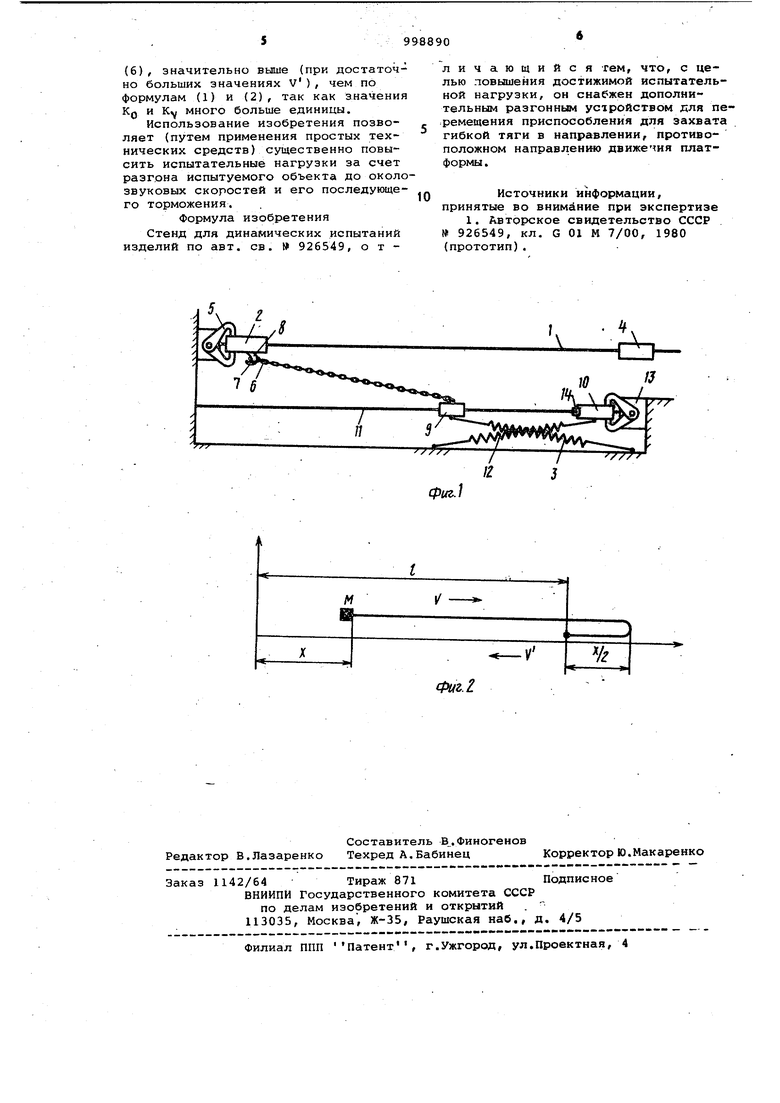
гибкой тп1и включает упорную втулку И), разм«мценную с.возможностью перемещении на направляющей 11, по которой лвижетс;п при разгоне втулка 9, дополнительное разгонное устройство для перемещения приспособления для ;захвата гибкой тяги б в виде натянутого упругого шнура 12, фиксатор 13 исходного положения упорной втулки 10 и расположенный на упорной втулке 10 концевой выключатель 14, при нажатии на который фиксатор 13 освобождает упорную втулку 10. Стенд работает следующим образом. Платформа 2 отводится в крайнее левое положение и захватывается фиксатором 5. Упорная втулка 10 отводится в крайнее правое положение и захватывается фиксатором i3. После отключения фиксатора 5 платформа 2 освобождается и упругий шнур 3 разго няет подвижные части стенда (платфор му 2 с испытуемым изделием и ги-бкую тягу 6) до скорости VP. Прк этом под вижным частям стенда сообщается необходимый запас кинетической энергии TO. После достижения скорости Vp втулка 9 встречается с упорной втулкой,10 в точке Л, и гибкая тяга начинает двигаться, образуя петлю (фиг. 2). При контакте втулки 9 с упорной втулкой 10 срабатывает концевой выключатель 14, по команде которого фиксатор 13 освобождает упорную втулку 10. Последняя под действием упругого шнура 12 начинает двигаться со скоростуо v в направлении противоположном направлению движения платформы, и увлекать за собой втулку 9 вместе с концом гибкой тяги. При этом закон движения гибкой тяги 6 с присоединенной к ней платформой 2 определяется из условия сохранения кинетической энергии Тр, запасенной в подвижных частях стенда (при пренебрежении силами трения). Кинетичес кая энергия, запасенная участками гибкой тяги б, постепенно передается платформе 2. и при полном распрям лении петли платформа приобретает максимальную скорость. При этом скоба 7 выходит из зацепления (соскаль зывае) с крюка 8, а платформа 2 с испытуемым изделием продолжает движение. Затем платформа 2 тормозится с помощью формирователя 4 тормозног импульса. При этом формируется заданный тормозной импульс. Применяя .гибкую тягу в виде цепи с переменной по ее длине массой, мо но получить различные законы измене ния скорости разгона. Определим закон движения платфор мы 2 с испытуемым изделием. оп для го Для известного стенда этот закон еделялся формулами; и/а --Л/оКо 0 случая с гибкой тягой постоянносечения, для случая с гибкой тягой переменного сечения, где V - скорость платформы в произвольный момент времени; М - масса платформы с изделием;X - путь, пройденный платформой ; Т - полость гибкой ТЯГИ; I - длина тяги; ( - площадь сечения тяги . (const) ; (х)- площадь сечения тяги (функция от X); Кд,К|ц - безразмерные коэффициенты. При этом следует отметить, что значения К, и Kjyj на практике можно получить много больше единицы, но и не более нескольких десятков. В предлагаемом же стенде при перемещении точки А (упорной втулки 9) в противоположном направлении со скоростью v закон движения платформы можно определить по формулам, аналогичным (1) и (2), перейдя в другую систему координат, перемещающуюся вместе с точкой А со скоростью v. в этой системе точка А неподвижна, а платформа движется относительно нее с начальнойскоростью. Тогда формулы (1) и (2) будут выглядеть соответственно: . V(Vo+v) KO (3) V(Vo+V) -К(4) Для определения закона движения платформы в неподвижной системе координат необходимо вычесть из величин скоростей, определенных по формулам (3) и (4), значение скоросТИ v. Тогда закон движения платформы будет определяться по формулам: V- VoWHoV-v Ko HKoи для случая с гибкой связью переменного по длине сечения формулой N-Wo- V)KN-V VoKN- v4KN-l). (6) Значения скоростей разгона платформы, определенные по формулам (5) и
(6), значительно выше (при достаточно больших значениях V), чем по формулам (1) и (2), так как значения Кп И KV много больше единицы.
использование изобретения позволяет (путем применения простых технических средств) существенно повысить испытательные нагрузки за счет разгона испытуемого объекта до околозвуковых скоростей и его последующего торможения.
Формула изобретения
Стенд для динамических испытаний изделий по авт. св. 926549, о т личающийся гем, что, с целью повышения достижимой испытательной нагрузки, он снабжен дополнительным разгонным устройством для пе.ремеиения приспособления для захвата гибкой тяги в направлении, противоположном направлению движения платформы .
Источники информации,
принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 926549, кл. G 01 М 7/00, 1980
(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для динамических испытаний изделий | 1980 |
|
SU926549A1 |
| Стенд для ударных испытаний изделий | 1980 |
|
SU938057A1 |
| Стенд для испытаний изделий на воздействие импульса ускорения | 1981 |
|
SU981835A1 |
| Стенд для испытания изделий на воздействие импульса углового ускорения | 1988 |
|
SU1587364A1 |
| Стенд для динамических испытаний изделий | 1990 |
|
SU1791743A1 |
| Центробежный стенд для динамических испытаний изделий | 1977 |
|
SU945705A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ ИЗДЕЛИЙ НА УДАРНОЕ ВОЗДЕЙСТВИЕ. РАЗГОННОЕ УСТРОЙСТВО СТЕНДА. ТОРМОЗНОЕ УСТРОЙСТВО СТЕНДА | 2002 |
|
RU2235302C2 |
| Стенд для виброударных испытаний изделий | 1987 |
|
SU1467415A1 |
| Стенд для испытания изделий на воздействие перегрузок, меняющихся по заданному закону | 1975 |
|
SU636495A1 |
| Стенд для испытания изделий на воздействие угловых ускорений | 1981 |
|
SU970164A1 |
