(54) СИСТЕМА УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ СРЕДСТВОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления грузоподъемным средством | 1985 |
|
SU1353718A2 |
| Устройство управления схватом манипулятора | 1988 |
|
SU1824299A1 |
| Устройство для отделения заготовок от стопы | 1986 |
|
SU1360862A1 |
| Сбалансированный манипулятор с ручным управлением | 1988 |
|
SU1618634A1 |
| СПОСОБ ПРЕССОВАНИЯ И СИСТЕМА УПРАВЛЕНИЯ СИЛОВЫМ ПРИВОДОМ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2005 |
|
RU2346816C2 |
| Механопневматический преобразователь | 1979 |
|
SU996749A1 |
| Тормозная система автопоезда | 1987 |
|
SU1497084A1 |
| Погрузочный манипулятор | 1980 |
|
SU906934A1 |
| Устройство для управления механизмом подачи изделий в зону обработки | 1987 |
|
SU1454768A1 |
| Устройство управления уравновешивающим подъемником | 1985 |
|
SU1296502A1 |
1
Изобретение относится к подъемно-транспортному машиностроению, а именно к пневматическим системам управления грузоподъемными средствами.
Известна система управления грузоподъемным средством, содержащая воздухораспределитель привода захвата и первый клапан, связанный с атмосферой, управляюпхие входы которых соединены с переключателем, пневмокнопку, подключенную к управляюпдему входу второго клапана, усилитель мощности, с которым связаны выходы упомянутых клапанов, и рукоятку управления.
Недостатком известного устройства явяется сравнительно низкая производительность грузоподъемного средства.
Цель изобретения - повышение производительности грузоподъемного средства.
Указанная цель достигается тем, что система снабжена воздухораспределителем силового цилиндра с пружинным возвратом золотника, связанным с усилителем мощности, элементом сравнения, первая камера отрицательного сигнала которого связана с управляющими входами воздухораспределителей привода захвата и силового цилиндра, пневматическим датчиком перемещения штока силового цилиндра, связанным с первой камерой положительного сигнала элемента сравнения, инерционным элементом, подключенным между второй камерой отрицательного сигнала 5 элемента сравнения и датчиком перемещения щтока силового цилиндра, мембранным приводо.м, кинематически сопряженным с рукояткой управления и связанным с выходом и второй камерой положительного сигнала элемента сравнения, причем пневмокнопка соединена со вторым управляющим входом воздухораспределителя силового цилиндра, третий управляющий вход которого соединен с усилителем мощности, а выход второго клапана соединен с выходом воздухораспределителя силового ци15линдра.
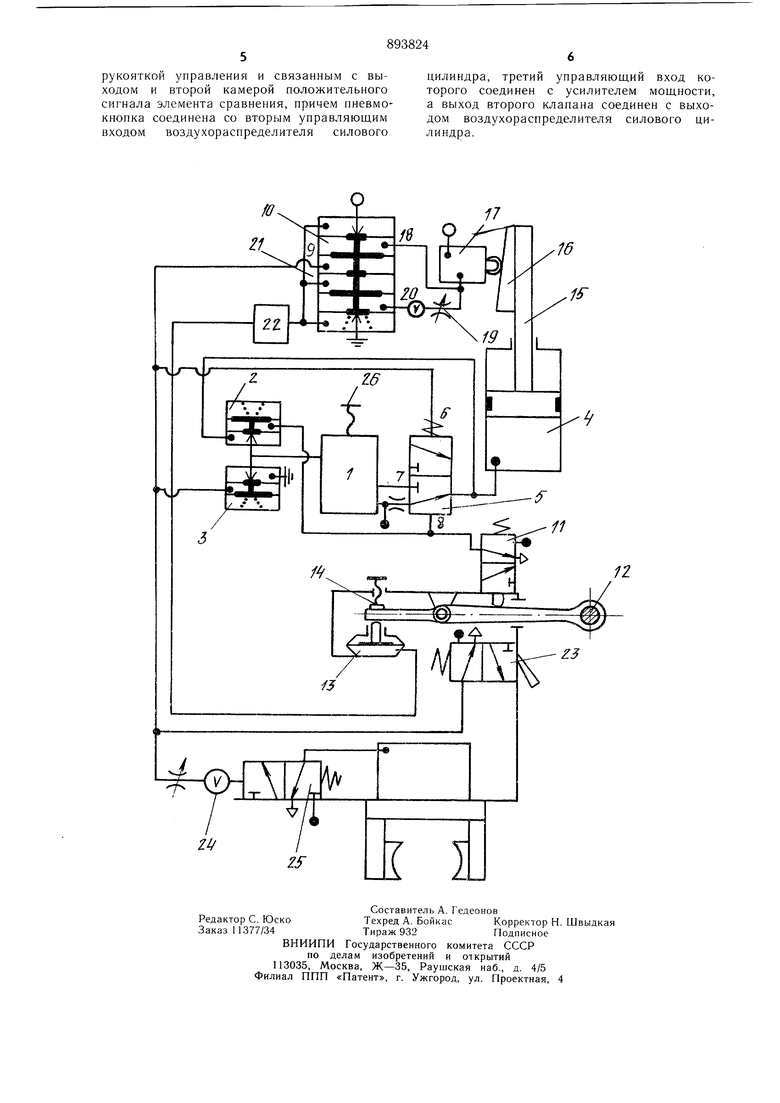
На чертеже изображена схема системы управления.
Система управления содержит усилитель 1 мощности, управляющий вход которого
20 соединен через клапан 2 с рабочей полостью силового цилиндра 4 и через клапан 3 - с атмосферой. Рабочая полость цилиндра 4 соединена с выходом воздухораспределителя 5 силового цилиндра. Управляющие входы 6-8 воздухораспределителя 5 соединены соответственно с первой камерой 9 отрицательного сигнала элемента 10 сравнения, усилителем 1 и пневмокнопкой 11. Управляющий вход клапана 2 соединен с выходом пневмокнопки 11, переключаемый рычагом рукоятки 12 при отклонении последней вверх. Под действием мембранного привода 13 рычаг возвращается в исходное положение, при котором он контактирует с упором 14. На штоке 15 цилиндра 4 укреплен копир 16, взаимодействующий с пневматическим датчиком 17, на выходе которого формируется сигнал в виде уровня давления, пропорционального перемещению штока 15. Выход датчика 17 соединен с первой камерой 18 положительного сигнала и через инерционное звено 19 со второй камерой 20 отрицательного сигнала элемента 10 сравнения. Выход элемента 10 сравнения соединен со второй камерой 21 положительного сигнала и через усилитель 22 с мембранным приводом 13, а камера 9 соединена с выходом переключателя 23, выход которого дополнительно соединен с управляющим входом клапана 3, с управляющим входом 6 воздухораспределителя 5 и через инерционное звено 24 с управляющим входом воздухораспределителя 25 привода захвата. Разжим изделия производится при наличии выходного сигнала с переключателя 23. Усилие зажатия изделия обеспечивается пружиной захватного устройства. Уравновешивание грузоподъемного средства без изделия производится при помощи соответствующей настройки регулировочного винта 26 усилителя 1. Система управления грузоподъемного средства работает следующим образом. В исходном состоянии захватное устройство разжато, т. е. на выходе переключателя 23 выходной сигнал присутствует, поэтому воздухораспределитель 5 и элемент 10 сравнения заблокированы, при этом гарантируется отсутствие выходного сигнала на элементе 10 сравнения, а также - подключение рабочей полости цилиндра 4 к выходу усилителя 1, управляющий вход которого через клапан 3 соединен с атмосферой и поэтому грузоподъемное средство уравновещено без груза соответствующей предварительной настройкой регулировочного винта 26. Оператор за рукоятку 12 подводит захватное устройство к изделию и выключением переключателя 23 производит зажим изделия, при этом убирается блокировка с элемента 10 сравнения и воздухораспределителя 5, а вход усилителя 1 отсекается от атмосферы. При подъеме рукоятки 12 вверх на выходе пневмокнопки 11 появляется сигнал, который переключает клапан 2и воздухораспределитель 5. Рабочая полость цилиндра 4 соединяется с магистралью и через клапан 2 - с усилителем 1. При достижении в рабочей полости цилиндра 4 соответствующего давления щток 15 начинает свое движение, что моментально фиксируется элементом 10 сравнения, на выходе которого появляется устойчивый сигнал благодаря положительной обратной связи. Далее срабатывает мембранный привод 13, устраняя люфт рукоятки 12, при этом на выходе пневмокнопки 11 сигнал исчезает и клапан 2 отсекает вход усилителя 1, а рабочая полость цилиндра 4 соединяется с выходом усилителя 1, который неизменно поддерживает ранее зафиксированное давление, соответствующее уравновешенному состоянию грузоподъемного средства с данным грузом. Оператор переводит за рукоятку 12 захватное устройство с грузом к ложементу выгрузки и включает переключатель 23, при этом сначала соединяется с атмосферой вход усилителя I (подъемник уравновещивается без груза), а уже потом разжимаются захваты. После этого подъемник готов к следующему циклу работы. Система управления грузоподъемным средством расширяет его функциональные возможности, а процесс уравновешивания груза полностью автоматизируется, что, в свою очередь, позволяет увеличить производительность системы оператор-подъем ник примерно на 10 - 15%. Формула изобретения Система управления грузоподъемным средством, содержащая воздухораспределитель привода захвата и первый клапан, связанный с атмосферой, управляющие входы которых соединены с переключателем, пневмокнопку, подключенную к управляющему входу второго клапана, усилитель МОЩНОСТИ, с которым связаны выходы упомянутых клапанов, и рукоятку управления, отличающаяся тем, что, с целью повышения производительности грузоподъемного средства, система снабжена воздухораспределителем силового цилиндра с пружинным возвратом золотника, связанным с усилителем мощности, элементом сравнения, первая камера отрицательного сигнала которого связана с управляющими входами воздухораспределителей привода захвата и силового цилиндра, пневматическим датчиком перемещения щтока силового цилинха,ра, связанным с первой камерой положительного сигнала элемента сравнения, инерционным элементом, подключенным между второй камерой отрицательного сигнала элемента сравнения и датчиком пере.мещения штока силового цилиндра, мембранным приводом, кинематически сопряженным с
