(Л
подключена к тирнсторному возбудителю 3, входом подключенному к третьему выходу формирователя 10 управляющих напряжений. Другие два выхода формирователя 10 соединены с блоком П преобразования координат, подключенным ; к системе управления 12 НПЧ 2. На вход системы управления 12 поступают также сигналы с формирователя 15 ЭДС статора, значения к-рых формируются по сигналам, поступающим с датчиков 4 и 5 и датчика 7 частоты вращения, В электропривод введены блок 16 задания потока и реактивной мощности, блок 17 вычисления действительных значений момента, потока и
реактивной мощности по сигналам, поступающим с формирователя 13 пото- косцепления статора и с преоб дзова- теля 14 числа фаз. Между блоком 9 интеграторов и формирователем 10 включен формирователь 18 управляющих токов. На выходе блока 9 сигналы формируются на основе сигналов, поступающих с блока 16 задания потока, с регулятора 8 частоты вращения и с выхода блока 17. В электроприводе обеспечивается точное регулирование момента, модуля основного магнитного потока и реактивной мопщости, т.е. параметров, характеризующих энергетический режим работы СД.1. 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1984 |
|
SU1272459A1 |
| Электропривод переменного тока | 1985 |
|
SU1359881A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| УСТРОЙСТВО ПРЯМОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ДВИГАТЕЛЯ НА ОСНОВЕ ТРЕХФАЗНОГО ТРЕХУРОВНЕВОГО АВТОНОМНОГО ИНВЕРТОРА NPC | 2023 |
|
RU2821420C1 |
| Электропривод | 1983 |
|
SU1167688A1 |
| Устройство для частного управленияэлЕКТРОпРиВОдОМ пЕРЕМЕННОгО TOKA | 1978 |
|
SU794701A1 |
| Вентильный электропривод | 1984 |
|
SU1205246A1 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
| Электропривод переменного тока | 1984 |
|
SU1185528A1 |
Изобретение относится к электротехнике и может быть использовано в прокатных станах, безредукторных цементных мельницах, на судах-. Целью изобретения является улучшение энергетических показателей путем тонного поддержания заданного энергетического режима синхронного двигателя. Электропривод содержит синхронный двигатель (СД) 1, статррная обмотка к-рого подключена через датчик тока 4 и датчик напряжения 5 к непосредственному преобразователю частоты (НПЧ) 2. Обмотка возбуждения СД 1
1
Изобретение относится к электротехнике и может быть использовано дпя мощных приводов с повышенными требованиями к энергетическим показателям работы, например, главных приводов прокатных станов, безредукторных цементных мельниц, гребных приводов крупных морских судов.
Целью изобретения является улучще- ние энергетических показателей электропривода путем точного поддержания заданного энергетического режима синхронного двигателя.
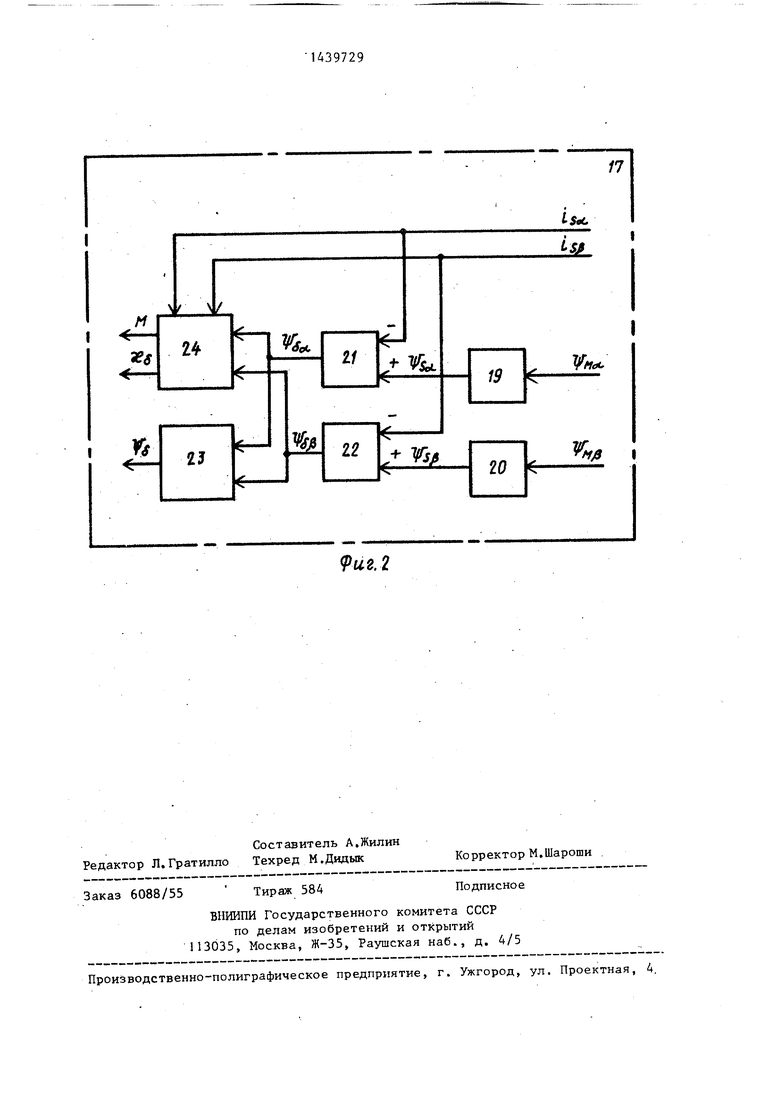
На фиг. 1 представлена функционал ная схема электропривода; на фиг.2 - схема блока вычисления параметров режима.
Электропривод содержит синхронный двигатель 1 (фиг. 1), статорные об- мотки которого подключены к выходам непосредственного преобразователя 2 частоты, тиристорный возбудитель 3, выход которого соединен с обмоткой возбуждения синхронного двигателя 1, датчики 4 фазных токов, датчики фазных напряжений, включенных в цепь фаз статорной обмотки синхронного двигателя, датчик 6 углового положения, установленный на валу синхрюнно го двигатеЛя 1 и подключенный выходами к измерителю 7 частоты вращения, регулятор 8 частоты вращения с вхо- . дом для задания и входом обратной
связи, подключенным к выходу измерителя 7 частоты вращения, блок 9 интеграторов с тремя входами задания и тремя входами обратной связи, формирователь 10 управляющих напряжений с тремя входами и тремя выходами, блок 1 1 преобразования координат с двумя управляющими и дв.умя опорными входами, блок 12 управления преобразователем частоты с тремя группами входов, формирователь 13 потокосцепления статора с двумя, группами входов, преобразователь 14 числа фаз и формирователь 15 ЭДС статора, первые два входа которого подключены к выходам формирователя 13 потокосцепления статора, а третий вход - к выходу измерителя 7 частоты вращения.
При этом первая группа входов формирователя 13 потокосцепления статора подключена к выходам датчика 5 фазных напряжений, а вторая группа входов объединена пофазно с гходами преобразователя 14 числа фаз и подключена к выходам датчика 4 фазных токов.
Первые два выхода формирователя 10 управляющих напряжений подключены к соответствующим управляющим входам блока 11 преобразования координат, опорные входы которого соединены с выходами датчика 6 углового положения. Третий выход формирователя 1 О управля 14
ющих напряжений подключен к управляющему входу тиристорного возбудителя
Выходы блока 11 преобразования координат, датчика А фазных токов и формирователя 15 ЭДС статора подклю- ;ченык соответствующим группам входов блока 12 управления преобразователем частоты,
В электропривод введены блок 16 заданий потока и реактивной мощности, блок 17 вычисления действительных значений момента, потока и реактивной мощности с четырьмя входами и тремя выходами и формирователь 18 управляющих токов, три входа которого подключены к соответствующим выходам блока 9 интеграторов, а три выхода - к соответствующим входам формирователя 10 управляющих напряжений .
При этом один вход блока 16 задания потока и реактивной мощности под
машин. Параметры режима определяются по соотношениям
,ГAi -%iвл;
s ,,is ;
(1)
где ig.. ,ig-- проекции тока статора, в
осях lit статора;
ffi,S, проекции основного потока в осях (С, статора. Составляющие основного потока находят из уравнений
(2)
ключен к выходу регулятора 8 частоты относительных единицах (системы Хдл). вращения, а другой вход блока 16 сое- 25 Использованы обозначения, общепринятые динен с входом дпя задания частоты в аналитической теории синхрЪ нных вращения этого регулятора.
Выходы блока 16 задания потока и реактивной мощности и выход регулятора 8 частоты вращения подключены к 30 соответствующим входам задания блока 9 интеграторов, входы обратной связи которого подключены к соответствующим выходам блока 17 вычисления, соединенного одной парой входов с выходами формирователя 13 потокосцепления статора, а другой парой входов - с выходами преобразователя 14 числа фаз.
Блок 17 вычисления действительных значений момента, потока и реактивной 40 мощности может быть выполнен с двумя корректирующими элементами 19 и 20, с двумя суммирующими элементами 21 и 22, с выч21слителем 23 потока и с вычислителем 24 момента и реактивной мощности, первые два входа которого попарно объединены с входами вычислителя 23 потока и через суммирующие элементы 21 и 22 подключены к выходам корректирующих элементов 19 и 20 50
ТИПЭ J/
соответственно.
При этом другие два входа вычислителя 24 попарно объединены с другими входами суммирующих элементов 21 и 22 и образуют одну пару входов блока 17, 55 другую пару входов которого образуют входы корректирующих элементов, а выходы блока 17 образованы выходами вычислителей 23 и 24„
45
SoL, Sii-Xs6-isc6, 4 Vsp-Xs.is,
гдеН д4,Ч , - проекции потокосцепления статора в осях статора
«, ;
х, - индуктивность рассеяния
OD
статора.
Токи ig, ig. выражаются через то- кн фаз статора синхронного двигателя icA « isg ific помощью преобразования
SA
Ч
1
i
(3)
Чс
Потокосцепления fsii st получаются из вьтходных сигналов 4, Y,, формироСистема регулирования электропривода разработана на основе теории систем подчиненного регулирования с последовательной коррекцией для многосвязных объектов. В соответствии с этой методикой образованы два замкнутых контура: внешний одномерный контур регулирования частоты вращения и
внутренний многомерный контур регулирования параметров режима синхронного двигателя. Б качестве параметров, характеризующих режимы работы синхронного двигателя, выбраны следующие
переменные: М - электромагнитный момент синхронного двигателя; s - wo- дуль основного потока; д&$- величина, характеризующая при определенной скорости реактивную мощность, подводимую
к воздзтпному зазору синхронного двигателя. Все переменные и параметры синхронного двигателя, кроме времени и постоянных времени, представлены в
машин. Параметры режима определяются по соотношениям
относительных единицах (системы Хдл). Использованы обозначения, общепринятые в аналитической теории синхрЪ нных
,ГAi -%iвл;
s ,,is ;
(1)
где ig.. ,ig-- проекции тока статора, в
осях lit статора;
ffi,S, проекции основного потока в осях (С, статора. Составляющие основного потока находят из уравнений
(2)
SoL, Sii-Xs6-isc6, 4 Vsp-Xs.is,
гдеН д4,Ч , - проекции потокосцепления статора в осях статора
«, ;
х, - индуктивность рассеяния
OD
статора.
Токи ig, ig. выражаются через то- кн фаз статора синхронного двигателя icA « isg ific помощью преобразования
SA
Ч
1
i
Чс
Потокосцепления fsii st получаются из вьтходных сигналов 4, Y,, формировате.ля 6 потокосцеплеиий, входящего в сос тав измерителя ЭДС, При этом сигналы , Mf корректируются при помощи звеньев, входящих в состав блока 17 вычисления параметров режимов (фиг. 1) и имеющих передаточные функции вида
W,,(p)
КТ,р(р+1) + 1
кт,.р+1)
(4)
где К и Т„ - параметры формирователя потокосцеплений.
Электропривод работает следующим образом.
Сигнал задания частоты вращения Wn поступает на вход регулятора 8
15
Блок 9 состоит из трех интегрирующих звеньев с передаточными функциями
W.,(p)
1
2Тр
(6)
частоты вращения, где сравнивается сигналом действительного значения скорости а), поступающим от измерителя 7 частоты вращения. Для измерения частоты вращения используется соотно- - шение
с 20 где Т - постоянная времени, выбирае- i мая в соответствии с требованиями к электроприводу.
Выходные сигналы блока 9 Му.Н ,
вводятся в формирователь 18 уп- 25 равляющих токов, на выходах которо(д) cos1f
d-sinY
dt
-sin у.
d -cosV
dt
(5)
ifd% «rfy
ГО получают i, Сигналы М.
у. r«tSy сначала преобразуются в токи и потокосцепления синхронного двигателя в системе жения ротора, выраба- зо координат х, у, связанной с вектором тьгоаемые датчиком 6основного потока, по следующи { уравнениям
где COSIS ,sinif - функции углового полоуглового положения. Заданные значения момента М с выхода регулятора 8 и задание на частоту вращения tOo подаются на вход блока «с 16 заданий, который вырабатьшает заданные значения параметров и При наиболее простом варианте реализации блока 8 задания. H j. и se-g, являются постоянными величинами,
1,-.. Г Г-
щей системы к токам
,
s
динат d, q, связ анной
M:,
5й -
Гч,.
Затем при помощи локальной следя- осуществляется переход
isq.o.j 1тДп.в системе коор- i
fi п г
Фактические значения параметров режимов вычисляются в .блоке 17 вычисления . При этом используются выходные
сигналы преобразователя 14 числа фаз,
,„ч.электромагнитных свойств синхронного
реализующего соотнощения (-5; , и фор- дцт,
/ i ТТО ТЛ.П а rf а Rt-ГЛГГ ГПЯ-ШЛТТ гг ж.т rfv .Г
мирователя 13 потокосцеплений статора. На вход преобразователя 14 подаются сигналы с датчика 4 токов статора, В качестве входных сигналов фор50
в системе
с ротором синхронного двигателя.
В формирователе 10 управляющих напряжений выполняется компенсация
мирователя 13 используются сигналы датчиков 4 и 5 токов и напряжений. Сигналы .. преобразуются в
налы TS, Vg. при помощи корректирующих элементов 19 и 20 (фиг. 2) с педвигателя. Выходными сигналами формирователя 10 являются задания напряжений статора Ugj, Ug и напряжения возбуждения Ufj. Сигналы Ugj, Ug. преобразуются блоком 11 преобразования координат в сигналы U, Uga, посту- пающие на входы блока 12. Сигнал и.я подается на управляющий вход ти- ристорного возбудителя 3,
редаточной функцией (4). Соотношения gg Блок 12 содержит преобразователь
(2) реа;1изуются на суммирующих элементах 21 и 22. Параметры режимов определяются по уравнениям () с помощью блоков 23 и 24, состоящих из типовых
числа фаз для сигналов Ih
Uc
SeC,s -Ч.Д Р
регулятора фазных токов, используемые для подавления нелинейных свойств преобразователя частоты, три суммиов4397296
элементов, используемых ддя систем регулирования приводов переменного тока. Выходными сигналами блок 24 являются момент М и величина 56j, а блока 24 - модуль вектора основного потока
Заданные -значения параметров ре
,ае с выходов блока 16
жимов MO,
заданий регулятор 8 частоты вращения поступают на входы блока интэграто- ров 9, где сравниваются с действительными значениями параметров.
Блок 9 состоит из трех интегрирующих звеньев с передаточными функциями
W.,(p)
1
2Тр
(6)
Выходные сигналы блока 9 Му.Н ,
вводятся в формирователь 18 уп- равляющих токов, на выходах котороSot # ifd% «rfy
ГО получают i, Сигналы М.
у. r«tSy сначала преобразуются в токи и потокосцепления синхронного двигателя в системе координат х, у, связанной с вектором основного потока, по следующи { урав Г-
,
s
M:,
щей системы к токам
динат d, q, связ анной
Затем при помощи локальной следя- осуществляется переход
isq.o.j 1тДп.в системе коор- i
fi п г
в системе
с ротором синхронного двигателя.
В формирователе 10 управляющих напряжений выполняется компенсация
т,
ТТО ТЛ.П а rf а Rt-ГЛГГ ГПЯ-ШЛТТ гг ж.т rfv .Г
двигателя. Выходными сигналами формирователя 10 являются задания напряжений статора Ugj, Ug и напряжения возбуждения Ufj. Сигналы Ugj, Ug. преобразуются блоком 11 преобразования координат в сигналы U, Uga, посту- пающие на входы блока 12. Сигнал и.я подается на управляющий вход ти- ристорного возбудителя 3,
числа фаз для сигналов Ih
Uc
SeC,s -Ч.Д Р
регулятора фазных токов, используемые для подавления нелинейных свойств преобразователя частоты, три суммирующих элемента, на входы которых подаются выходные сигналы фазных регуляторов и выходные сигналы измерителя ЭДС. Выходные сигналы суммирующих элементов, являющиеся выходными сигналами блока 12, поступают на управляющие входы преобразователя 2 частоты.
Таким образом, введение в электропривод блока заданий потока и реактивной мощности и блока вычисления действительных значений момента, потока и реактивной мощности обеспечивают возможность непосредственного и точного регулирования момента, модуля основного магнитного потока и реактивной мощности, т.е. параметров, характеризующих энергетический режим
ния статора, а третий вход - к выходу измерителя частоты вращения, при этом первая группа входов формирователя потокосцепления статора подключена к выходам датчика фазньк напряжений, а вторая группа входов объеди нена пофазно с входами преобразовате ля числа фаз и подключена к выходам
10 датчика фазных токов, первые два выхода формирователя управляющих напря жений подключены к соответствующим управляющим входам блока преобразова ния координат, опорные входы которо15 го соединены с выходами датчика угло вого положения, третий выход формирователя управляющих напряжений подключен к управляющему входу тиристор ного возбудителя, выходы блока преоб
работы двигателя, благодаря чему улуч-20 разования координат, датчика фазных
токов и формирователя ЭДС статора подключены к соответствующим группам входов блока управления непосредст- венным преобразователем частоты, отличающийся тем, что, с целью улучшения энергетических показателей путем более точного поддержа ния заданного энергетического режима синхронного двигателя, введены блок заданий потока и реактивной мощности блок вычислений действительных значе ний j момента.потока и реактивной мощ ности с двумя парами входов и тремя выходами и формирователь управляющих токов, три входа которого подключены к соотве тствующим выходам блока интеграторов, а три выхода - к соответствующим входам формирователя управляющих напряжений, при этом один вход блока задания потока и реактивной мощности подключен к выходу регу лятора частоты вращения,, а другой вход объединен с входом для задания названного регулятора, выходы. блока 45 задания потока и реактивной мощности и выход регулятора частоты вращения подключены к соответствующим входам задания блока интеграторов, входы обратной связи которого подклю чены к соответствующим выходам блока вычисления действительных значений момента, потока и реактивной мощности, соединенного одной парой входов с выходами формирователя потокосцепления статора, а другой парой входов- с выходами преобразователя числа фаз
шаются энергетические показатели электропривода (повышается КПД) в сравнении с известным решением.
Формула изобретения
Электропривод, содержащий синхронный двигатель, статорные обмотки которого подключены к выходам непосредственного преобразователя частоты, тиристорный возбудитель, выход которого соединен с обмоткой возбуждения синхронного двигателя, датчики фазных токов и напряжений статорной обмотки синхронного двигателя, датчик углового положения, установленный на валу синхронного двигателя и подключенный выходами к измерителю частоты вращения, регулятор частоты вращения с входом задания и входом обратной связи, подключенным i выходу измерителя частоты вращения, блок интеграторов с тремя входами задания и тремя входами обратной связи5Фор- мирователь управляющих напряжений с тремя входами и тремя выходами, блок преобразования координат с двумя управляющими и двумя опорными входами, блок управления непосредственным преобразователем частоты с тремя группами входов, формирователь потокосцепления статора с двумя группами входов, преобразователь числа фаз, и формирователь ЭДС статора, первые два входа которого подключены у. выходам формирователя потокосцепле
9729
ния статора, а третий вход - к выходу измерителя частоты вращения, при этом первая группа входов формирователя потокосцепления статора подклю чена к выходам датчика фазньк напряжений, а вторая группа входов объединена пофазно с входами преобразователя числа фаз и подключена к выходам
10 датчика фазных токов, первые два выхода формирователя управляющих напряжений подключены к соответствующим управляющим входам блока преобразования координат, опорные входы которо15 го соединены с выходами датчика углового положения, третий выход формирователя управляющих напряжений подключен к управляющему входу тиристор- ного возбудителя, выходы блока преобразования координат, датчика фазных
токов и формирователя ЭДС статора подключены к соответствующим группам входов блока управления непосредст- . венным преобразователем частоты, отличающийся тем, что, с целью улучшения энергетических показателей путем более точного поддержания заданного энергетического режима синхронного двигателя, введены блок . заданий потока и реактивной мощности, блок вычислений действительных значений j момента.потока и реактивной мощности с двумя парами входов и тремя выходами и формирователь управляющих токов, три входа которого подключены к соотве тствующим выходам блока интеграторов, а три выхода - к соответствующим входам формирователя управляющих напряжений, при этом один вход блока задания потока и реактивной мощности подключен к выходу регулятора частоты вращения,, а другой вход объединен с входом для задания названного регулятора, выходы. блока задания потока и реактивной мощности и выход регулятора частоты вращения подключены к соответствующим входам задания блока интеграторов, входы обратной связи которого подключены к соответствующим выходам блока вычисления действительных значений момента, потока и реактивной мощности, соединенного одной парой входов с выходами формирователя потокосцепления статора, а другой парой входов- с выходами преобразователя числа фаз.
9u2.2
Составитель А.Жилин Редактор Л.Гратилло Техред М.Дндык
Заказ 6088/55
Тираж 584
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Корректор М.Шароши
Подписное
| Устройство для управления электроприводом переменного тока | 1980 |
|
SU983958A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вёйнгер A.M | |||
| Регулируемый синхронный электропривод | |||
| М.: Энергоатомиз- дат, 1985, с | |||
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
