(5 СТЕНД ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ИЗДЕЛИЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для динамических испытаний изделий | 1980 |
|
SU998890A2 |
| Стенд для динамических испытаний изделий | 1981 |
|
SU1013796A1 |
| Стенд для испытания изделий на удар | 1982 |
|
SU1073610A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ИЗДЕЛИЙ НА УДАРНОЕ ВОЗДЕЙСТВИЕ. РАЗГОННОЕ УСТРОЙСТВО СТЕНДА. ТОРМОЗНОЕ УСТРОЙСТВО СТЕНДА | 2002 |
|
RU2235302C2 |
| СТЕНД ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ИЗДЕЛИЙ | 2003 |
|
RU2249808C2 |
| Стенд для ударных испытаний изделий | 1980 |
|
SU938057A1 |
| СТЕНД ДЛЯ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ (ВАРИАНТЫ) | 2020 |
|
RU2749646C1 |
| Стенд для ударных испытаний | 1989 |
|
SU1803753A1 |
| Способ испытаний объектов на ударную нагрузку | 1990 |
|
SU1777019A1 |
| Тормозное устройство к ударному испытательному стенду | 1981 |
|
SU954833A1 |
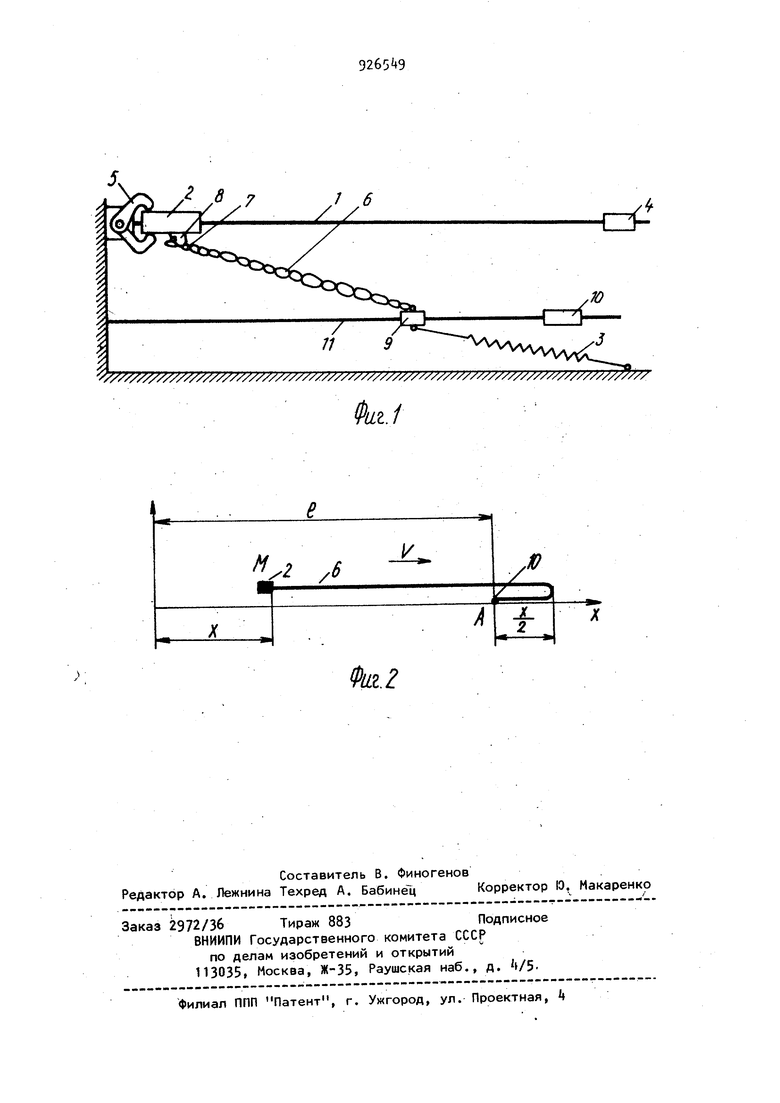
Изобретение относится к испытатель ной технике, в частности к стендам для динамических испытаний изделий путем их разгона и резкого торможения Известен стенд для динамических испытаний, содержащий платформу для размещения испытуемого издели1Ч, разгонное устройство в вид упругих элементов и формирователь тормозного импульса П Наиболее близким к предлагаемому по технической сущности является стенд для динамических испытаний изделий, содержащий направляющую, плат форму для установки испытуемого изделия, размещенную на направляющей, разгонное устройство, формирователь тормозного импульса, фиксатор исходного положения платформы и гибкую тягу, соединяющую разгонное устройство с платформой. Гибкая тяга перебрюшена через блок и служит для изменения направления усилия, создаваемого разгонным устройством, которое выполнено в виде пневмоцилиндра {21. Недостаток известных стендов заключается в невозможности разгона платформы до 1болыаих (околозвуковых) скоростей. Цель изобретения - повышение достижимой испытательной нагрузки путем о увеличения конечной скорости разгона платформы. Поставленная цель достигается тем, что стенд снабжен приспособлением для захвата гибкой тяги, установленным на пути ее перемещения, причем масса гибкой тяги и начальное расстог яние от нее до приспособления для захвата выбраны из условия накопления а гибкой тяге кинетической энергии, необходимой для разгона платформы с изделием. до заданной по условиям испытаний скорости. С целью формирования разгонных импульсов различной формы гибкая тяга 392 может быть выполнена в виде цепи с переменной по ее длине массой, На фиг. 1 представлена принципиал ная схема предлагаемого етёнда; на фиг. 2 - схема, поясняющая способ ус корения платформы с испытуемым изделием с помощью гибкой тяги. Стенд содержит направляющую 1, на которой размещена платформа 2 для ус тановки испытуемого изделия, разгонное устройство в виде натянут 1го упру гого шнура 3, формирователь 4 ударного импульса, размещенный в конце направляющей 1, фиксатор 5 исходного положения платформы 2, гибкую тяГу 6 ввиде цепи с переменной по ее длине массой, один конец которой с помощью скобы 7 зацепляется с крюком 8, установленным на платформе 2, а другой связан с втулкой 9, соединенной с упругим шнуром 3. Приспособление для захвата гибкой тяги представляет собой упор-10, закрепленный на дополнительной направляющей 11, по которой движется при разгоне втулка 9 гибкой тяги 6. Стенд работает .следующим образом. . Платформа 2 отводится в крайнее левое положение и захватывается фиксатором 5. При этом упругий LiHyp 3 растягивается и накапливает потенциальную энергию. После отключения фиксатора 5 платформа 2 освобождается, и упругий шнур 3 разгоняет подвижные части стенда (платформу 2 с испытуемым изделием и гибкуютягу 6)-до скорости Vo. При этом подвижным частям стенда сообщается необходимый запас кинетической энергии То. .После достижения cкop.octи Vo втулка 9 встре чается с упором 10 в тоМке А, и гибкая тяга начинает двигаться, образуя петлю (фиг, 2). Закон движения гибкой тяги 6 с присоединенной к ней платформой 2 определяется из условия сохранения кинетической энергии в подвижных частях стенда (при пренебрежении силами трения). Перешедшие через изгиб петли участ ки гибкой тяги 6 останавливаются и передают свою кинетическую энергию двигающимся частям гибкой тяги 6 и платформе 2, в результате чего послед ние ускоряются. Таким образом, кинетическая энергия, запасенная участками гибкой тяги 6, постепенно передается платформе 2, и при полном распрямлении петли платформа приобретает максимальную скорость Vmax которая определяется начальной скоростью Vo и соотношением масс гибкой тяги и платформы 2. В этот момент скоба 7 соскальзывает с крюка 8, и платформа 2 свободно движется по направляющей.1 до встречи с формирователем ( тормозHord импульса, который задает необходимый закон торможения. Конечная скорость разгона платформы Vrnax может быть изменена путем изменения массы гибкой тяги и начальной скорости Vo. Последнюю можно менять, задавая различное начальное расстояние упругого шнура 3. Применяя гибкую тягу в виде цепи с переменной по ее длине массой, можно получить различные законы изменения скорости разгона. Определяя закон движения платформы 2 с испытуемым изделием, рассматривают гибкую тягу 6 как нить, при этом пренебрегая весом нити и потерями на трение, сопротивлением среды и считая нить невесомой и нерастяжимой, можно полагать, что кинетическая энергия Т системы не превращается в дру-. гие виды энергии, остается постоянной в любой момент времени и равной начальной То. Для случая с нитью постоянного сечения по длине TO 1/2(}f(o-e + fO Vo , (1) где Vo - скорость нити в момент захвата; If - плотность нити; 5с1 площадь сечения нити (const); - длина нити; М - масса платформы с изделием, В свою очередь (фиг.2) Т 1/2 1Г-ёо(Е -) + M -VX«-, (2) где X - текущее значение пройденного V - скорость движущегося участка нити с платформой в любой момент времени. Приравнивая (1) и (2), получают Vx -Vot1 1/2 (3) 2(1 f) Анализируя выражение (3), можно заметить, что при X 21 и М/1Гйо 0 с орость V Однако, так как отношение %. &се же не равно нулю, конеч5 .92 ная скорость разгона платформы является ограниченной величиной, но может достигать довольно-таки больших значений по сравнению с величиной Vo Так; подставив в ({юрмулу f3) еледующие значения :V 8 кг/см ,io 0,5 см , 1 15 миМ 3 кг, полу чают V ,3Vo На практике из-за потерь на преодоление сопротивления среды и трени скорость несколько меньше. Физический смысл данного явления заключается в том, что масса движуще ся системы все время уменьшается, а так как Т const, то скорость ее увеличивается. Если we рассматривать случай с нитью переменного сечения по длине d(х) f(x), то, так как масса движущегося участка нити изменяется по заданному закону т(х) Sjf d (x)dx, скорость движущегося участка нити (объекта) V .будет функцией от X у Г Гх) .. Аналогичными рассуждениями, что и для нити с постоянным сечением, приравнивая TQ и Т, можно, задаваяс требуемым законом V Ч fx) определить необходимый закон ё (х) (х) и наоборот. Формула (3) в данном случае имеет вид у у Г. Jr(x)dx (x)dx + М В случае вертикального движения нити значения скоростей, определяемых по формулам (3) и (4), несколько выше так как добавляется ускорение свободного падения. Использование изобретения позволяет путем применения простых техничес(4) ких средств достичь околозвуковых скоростей разгона испытуемого объекта при заданном законе изменения ускорения разгона. При эксперименталь ной проверке изобретения изделие весом 50 г удалось разогнать до сверхзвуковой скорости при начальной скорости разгона в несколько десятков м/с. Формула изобретения 1.Стенд для динамических испытаний изделий, содержащий направляющую платформу для установки испытуемого изделия, размещенную на направляющей, разгонное устройство формирователь тормозного импульса, фиксатор исходного положения платформы и гибкую тягу, соединяющую разгонное устройство с платформой, отличающийся тем, что, с целью повышения достижимой испытательной нагрузки, он снабжен приспособлением для захвата гибкой тяги, установленным на пути ее перемещения, причем масса гибкой тяги и начальное расстояние от нее до приспособления для захвата выбраны из условия накопления в гибкой тяге кинетической энергии, необходимой для разгона платформы с изделием до заданной по условиям испытаний скорости. 2.Стенд по п. 1, о т л и ч а ющ и и с я тем, что, с целью формирования разгонных импульсов различной формы, гибкая тяга выполнена и виде цепи с переменной по ее длине массой. I, Источники информации, принятые во внимание при экспертизе 1,Авторское свидетельство СССР N 509809, кл. G 01 М 7/00, 197А. 2.Патент США № 3001393, кл. 73-12, 1961.
Фи.г.1
Физ..2
