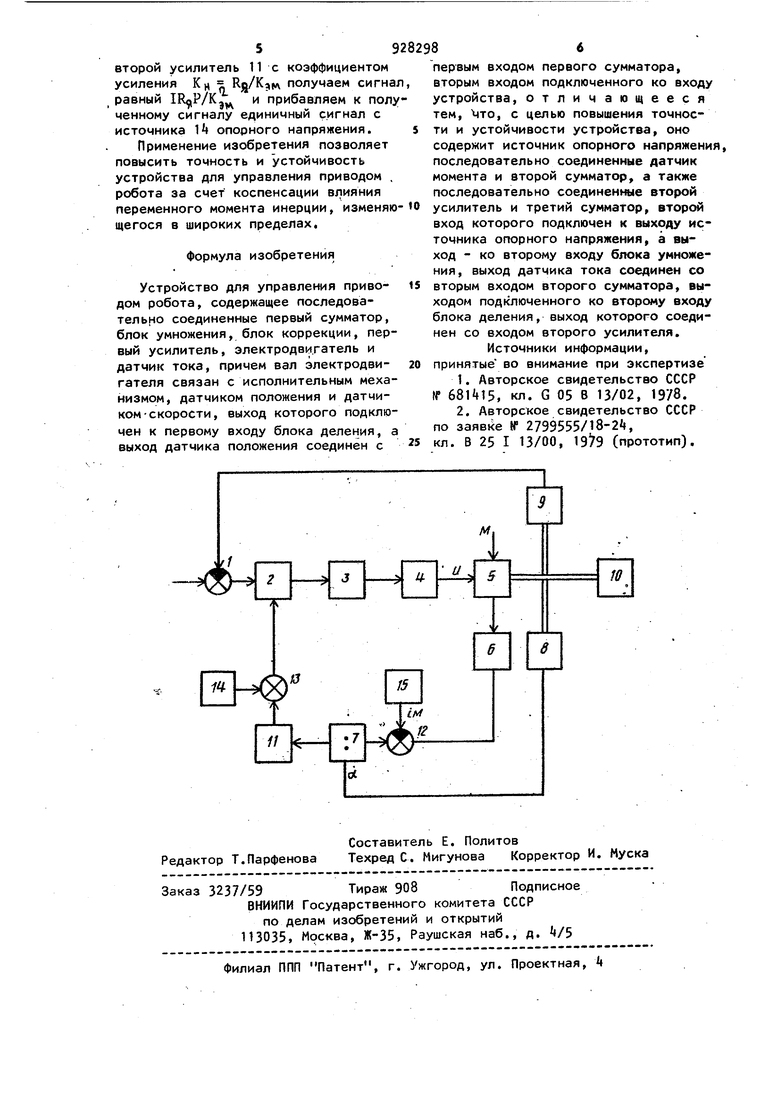
Изобретение относится к робототех нике и может быть использовано при создании устройств управления приводами роторов. Известно устройство для управлени приводом робота, содержащее сумматор блок деления, блок коррекции, регулятор тока, тиристорный преобразователь, блок дифференцирования, блоки выделения модуля, блоки памяти, блок формирования сигнала управления и электродвигатель ГП. Однако устройство сложно и имеет низкую надежность. Наиболее близким к изобретению техническим решением является устройство, содержащее последовательно соединенные первый сумматор, блок умножения, блок коррекции, первый усилитель, электродвигатель и датчик тока причем вал электродвигателя связан с исполнительным механизмом, датчиком положения и датчиком скорости, выход которого подключен к первому вхо/р блока деления, а выход датчика положения .соединен с первым входом первого сумматора, вторым входом подключенного ко входу устройства 2, Недостатками .этого устройства являются его низкая точность и устойчивость при изменении момента инерции нагрузки в широких пределах. Цель изобретения - повышение точности и устойчивости устройства. Для достижения цели, устройство содержит источник опорного напряжения, последовательно соединенные датчик момента и второй сумматор, а также последовательно соединенные второй усилитель и третий сумматор, второй вход которого подключен к выходу источника опорного напряжения, ,а выход ко второму входу блока умножения, выход датчика тока соединен со вторым входом второго сумматора, выходом подключенного ко второму входу блока деления, выход которого соединен со входом второго усилителя. На чертеже представлена функциональная схема устройства. Устройство содержит первый сумматор 1, блок 2 умножения, блок 3 коррекции, первый усилитель k, электродвигатель 5, датчик 6 тока, блок 7. деления, датчик 8 скорости, датчик 9 положения, исполнительный механизм 10, второй усилитель 11, второй и третий сумматоры 12 и 13 соответственно источник Тй опорного напряжения и датчик 15 момента. На чертеже обозна чены сигнал задающего воздейст ВИЯ; - рассогласование (ошибка) электропривода; М моментное врздействие на электропривод; oL, oi - соответственно угол и скорость вращения вала электродвигателя; i - выходной сигнал датчика тока; ifA выходной сигнал датчика момента; U - сигнал управления двигателем. Устройство работает следующим образом. Сигнал ошибки электропривода сЛ с первого сумматора 1 после коррекции в блоке 3 усиливаясь, поступает на электродвигатель 5 приводя его вал во вращательное движение с направлением и скоростью (ускорением), зависящими от знака и вепичины посту пающего сигнала U и внешнего моментного воздействия М. Электропривод робота за счет переменного груза, изменения конфигурации исполнительного органа и за счет взаимного влия ния степеней подвижности друг на дру га обладает переменным моментом инерции I, который может, меняться в широких пределах. Это, как правило вызывает существенное снижение качественных показателей электропривода, приводит к неустойчивости его работы. В результате возникает задача, связанная с обеспечением инвариантности динамических свойств электропривода к изменениям момента инерции нагрузки. Кроме того, для повышения быстродействия электропривода целесообразным является полная компенсация влияния электромеханической постоянной времени системы, влияние которой на быстродействие системы увеличивается при увеличении момента инерции нагрузки на выходном валу двигателя, . Для реализации поставленных задач в известном устройстве предлагается в прямую цепь электропривода вводить сигнал, пропорциональный моменту инерции I, .-риведенному к валу электродвигателя. Этот сигнал с точностью до Ч на некоторых частотах компенсирует влияние переменного I на динамические свойства системы. Однако известное устройство не позволяет точно компенсировать переменный момент инерции I, так-как в прямую цепь электропривода с помощью блока 2 умножения вводится лишь сигнал, пропорциональный величине 1,аэлектродвигатель 5 достаточно точно описывается передаточной функцией ) a.(t)/uct) Кдв/c p+i) X X (Р+ 1). О) Компенсация переменного I в известном устройстве осуществляется лишь в тех случаях, когда -д Q остальных случаях компенсация I осуществляется достаточно приближенно. Кроме того величина I Ъ известном устройстве перед введением ее с помощью блока 2 умножения в прямую цепь привода определяется с большой погрешностью. Для типовых электродвигателей 5 справедливо равенство ()/1Р dL , где 1 якорный ток электродвигателя 5; g электромагнитная постоянная. Из выражения (2) следует I КзцС1-М/Кэ /-d-P. (3) Однако слагаемым М/К при определении I пренебрегается, что и приводит к существенному искажению ее величины, а следовательно, к снижению устойчивости и точности работы скорректированного электропривода. Для более точной компенсации переменного момеита инерции I воспользуемся выражением (1). Исходя из этого выражения следует, что в прямую цепь электропривода необходимо ввести сигнал, равный . Этот сигнал в прямую цепь вводится с помощью блока 2 умножения. Для его получения необходимо поделит1ь сигнал i с выхода 6 тока за вычетом величины датчика с датчика 15 момента, равной .М/К.дцц, на сигнал i , полученный с датчика 8 скорости, получаем сигнал, равный 1Р/Кд„. Затем необходимо пропустить полученный после деления сигнал через
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом робота | 1987 |
|
SU1579770A1 |
| Устройство для управления приводом робота | 1981 |
|
SU996990A2 |
| Устройство для управления приводом робота | 1983 |
|
SU1142810A1 |
| Устройство для управления приводом робота | 1989 |
|
SU1754438A1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 1990 |
|
RU2037173C1 |
| Устройство для управления приводом робота | 1990 |
|
SU1781027A1 |
| Устройство для управления приводом робота | 1985 |
|
SU1405023A1 |
| Самонастраивающийся электропривод робота | 1988 |
|
SU1618643A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1992 |
|
RU2028931C1 |
