру 11, мембрану 12, взаимодействующую с толкателями 13 и 14, клапаны 15 и 16, удерживаемые пружинами 17 и 18, камеры 19-21. От напорной магистрали ответвляется магистраль 22 управления, в которой установлен датчик 23 массы. Датчик массы содержит чувствительный элемент 24, взаимодействующий с г рузозахватным органом, и рукоятку 25 управления. В магистрали управления за датчиком массы установлен предохранительный клапан 26.
В напорной магистрали между устройством изменения давления и пневмоцилиндром установлен нормально открытый трехлинейный пневмораспределитель 27 с каналом управления и пружинньЕм возвратом. Вход 28 пневмораспределителя соединен магистралью с камерами 19-21 устройства изменения давления, а выход 29 - с поршневой полостью 30 пневмоцилиндра. Выход 31 нневмораснределителя соединен с атмосферой. 1Итоковая полость 32 пневмоцилиндра соединена с атмосферой магистралью 33, в которой установлены регулируемый дроссель 34 и канал 35 управления пневмораспредели- телем.
Система управления уравновешивающим подъемником работает следующим образом.
Масса грузозахватного органа 4 без груза или с грузом уравновешивается усилием пневмоцилиндра 6, развиваемым за счет давления рабочего тела. Автоматическое уравновешивание, т. е. управление давлением рабочего тела в пневмоцилиндре, осуществляется от датчика 23 массы следующим образом.
Рабочее тело, в частности сжатый воздух, через обратный клапан 9 поступает в напорную магистраль 7 и магистраль 22 управления. При подъеме груза оператор прикладывает усилия к рукоятке 25 управления вверх, воздействуя через грузозахватный орган на чувствительный элемент 24 датчика массы. Одновременно на чувствительный элемент воздействует сила Р, зависящая от массы груза и грузозахватного органа.
В зависимости от силы Р датчик массы пропускает определенную порцию воздуха в управляющую камеру 11 устройства 10 изменения давления, в результате чего мем5 брана 12 перемещает толкатель 13 в сторону клапана 15. Последний открывается и пропускает воздух в камеру 19, а из нее через нормально открытый трехлинейный пневмораспределитель 27 в поршневую полость 30 пневмоцилиндра и в камеры 20
и 21, пока давление во всех камерах не сравняется. При равном давлении в камерах толкатель 13 под действием пружины 17 возвращается в исходное положение, клапан 15 закрывается и прекращает подачу воздуха.
5
При перемещении грузозахватного органа 4 оператором за рукоятку 25 управления к заданному месту пневмосистема отслеживает это движение, уравновешивая массу груза усилием пневмоцилиндра 6 в каж- 0 дой точке траектории движения.
При опускании груза оператор прикладывает усилие к рукоятке 25 управления вниз, воздействуя через грузозахватный орган на чувствительный элемент датчика 5 массы. Датчик массы при этом сбрасывает воздух в атмосферу из управляющей камеры 11 устройства изменения давления. В результате уменьщения давления в камере 11 мембрана 12 перемещает толкатель 14
0
в сторону клапана 16, последний открывается и пропускает воздух из камеры 21 в атмосферу. Истечение воздуха из поршневой полости 30 пневмоцилиндра через камеру 21 в атмосферу происходит до тех пор, пока давление в камерах 11 и 20 не сравняется.
5 При равном давлении в камерах 11 и 20 толкатель 14 под действием пружины 18 возвращается в исходное положение, клапан 16 закрывается и прекращает истечение воздуха в атмосферу.
Для предотвращения резкого взмывания
0 стрелы при обрыве груза с грузозахватного органа в систему включен нормально открыть й трехлинейный пневмораспреде- 27 с каналом управления и пружинным возвратом, работающий следующим о.б- разом.
5
При резком снятии нагрузки со штока пневмоцилиндра 6 поршень перемещается в сторону штоковой полости 32, вытесняя из
нее воздух в атмосферу через регулирую- мый пневмодроссель 34. Сопротивление пнев- модросселя формирует пневматический сигнал в штоковой полости пневмоцилиндра, оказывающий сопротивление перемещению порщня, достаточный для срабатывания трехлинейного пневмораспределителя. Пневмо- распределитель, срабатывая, запирает вход 28 и соединяет выходы 29 и 31 между собой, сообщая при этом поршневую полость 30 пневмоцилиндра с атмосферой.
Воздух из поршневой полости 30 сбрасывается в атмосферу через выход 31 пневмораспределителя и поршень со штоком прекращает свое перемещение. В штоковой полости пневмоцилиндра прекращается формирование управляющего пневматического сигнала и пружинный возврат включает пневмораспределитель на работу по схеме нормально открытого исполнения. Максимально допустимая скорость перемещения штока пневмоцилиндра настраивается регулируемым дросселем.
Формула изобретения
Система управления уравновешивающим подъемником, содержащая источник сжатого
воздуха, соединенный с поршневой полостью силового органа, представляющего собой пневмоцилиндр, посредством напорной магистрали, в которой установлено устройство изменения давления в пневмоцилиндре, управляющая камера которого соединена с источником сжатого воздуха магистралью управления, снабженной датчиком массы и предохранительным клапаном, отличающаяся тем, что, с целью повышения безопасности работы подъемника, она снабжена нормально открытым трехлинейным пнев- мораспределителем, имеющим канал управления, установленным между устройством изменения давления в пневмоцилиндре и пнев- моцилиндром, при этом штоковая полость пневмоцилиндра сообщена с атмосферой посредством магистрали с управляемым дросселем, перед которым подсоединен канал управления пневмораспределителя.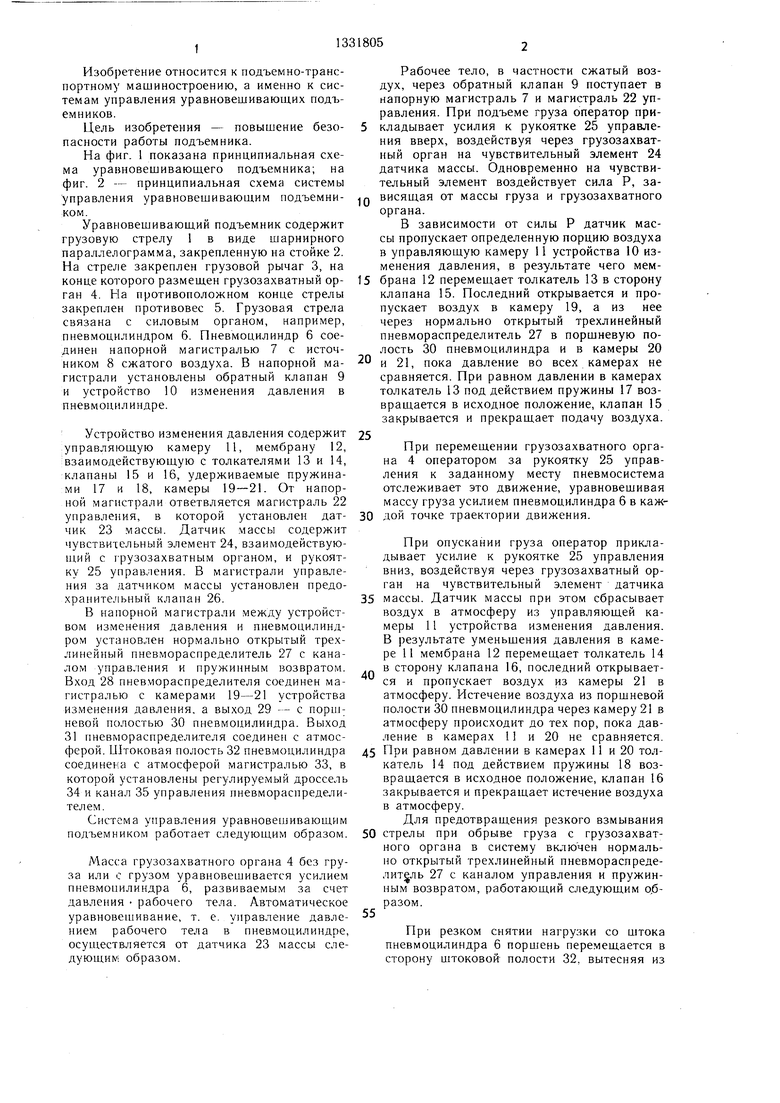
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления уравновешивающим подъемником | 1988 |
|
SU1569317A1 |
| Система управления уравновешивающим подъемником | 1985 |
|
SU1294755A1 |
| Система управления уравновешивающим подъемником | 1983 |
|
SU1221191A2 |
| Уравновешивающий подъемник | 1983 |
|
SU1119969A1 |
| Устройство для управления уравновешивающим стреловым подъемником | 1988 |
|
SU1650561A1 |
| Подъемник-манипулятор с уравновешиванием груза (его варианты) | 1984 |
|
SU1225805A1 |
| Система управления уравновешивающим подъемником | 1977 |
|
SU655638A1 |
| Уравновешивающий подъемник | 1983 |
|
SU1162739A1 |
| Система управления уравновешивающим подъемником | 1984 |
|
SU1199738A2 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1348290A1 |
Изобретение относится к подъемно- транспортному машиностроению, а именно к системам управления уравновешивающих подъемников. Цель изобретения - повышение безопасности работы подъемника. Система содержит источник 8 сжатого воздуха, соединенный с пор1иневой полостью пневмоцилиндра 6, устройство изменения давления в пнев.моцилиндре, датчик массы с чувствительным элементом 24, предохранительный клапан 26, нормально открытый трехлинейный пневмораспределитель 27, установленный между устройством изменения давления в пневмоцилиндре и пневмоци- линдром 6. Пневмораспределитель 27, срабатывая, запирает вход 28 и соединяет выходы 29 и 31 между собой, сообщая при этом поршневую полость 30 пневмоцилиндра с атмосферой. 2 ил. со оо 00 о СП
СГЬ Ci::
2
10
Фиг.1
| Устройство для управления пневматическим приводом стрелы уравновешенного подъемника | 1982 |
|
SU1188079A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
