(Б ) ЭЛЕКТРОПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления многофазным синхронным электродвигателем | 1979 |
|
SU917292A1 |
| Устройство для управления многофазным синхронным электродвигателем | 1979 |
|
SU875568A1 |
| ЭЛЕКТРОПРИВОД С СИНХРОННОЙ РЕАКТИВНОЙ МАШИНОЙ | 2012 |
|
RU2510877C1 |
| Реверсивный вентильный электродвигатель | 1977 |
|
SU744861A1 |
| Электропривод переменного тока | 1981 |
|
SU1014117A1 |
| Электропривод | 1987 |
|
SU1439729A1 |
| Устройство для определения углового положения вала двухфазного синхронного двигателя с магнитной асимметрией ротора | 1988 |
|
SU1640808A1 |
| Устройство для управления электроприводом переменного тока | 1980 |
|
SU983958A1 |
| Способ параметрического управления асинхронным короткозамкнутым электродвигателем с вентиляторной нагрузкой и устройство для его осуществления | 1989 |
|
SU1697250A1 |
| Электропривод | 1978 |
|
SU769695A1 |
t
Изобретение относится к электротехнике, а более точно к управлению бесконтактными двигателями постоянного тока.
Известен электропривод, содержащий инвертор, выходы которого через нелинейные индуктивности подключены к синхронному двигателю, датчик положения на валу двигателя, датчик скорости и регулятор фазы, при этом входы регулятора фазы подключены к датчикам скорости и положения, а выход к управляющему входу инвертора l .
Недостаток устройства состоит в том, что регулирование фазы напряжения питания начинается с низкой частоты вращения, что снижает энергетические характеристики привода.
Наиболее близким техническим решением к предлагаемому является электропривод, содержащий коммутатор, выходы которого через нелинейные индуктивности подключены к синх
ронному двигателю, датчик положа ния ротора двигателя, датчик скорости вращения двигателя, пороговый элемент и регулятор фазы, при этом входы регулятора фазы соединены с датчиком положения ротора двигателя и через пороговый элемент с датчиком скорости, выход регулятора фазы соединен с управлтмцим входом коммутатора 2,СЗЗ.
Недостаток электропривода состоит в том, что настройка напряжения срабатывания порогового элемента должна осуществляться на минимальную частоту вращекмя, определяемую минимальным напряжением питания коммутатора, что ограничивает диапазон регулирования скорости и снижает энергетические показатели при напряжениях питаниях, отличных от минимального значения.
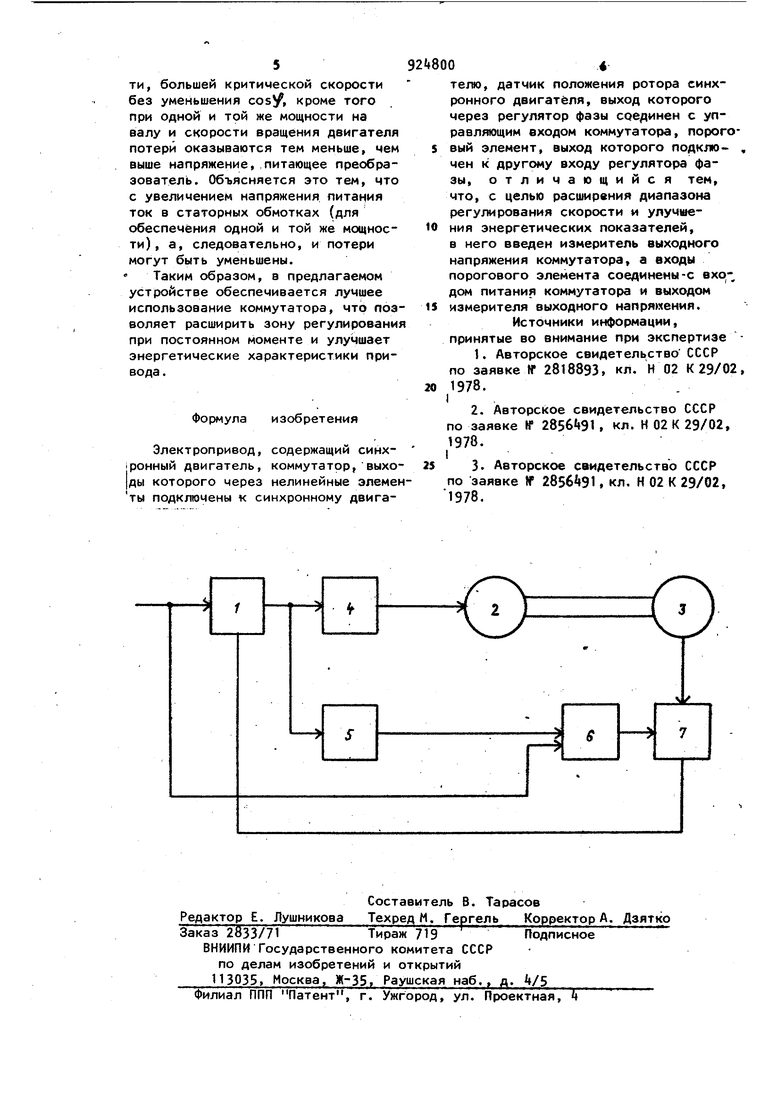
Цель изобретения - расширение диапазона регулирования скорости И улучшение энергетических показателей. Поставленная цель достигается тем, что в электроприводе, содержащем синхронный двигатель, коммутатор, выходы которого через нелинейные индуктивности подключены к синхронному двигатеж, датчик положения на валу двигателя, .выход кото рого через регулятор фазы соединен с управлякхцим входом коммутатора, пороговый элемент, выход которого подключен к другому входу регулятора фазы, введен измеритель выходного напряжения коммутатора, а входы порогового элемента соединен с входом питания коммутатора и выходом измерителя выходного напряжения. На чертеже представлена блоксхема устройства. Устройство содержит коммутатор 1, синхронный двигатель 2 с датчиком 3 положения ротора двигателя, н линейный элемент k, измеритель 5 вы ходного напряжения коммутатора поро гового элемента 6 и регулятора 7 фа зы сигналов датчика положения. Вхо нелинейного элемента А связан с выходом коммутатора Т, а выход - с си хронным двигателем 2. Вход измерителя 5 напряжения связан с выходом коммутатора 1, а выход - с одним вх дом порогового элемента 6, другой вход которого связан с источником напряжения, питающего коммутатор. Вход регулятора 7 фазы сигналов датчика положения ротора двигателя связан с выходом блока 6, а выход - с коммутатором 1, .Устройство работает следующим об разом. . С помощью коммутатора 1 и датчика 3 положения ротора двигателя в статорных обмотках синхронного двигателя 2 формируют переменный ток, величина которого пропорциональна входному сигналу, а частота - скоро ти вращения ротора синхронного двигателя. Пока напряжение на выходе коммутатора 1 меньше критического, отличного от максимального напряжения на величину порога, разгон двигателя происходит под действием мак симального момента, пропорционального входному сигналу, поскольку пороговый элемент 6 не оказывает воздействия на регулятор 7 фазы сиг налов датчика положения ротора дви4гателя. Как только разность эталон- ного напряжения, пропорционального величине напряжения, питающего коммутатор, и выходного напряжения коммутатора, достигнет порогового значения, пороговый формирователь элемента 6 на инает передавать сигналы на регулятор 7 фазы, включая его в работу. При этом регулируют фазу выходного сигнала датчика положения ротора двигателя и, тем самым, фазу тока статора относительно ЭДС синхронного двигателя так, чтобы синхронный двигатель потреблял емкостной ток. Поскольку сопротивление нелинейного элемента носит индуктивный характер, то в цепи, состоящей из последовательно соединенных входного сопротивления электрической машины и выходного сопротивления коммутатора, создаются условия для возникновения резонанса напряжений. Известно, что при резонансе в последовательной цепи напряжение на реактивных элементах может значитель но превышать напряжение на входных клеммах. Поэтому напряжение (ЭДС) на двигателе, а следовательно, и скорости вращения двигателя, может быть существенно повышена. Для обеспечения резонанса в широком диапазоне изменения скорости достаточно обеспечить пропорциональное опережение фазы сигналов датчика положения, т.е. фазы токов статора , поскольку индуктивное сопротивление нелинейного элемента настраивается автоматически в резонанс с подключенной к ней емкостью. В предлагаемом устройстве в качестве эталонного используется напряжение, питающее коммутатор; источником информации является выходное напряжение (основная гармоника) Преобразователя. Такое построение электропривода создает возможности для лучшего использования энергетических возможностей электропривода при изменении питающего напряжения, в особенности при питании привода от аккумуляторных батарей. Как правило, выходное напряжение батарей в исходном состоянии значительно превышает минимальную величину, поэтому использование в качестве эталонного выходного напряжения- аккумулятора позволяет электроприводу осуществить разгон двигателя с максимальным моментом на его валу до скороети, большей критической скорости без уменьшения cosjj, кроме того при одной и той же мощности на валу и скорости вращения двигателя потери оказываются тем меньше, чем выше напряжение,.питающее преобразователь. Объясняется это тем, что с увеличением напряжения питания ток в статорных обмотках (для обеспечения одной и той же мощности) , а, следовательно, и потери могут быть уменьшены. Таким образом, в предлагаемом устройстве обеспечивается лучшее использование коммутатора, что позволяет расширить зону регулировани при постоянном моменте и улучшает энергетические характеристики привода.
Формула изобретения
Электропривод, содержащий синхронный двигатель, коммутатор, выходы которого через нелинейные элементы подключены к синхронному двига2kBOQ4
телю, датчик положения ротора синхронного двигателя, выход которого через регулятор фазы соединен с управляющим входом коммутатора, пороге5 вый элемент, выход которого подклю- , чен к другому входу регулятора фазы, отличающийся тем, что, с целью расширения диапазона регулирования скорости и улучшеto ния энергетических показателей, в него введен измеритель выходного напряжения коммутатора, а входы порогового элемента соединены-с вхо|- дом питания коммутатора и выходом
15 измерителя выходного напря хения.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР по заявке ff 2818893, кл. Н 02 К 29/02,
20 1978..
по заявке If , кл. Н 02 К 29/02, 1978.
О
