(54) УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и управления технологическим процессом тренировки и испытаний фотоэлектронных умножителей | 1986 |
|
SU1325516A1 |
| Устройство для контроля и управления технологическими процессами испытаний и тренировки фотоэлектронных умножителей | 1988 |
|
SU1517041A1 |
| Устройство для управления автооператорами гальванических линий | 1979 |
|
SU877474A1 |
| Устройство для управления технологическим процессом | 1982 |
|
SU1166138A1 |
| Информационно-управляющая система центрального теплового пункта жилых общественных и промышленных зданий | 1987 |
|
SU1511751A1 |
| Установка для нанесения гальванопокрытий | 1984 |
|
SU1196422A2 |
| АВТОМАТИЗИРОВАННАЯ РЕЗЕРВИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ ЗАПРАВКОЙ КРИОГЕННОГО РАЗГОННОГО БЛОКА | 2001 |
|
RU2216760C2 |
| УСТРОЙСТВО МОНИТОРИНГА ИНФОРМАЦИОННОГО ТРАФИКА | 2020 |
|
RU2740534C1 |
| Многоканальный регулятор тепловых процессов (его варианты) | 1980 |
|
SU943667A1 |
| Устройство для централизованного контроля параметров | 1988 |
|
SU1603400A1 |
1
Изобретение относится к кштрольноиамерительной технике и может быть иопрльзовано в автоматизированных сисге мах управления технологическими процдссами.
Известно устройство цля контроля itiaipaMeTpoB, соаержащее блок оатчиков, .коммутатор, аналогон1ифровой преобразовагель, вычислитель, блок иноикации и едок памяти
Оцнако это устройство имеет низкую точность контроля параметров, изменяю- ших свое значение во времени, так как 1(рнтроль параметров, значения которых нахоцятся в установленной зоне, произрооится циклически и момент контроля не зависит от динамических характеристик объекта контроля. Возможный выхоа значений параметра из установленной зоны в течение времени после контроля аараметра и цо окончания контроля ()льных параметров не обнаруживается.
Наиболее близким к изобретению по 1х хннческой сущности и аости гаем ому
результату явл51егся система апя автом тического контроля параметров, соцержа- шее послеа(жагельно соепиненные блок датчиков, коммутатор, цифровой преобразователь, вычислитель, блсж анаш1за и блок иноякааии, причем вычислитель и / блок анализа подключены к блоку памяггиГ2,
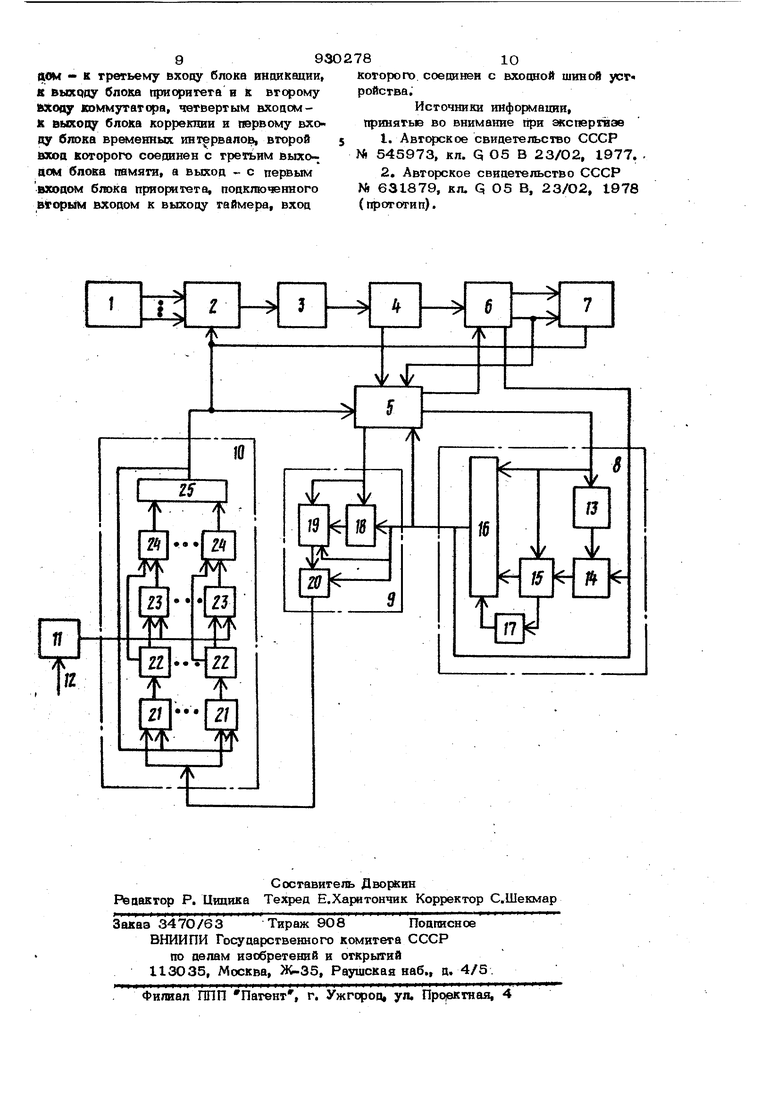
Недостатком ижестного является низкая достоверность контроля параметров, регулируемых испотвительным механизмом и изменякЯцихся во времени, что обуслсе- лено необхогомостью в течение времени пякла кш1роля измерять по заданной программе все параметры, значения которых находятся в устанселенной зоне, независимо от пввш «ических характервс тик объекта конгрошь В течение временя онкла контроля всех парамегроб, данный параметр после его контроля может изменить СВО6. значение так, что выйдет не установленной зоны. Однако устройство не позволяет производить очередной анализ этого- параметра до окончания цикла. 393 Цель изобретения - повьпиение цосговерносги контроля технологических пара-мегров за счет прогнозирования измененения состояния технологических парамет ров. Поставленная цель достигается тем, что в устройство цля автоматического контроля технологических параметров, содержащее блок датчиков, соединенный выходами с первыми входами коммутатора, соединенного выходом через преобразователь с входом вычислителя, соединенного первым выходом с первым входом блока памяти, подключенного первым выходом к первому входу анализатора, которого соединен с вторым выходом вычислителя, первый и второй выходы - с соответствующими первым и вторым входами блока индикации, введены таймер, блок приоритета, блок временных интервалов и блок коррекции, первый вход которого соединен с третьим вькодом анализатора, а второй вход - с вторым вь ходом блока памяти, подключенного вторым входом к второму выходу анализатора, третьим входом - к третьему входу блока индикации, к выходу блока приоритета и к второму входу коммутатора, четвертым входом к выходу блока коррекции и первому входу блока временных интервалов, второй вход которого соединен с третьим вькодом блока памяти, а выход - с первым входом блока приоритета, соединенного вторым входом с выходом таймера, вход которого соединен с входной шиной устройства. На чертеже приведена структурная схема устройства. Устройство содержит блок I датчиков, коммутатор 2, цифровой преобразователь 3, вычислитель 4, блок 5 памяти анализатор 6, блок 7 индикации, блок 8 коррекции, блок 9 временных интервалов, блок Ю приоритета, таймер 11 и входную шину 12, Блсж 8 коррекции содержит блок 13 вычитания, блок 14 деления, блок 15 ум ножения, выходной регистр 16 и элемент 17 задержки. Блок 9 временных интервалов содержит блок 18 вычитания, блок 19 делени и блок 20 умножения. Блок Ш приоритета содержит по коли честву технологических параметров элементы 21 совпадения, регистры 22, элементы 23 сравнения, выходные регистры 24 и элемент 25 выборки. Устройство работает следующим образом. второй вход j5 «назначенного для регулирования соответст- 8 В исходном состоянии сигналы имеются только на выходах блока 1 датчиков. Величины их соответствуют значениям контролируемых с помощью блока I дат- чиков технологических параметров. В блоке 5 памяти в соответственно выделенных дл-я верхнего и нижнего уровней каждого технологического параметра ячейках памяти записана информация о предаварийном и аварийном значениях параметра, о постоянных величинах, характеризующих динамику изменения параметра, а также информация о включенном или выключенном состоянии исполнительного механизма, предвуюшего технологического параметра. Регистры 22 обнулены. При подаче на входную шину 12 устройства сигнала Пуск таймер 11 начинает отсчитывать текущее время, которое поступает на второй вход блока 10 приоритета. Так как в начале работы регистры 22 обнулены, то срабатьшают все элементы 23 сравнения, по сигналам которых выходные регистры 24 одновременно выдают на элемент 25 выборки все номера параметров вместе с сигналами коррекции, которые поступают с вторых выходов регистров 22. Так как регистры 22 обнулены, то сигналы коррекции имеют нулевой потенциал. Элемент 25 выборки выдает код наименьшего номера параметра с кодом сигнала коррекции, т.е. Код номера первого параметра, который поступает на вторые входы элементов 2 1 совпадения, на второй вход коммутатора 2и третий вход блока 7 индикации, а вместе с кодом сигнала коррекции на третий вход блока 5 памяти. Коммутатор 2 подключает к цифровому преобразователю 3датчик первого параметра, а в блске 5 памяти и в блоке 7 индикации подготавливаются к работе соответствующие регистры памяти и ячейки индикации. .Цифровой преобразователь 3 для уменьшения влияния помех и сбоев фиксированное число раз преобразовывает сигнал с первого датчика в цифровой сигнал, поступающий да вход вычислителя 4, который определяет среднее значение параметра, исходя из выражения: .,-(i) где У - среднее значение первого технологического параметра; Х- - значение технологического .параметра при 1 -ом измерении; ri - число измерений. После определения Х вычислитель 4 выдает это значение в виде цифрового
сигнала на блок 6 анализа и в блок 5 памяти, где сяо зfшo fинaeтcя. После прихода сигнала с вычислителя 4 происходит считывание информации с первого выхоца блока 5 памяти в блок б анализа о предаварийных РХ,И аварийных 3( Q, значениях контролируемого параметра по верхнему уровню.
БЛОК 6 .анализа сравнивает Х с Х-р и Xclg,. Так как в начале работы значение контролируемого параметра находится ни же номинального значения, то .с второго выхода блока 6 анализа сигнал не поступает, что соответствует включенному исполнительному механизму. Одновременно блок б анализа вырабатывает разность
cSB-i nP ,-, л-7 Л
йХ
которая поступает через блок 8 коррекции, на второй вход блока 20 умножения. Так как на третий вход блока 5 памяти поступил сигнал коррекции, равный нулю, то XY и постоянные величины, характеризующие динамику изменения контролируемого параметра, через время зацержки поступают на блок 8 коррекции не с второго выхода блока памяти 5, а с третьего выхода блока 5 памяти на второй вход блока 9 временных интервалов для вычисления временного интер вала. На второй вход блока 18 вычитааия поступает наибольшее возможное значение первого параметра Х, Где происходит вычитание по модулю. На второй вход блока 19 деления поступает постоянная времени изменения первого параметра при включенном исполнительном механизме /t. С выхода блока 9 вычисления временных интервалов получается интервал времени, через который будет осуществляться очередной контроль первого параметра, который вычисляется по формуле:
,
Значение (х;тупает на первый вход блока 10 приоритета. Код номера первого параметра, поступая на вторые входы элементов 21 совпадения, открывает первый элемент 21 совпадения. Значение Д через первый элемент 21 совпадения записывается в первый регистр 22. С регистра 22 значение Д поступает на первый элемент 23 сравнения, rcie суцмируется с текущим временем, посту паюшим с таймера 11. На этом цикл контроля первого параметра з аканчивается. Затем аналопичнык-г образом контролируется второй, третий и т.д. параметры до I тех пор, пока таймер 11 не отсчитывает время, равное времени очередного контроля j -го параметра. Срабатывает J -ый элемент 23 сравнения, соответствующий ему выходной регистр 24 выдает коц номера j-го параметра вместе с сиР0 налом коррекции, который равен единице, так как в j -м. регистре 22 записан какой-то интервал времени. С выхода элемента 25 выборки код номера j-го параметра поступает на коммутатор 2,
5 блок 7 индикации и на элементы 21 совпадения, разрещая запись следующего интервала времени в j -и регистр 22. На третий вход блок 5 памяти поступает код номера j -го параметра вместе
Q с сигналом коррекции, который записььвается в регистр, соответствующий этому параметру. Работа коммутатора 2, цифрового преобразователя 3,, вычислителя 4, блока 5 памяти и блока 6
5 анализа гфоисходит аналогично. Прт повторном контроле возможны два еду- чая: Контролируемый параметр не постиг прецаварийного значения контролируемый параметр аходится в зоне
0 Wr
В первом случае с второго выхода
блока б анализа сигнал не поступает, что соответствует включенному исполнительному механизму, а с третьего выхода на блок 8 коррекции поступает uXj. На вто- .
рой этого блока с второго выхода блока 5 памяти поступают величины, характеризующие штнамику изменения ковт ролируемого параметра при включенном исполнительном мехатзме через время заоержки, вь ранное больше времени ср батывания блока 6 анализа для вычисли . нкя новой портоянной времени .1 На блок 13 вычитания поступают среонее значение параметра, полученное в прецы оущем цикле контроля Xj н Xj , где происходят вычитание по модулю. На второй вход блока 15 умножения поступает посто5шная времени изменения J-ro параметра tj.: . После вычисления новой по стоянной временн til:, которая рассчитыва-i ется по формуле
ЛХ;
V -JTrrf;
она с ttepBoro выхода блока 15 умножения поступает на первый вход выходного регистра 16, куда с frpoTbert) выхода блока В памяти поступает наибольшее возможнов значение j-го параметра Aj и сред Н9© вначение этого параметра j . Ооноврвменно после вычисления с вгорого Ёыхоаа блока 15 умножения выдается сиг нал через элемент 17 задержки (время задержки больше времени записи L.J) в выходной регистр 16 на третий вход, по Которому новое значение (.j с этого регастра поступает на четвертый вход блока 5 памяти, где записывается на мес-1 ТО старого значения, и одновременно пос тупает вместе с другими величинами на блок 9 временных интервалов, где вычисляется интервал времени, через который производится очередной контроль j-ro параметра, по формуле (3). Дальнейшая работа устройсша аналогична описанному. Во втором рдучае с второго выхода блока 6 анализа выдается сигнал, по которому. выключается исполнительный механизм , включается ячейкаЪигнализашго предаварийного значения j -го парамет ра в блоке 7 индикации, ив блоке 5 памяти обнуляет ячейку, в которой был записан сигнал коррекции. Так как исполнительный мехавмзм выключается и сигнал коррекции отсутствует, то величины, характеризующие динамику изменения контролируемого параметра при вь ключенном исполнительном механизме, поступают с третьего ввкода блока 5 помяти на второй вход блока 9 временных интервалов, осуществляется вычисление ин тервала времени, через который пршзводатся очередной контроль, по формуле %-j ДХ, (5) х.-в, где. В, j - наименьшее возможное значе ние J- го параметра; - постоянная времени изменения j-ro параметра при выключенУ .ном исполнительном механизме .--351--5й разность, поступающая с ояок 6 анализа через блок 8 кор рекции на блок 2О умнгокен Эгот интервал времени записывается в блоке 10 приоритета в соответствукяций регистр 22. После истече ния A-fc q.j вновь произьопится контроль 5 -го параметра. Ее/и значение J- го параметра находитс5г в зоне номинальных значений, т,е. не допло до нижнего предаварийного значения, производится корректировкав новое значение записывается в блок 5 памяти. Если зна- 5вние го параметра достигает нижне930788 го предавартйного значения, то происходит включение исполнительного механизма и расчет интервала времени ,после которого J-и параметр достигает верхнего федаварийного значения и т.д. С первого выхода блока 6 анализа появляется сигнал в с;огчае аварийного значения параметра и поступает на первый вход блока 7 индикации. Включается ячеика сигнализации аварийного значения. Исполнительный механизм регулирования контролируемого параметра выключается. В течение рассчитанного для параметра интервала времени контроль его не производится. Приоритет контроля параметров обеспечивается временем очередного контроля каждого параметра, а при их равенстве - порядковым номером параМетра с помощью элемента 25 выборки. . Таким образом, в процессе работы устройства постоянные величины для каждого параметра уточняются всякий раз, когда оказывается в области номинальньк значений, за исключением первого цикла контроля и при переключении исполнительного механизма. Это приводит к тому, что контролируемый технологический параметр всегда через рассчитьюаемые интервалы времени будет достигать области значений, лежащей между и X(.|g, в которой требуется переключение исполнительного механизма, что и яо оляет повысить достоверность ксжт- роля. Формула изобретения Устройство для автоматического контроля технологических параметров, содержащее блок датчиков, соединенный выходами с первыми входами коммутатора, соединенного выходом через преобразователь с входом вычислителя, соединенного первым выходом с первым входом блока памяти, подключенного первым выходом к первому входу анализатора, второй вход которого соединен с вторым выходом вычислителя, первый и второй выходы - с соотве ствующими первым и вторым входами блока индикации, отличающееся тем, что, с целью повышения достоверности контроля, в него введены таймер, блок приоритета, блок временных интервалов и блок коррекции, первый вход которого соединен с третьим выходом анализатора, вторсй вход - с вторым выходом блока памяти, подключенного вторым входом к второму выходу анализатора, третьим вхоаом - к третьему вхооу блока инсшкации, к выхцоу блока приоритета в к второму Mtoajr коммутатора, четвертым входомК вьосопу блока корректши и первому вхо оу блока временных интервалов, второй ьэсоа которого соеоинен с третьим выхо-; аом блока памяти, а выход - с первым входом приоритета, подключенного вторым входом к выходу таймера, вход
KoTopotX) соединен с входной шиной уст« ройства.
Источники информации, принятые во внимание при экспергиае
М« 545973, кл. Q О5 В 23/02, 1977.
N 631879, кл. Q 05 В, 23/О2, 1978 (прототип).
