Изобретение относится к робототехНике и может быть использовано при создании устройств управления приводами роботов.
По основному авт. св. 928298 известно устройство, содержащее по- . след6вател1;но соединенные первый сумМйГСр, блок умножения, блок коррекции, первый усилитель, электродвигатель и датчик тока, причем вал электродвигателя связан с исполнительным механизмом, датчиком положения и датчиком скорости, выход которого подключен к первому входу блока деления, а выход датчика положения соединен с первым входом первого сумматора, вторым входом подключенного к входу устройства, и, кроме того, источник опорного напряжения, последовательно соединенные датчик момента и второй сумматор, а также последовательно соединенные второй усилитель и третий сумматор, второй вход которого подключен к выходу источника опорного напряжения, а выход - к второму входу блока умножения, выход датчика тока соединен с вторым входом второго сумматора, выходом подключенного к второму входу
блока деления, выход которого соединен с входе второго усилителя Cl 1«
Однако в данном устройстве при ( 5 формировании сигнала коррекции не учитывается сухого- трения, а также момент вязкого трения, поскольку инфОЕЯлация об этих моментах не содержится в выходном сигнале датчика to момента.:
Целью изобретения является повышение точности устройства.
Поставленная цель достигается тем, что устройство содержит нелинейный с элемент и третий усилитель, входы которых соединены с выходом датчика скорости, а выходы - с третьим и четвертым входами второго сумматора соответственно.
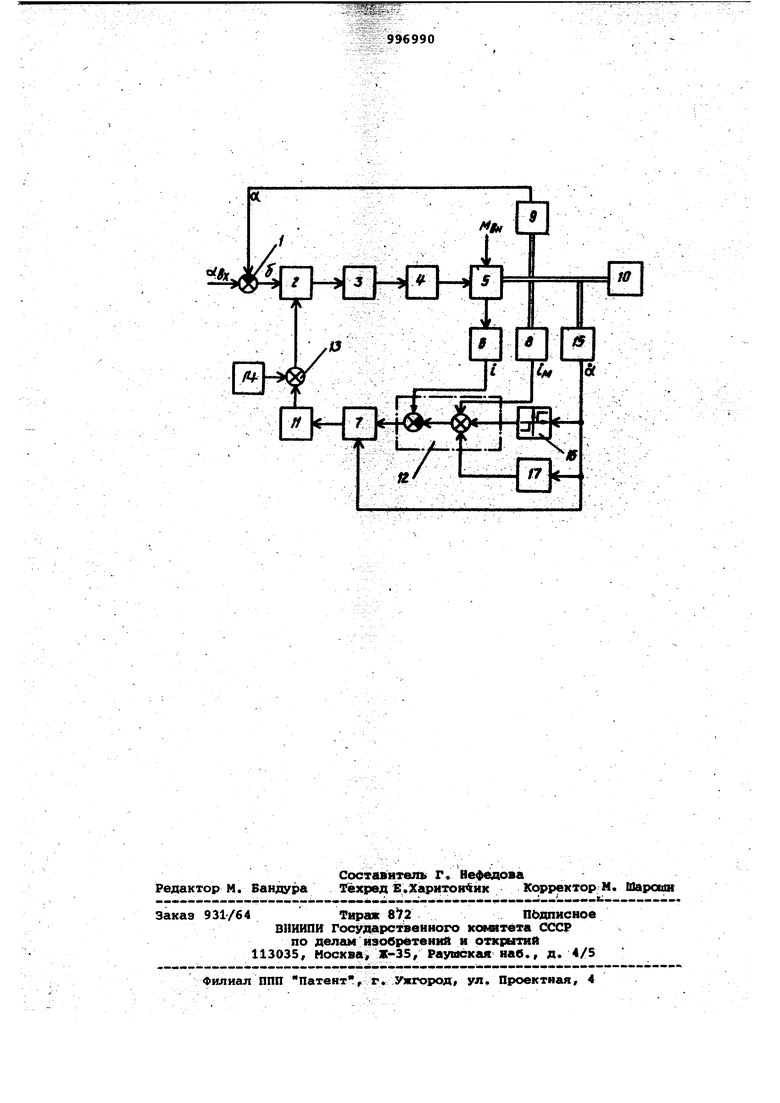
На чертеже изображена функцио20нальная схема устройства.
Схема содержит первый сумматор 1, блок 2 умножения, блок 3 коррекции, первый усилитель 4, электродвигатель
25 5, датчик б тока, блок 7 деления, .датчик 8 момента, датчик 9 положения, исполнительНЕЛй механизм 10, второй усилитель 11, второй итретий сумматоЕШ 12 и 13 соответствен30но,источник 14 .опорного ,, датчик 15 скорости, нелинейный элемент 16, третий усилитель 17. На чертеже обозначено: сигНсш задающего воздействия, «/- рассогласование электропривода; Нем моментное воздействие на электропривод; (lL,A - соответственно угол и скорость вращения вала электродвигателя, i - выжодной сигнсш датчика момента , i - сигнал упргшления двигателем. Устройство работает следунхцим образом. . СигнсШ ошибки электропривода Л с первого сумматора 1 после коррекции в блоке 3, усиливаясь, поступает на электродвигатель 5, приводя его вал во вращательное движение с направлением и скоростью, зависящими от..знака и величины пос тупакяцего сигнала 1 и внешнего мсниенгаого воздействия п Привод робота за счет переменного груза, изменения конфигурации исполнительного органа и за счет взаимного влияния степеней подвижности друг на друга обладает переменным моментом инерции Э, который может ме няться в широких пределах. Это, как правило, вызывает существенное снижение качественных показателей привода, приводит к неустойчивости его работы.В результате возникает задача .связанная с обеспечением инвариаятгности динамических свойств привояа изменениям момента инерции нагрузки Кроме того, для повыпенця быстродей ствия электропривода целесообразным является полная компенсация влияния электромеханической постоянной времени, влияние которой на быстродействие системы, увеличивается при уве личении момента нагрузки на выход-. ном валу двигателя. Для реализации поставленных за-: дач в прототипе предлагается в прямую цепь электропривода вводить сиг нал .р,„ где я активное сопротивление якорной обмотки электродвигателя;электромеханический коэфф циент пропорциональности/ Р - симовап дифференцирования Однако в процессе определения си нала К в прототипе пренебреггшось м ментами сопротивления, которые датч момента измерить не может. Эти моенты существенно уменьшают точность, которой осуществляется компенсация еременной величины J . Известно, что M.,iK., |st4;nci+W,{2) де Мдд-суммарный момент, развиваемый исполнительным двигателемМр - момент сухого трения,f - коэффициент вязкого трения. Исходя из выражения (2), можно по-, учить .(-%H/S«-|Mc.Tf l 4 if/S«-f-i/K,)f«. .( Для получения сигнала К (выражение (1) согласно выражению (3)) необходимо из сигнала i с выхода датчика 6 тока вычесть величины МРМ/КЭ с вьрсода датчика 8 мсэмента, yMr.Tp/sieynoi;/ Kj, с выхода нелинейного (типа реле) элемента 16 и fi/Kg с выхода третьего усилителя 17. Полученный сигнал необходимо поделить на сигнал с с датчика 15 скорости (получим сигнал, равный JP/КJM). Затем полученный после .деления сигнал необходимо пропустить через второй усилитель 11 с коэффициентом усиления Kxt sRoKjM (получим сигнал, равный и прибавить к полученному сигналу единичный сигнал с источника 14 опорного напряжения. Применение предлагаемого изобретения, позволит за счет лучшей компеисгщйи переменного момента инерции электродвигателя повысить Точность устройства. Формула изобретения УстЕЮйство для управления приводе робота по авт.св. №928298, о тл и чающееся тем, что, с целью .повьшения точности устройства, оно содержит нелинейный элемент и третий усилитель, входы которых соединены с выходом датчика скорости, а выводы - с третьим и четвертым входами ВТОРОГО сумматора соответственно. . Источники информации, ;принятые во внимание при экспертизе 1. Авторское свидетельство СССР 928298, кл. Ci 05 В 11/00, 1982 .(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления приводом робота | 1987 |
|
SU1541554A2 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2397529C2 |
| Устройство для управления приводом робота | 1983 |
|
SU1142810A1 |
| Устройство для управления приводом робота | 1980 |
|
SU928298A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД РОБОТА | 1990 |
|
RU2037173C1 |
| Устройство для управления приводом робота | 1985 |
|
SU1405023A1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
| Самонастраивающийся электропривод робота | 1988 |
|
SU1618643A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРИВОДОМ РОБОТА | 1992 |
|
RU2028931C1 |
| Устройство для измерения нагрузочного момента электропривода | 1981 |
|
SU993058A1 |