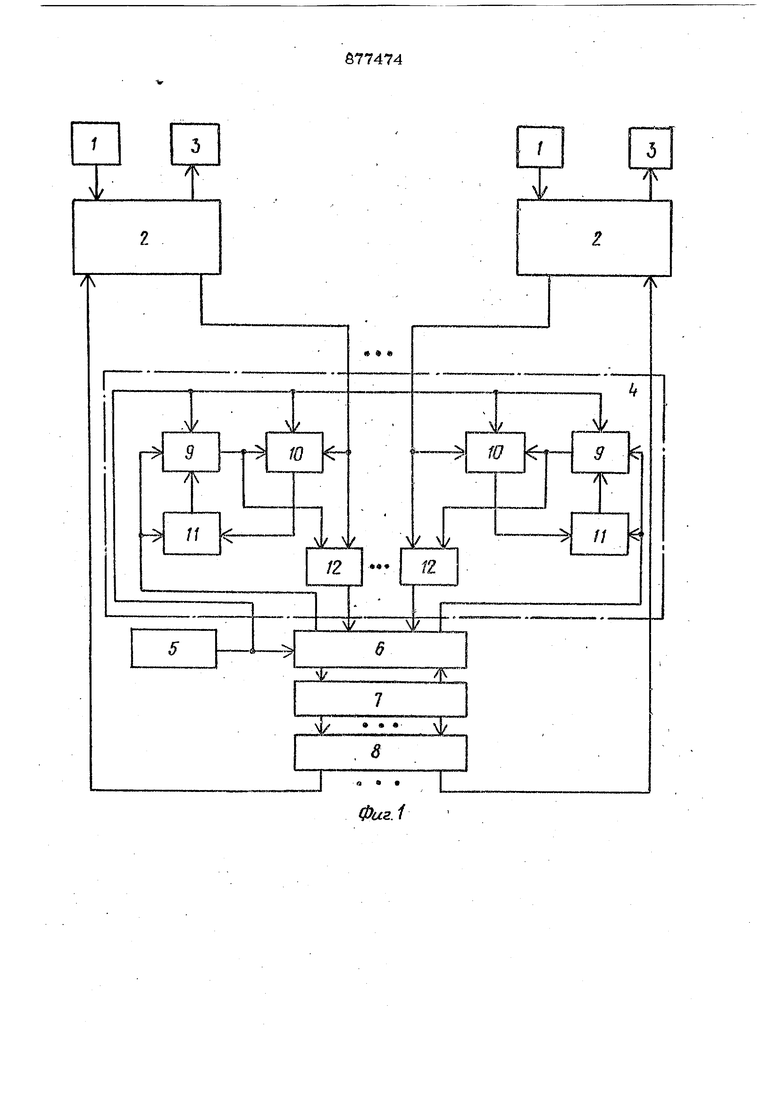
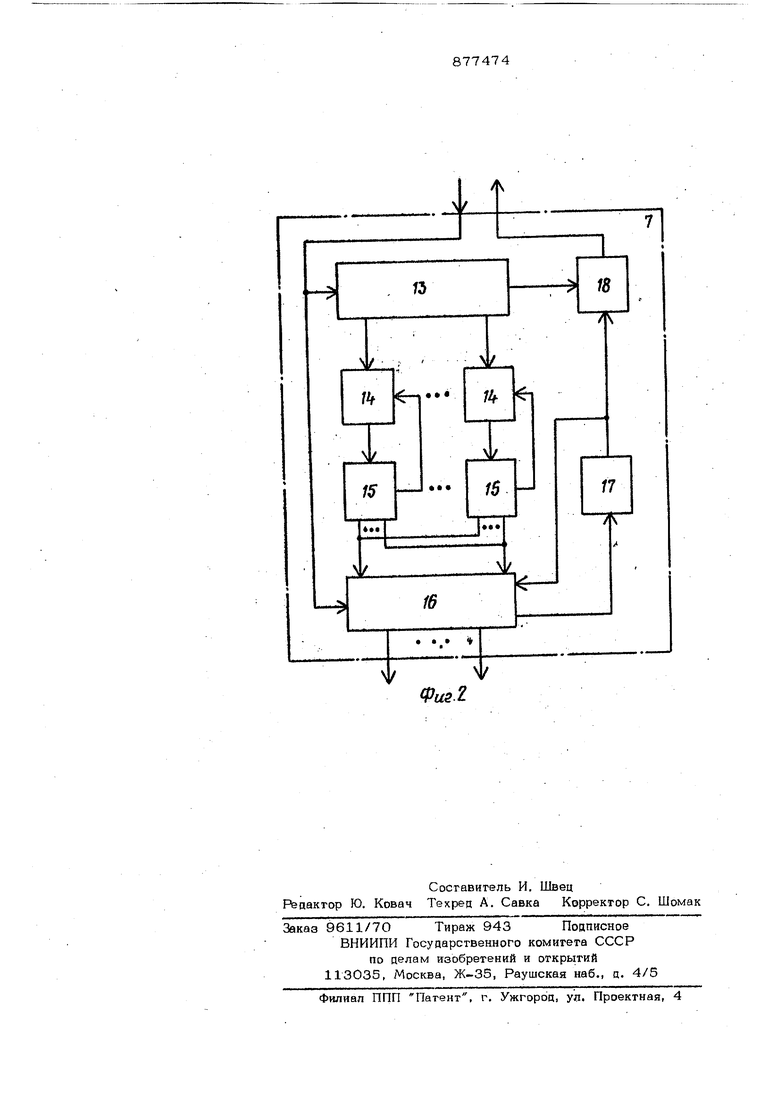
(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТООПЕРАТОРАМИ Изобретение относится к автоматике и вычислительной технике и может исполь зоваться для управления автооператорами гальванических линий. Известен командоаппарат для управления автооператорами гальванических линий содержащий блок памяти, центральное устройство управления, диспетчерский пункт, устройство регистрации и ввода и устройство связи с автооператорами 111 . Это устройство позволяет управлять группой автооператоров и также обеспечивает отработку автооператорами заданных временных интервалов, однако в нем отсутствует временной контроль отработки автооператорами команд движения, что может привести к нарушению технологического режима и появлению брака. Наиболее близким к предлагаемому по технической сущности является устройство для управления автооператорами гальванических линий, содержащее датчики горизонтального и вертикального положений, счетчик, две схемы сравнения, блок ввода ГАЛЬВАНИЧЕСКИХ ЛИНИЙ адресной информации, исполнительный блок, схему И, таймер, блок приоритета, блок формирования упрешляющей информащш и коммутатор. Это устройство . управлять группой автооператоров, а такHte контролировать длительность выполнения команд движения. Наличие временного контроля перемещений автооператоров обеспечивает возможность оперативного обнаружения сбоев и исключения из числа обслуживаемых тех автооператоров, которые не обеспечивают заданных временных характеристик 2 . Однако данное устройство не позволяет компенсировать вли5шие опозданий автооператоров на процесс осаждения металла в основных -ваннах,, для которых заданное время деталей согласно требованиям техпроцессов должно поддерживаться с высокой точностью (отклонение времени в ту или другую сторону приводит к браку) за счет допусков на время выдержки деталей во вспомогательных ваннах, длительность которых может 38 1..|р1,ироваться Б широких пределах без снижения качества гальванопокрытий, что приводит к прерыванию процесса гальвапообработки и снижению качества гальванопокрытий. Цель изобретения повыигение точнос ти устройства. Указанная цель достигается тем, что в устройство для управления автооператорами гальванических линий, содержащее последовательно соеданешсые таймер, блок приоритета, блок формирования управляющих команд, коммутатор и по каждому каналу управления посл.едовательно соединенные блок датчиков положения и блок связи, вторыми ходами подключенных к выходам коммутатора, в каждый канал управления введены счетчик времени, блок контроля, блок коррекции и элемент И, первый вход которого соединен с первым выходом блока связи и первым входом счетчика времезш, вторьтм входом подключенного к выходу таймера и первому входу блока контроля, третьим входом - к выходу блока контроля и второму входу элемента И, выход которого соединен со вторым входом блока приоритета, вторым выходом соединенного с первым входом блока коррекции и вторым входом блока контроля, третий вход которого через блок коррекции связан с выходом счетчика времени. На фиг. 1 представлена схема устройства для управления автооператорами гальванических линий; на фиг. 2 - схема блока. формирования управляющих команд. Устройство содержит для каждого оператора блок 1 датчиков положезшя, блок 2 связи, истгол}штельный блок 3, а также блок 4 компенсации, таймер 5, блок б приоритета, блок 7 формирования управляющих команд и коммутатор 8i Блок 4 компенсации содержит блок 9 контроля, счетчик Ю времени, блок 11 коррекции к элемент И 12. Блок 7 формирования управляющих команд (фиг. 2) содержит дещифратор 13, регистры 14 сдвига, блоки 15 памяти, регистр 16 вывода, элемент 17 задержки и триггер 18, Блоки 1 датчиков предназначены для фиксации положения автооператоров при горизонтальном и вертикальном перемеще ниях. Зтн блоки содержат датчики верхнего и нижнего положений автооператора на горизонтальной оси перемещения. Блоки 2 связи предназначены для выдачи ущ)авл$пощих воздействий на горизои тапьный и вертикальный двигатели авто4оператора, находящиеся в испопт1трлыюм блоке 3, и организации сигнала Останов после окончания движения автооператора. Каждый блок 2 связи содержит блок ввода адресной информации, двоичный счетчик, две схемы сравнения и элемет- И. Блок 4 компенсации предназначен для оперативного выявле}шя сбоев (опозданий) в работе автооператора и их компенсации за счет допусков на выдержки времени во вспомогательных ваннах. Таймер 5 предназначен для отсчета и выдачи значений времени. Блок 6 приоритета предназначен для определения номера автооператора, подлежащего обслуживанию, и создания очереди, автооператоров, ожидающих обслуживазгая. Блок 6 содержит регистры очередного времени обращения по каждому автооператору и схему выборки. Регистры осуществляют передачу в блок 4 компенсации информационного слова, содержащего временные параметры тезгу7дей операции, просуммировазгаого с текущимзначением таймера 5. Времезшые параметры содержат время выполнения операции, время выдержзш и допуск на выдержку деталей в ваннах. Схема выборзш осуществляет выборку и передачу в блок 7 номера автооператора с наименьшим очеред1Ш1м временем обращезшя (если таких автооператоровНесколько, передается наименьший номер). Блозс 7 формирования управлязощих комазад предназначен для запомз1нания и хранезпш закодировазшьзх в двоичной системе счислезшя дизотограмм перемещения автооператорйв, подключезшьзх к устройству. Цизшограмма для каждого автооператора отображает упорядочезшую последовательность элементарзвых операций. Закодиро- ванная элементарная операция представляет собой десятиразрядзюе информационное слово, содержащее код адреса следовазшя автооператора (шесть разрядов), код коглаз д горизонтального -движезтя (два разряда) и код команд вертикального движения (два разряда). Каждая элементарная операция идентифизотруется своим номером. Коммутатор 8 предназначен для коммутирования управляющих команд по автооператорам.; Блок 9 контроля зтредназначен для выдачи сигнала после истечезшя текущего времезш, необходимого для выполнезшя элементарной операции, или заданной длительности выдержки деталей в вазше (выстоя автооператора). Счетй К 10 времею служит для форми рования времени опозда1шя при выполнеШ1И автооператором aneh/eiiTapHofi операции Блок 11 коррекции предназначен для уменьшения допуска на выдержку во вспомогатепьных ваннах на время опоздания автооператора и выдачи скорректированного допуска в блок 9. Предлагаемое устройство работает следующим образом, В исходном состоянии разрешающим сигналом для начала работы автооператора является сигнал Пуск, поступающий из блока 2 в блок 6 (на схеме сигнал не по казан). По этому сигналу происходит запись значения таймера 5 в регистр очере ного времени обращения соответствующего автооператора и запуск схемы выборки, 1 Результатом работы схемы выборки блока 6 является код номера очередного обслу- живаемого автооператора, который в случае поступления сигнала Тотов из бло-. ка 7 запускает его. В случае отсутствия ; сигнала Тотов, что соответствует занятости блока 7, цикл работы схемы выборки повторяется через интервал времени, соответствующий наименьшей дискретности таймера 5, При поступлении на вход блока 7 кода номера очередного обслуживаемого авто- оператора дешифратор 13 выдает сигналы на соответствующий этому номеру регистр 14 и на триггер 18, который изменяет свое состояние, снимает сигнат Тотов. В регистре 14 возбуждается первый разряд, который формирует импульс, поступаю щий в блок 15, При поступлении первого импульса блок 15 выдает код элементарной операции, соответствующий этому импульсу; на регистр 16, Регистр 16 к коду элементарной операции приформировывает код номера обслуживаемого автооператора, поступающего с вывода блока 6 и передает управляю щую информацию на вхоаы коммутатора 8:С первого выхода регистра 16 поступает сигнал через элемент 17 на триггер 18, вызывающий восстановлеьше сигнала Готов, С элемента 17 на третий вход регистра 16 поступает сигнал, который переводит . его в исходное состояние, Тшсим образом блок 7 готов к приему следующего кода номера автооператора. Коммутатор 8 адресует информационное слово очерешюй элементарной операции в блок 2, номер которого указан блоком 7, В блоке 2 информационное слово поступает в блок ввода адресной информации. При оргагшзацки ЦБИже1гая в блок 9 поступает задатаюе время вьшолисния автооператором из блока 6 приоритета одновременно с постутше1шем в блок 7 кода номера этого автооператора. Из блока ввода адресной информации команда горизонтального движения (Вперед или Назад) поступает на двоичный счетчик, который в зависимости от поданной команды производит сложение или вычитание импульсов, поступающих от датчика горизонтального положения. Шестиразрядный двоичный код положения автооператора с Двоичного счетчика поступает на первый вход первой схемы сравнения. Схема сравнения сравнивает код положения автооператора с кодом адреса, поступающим и блока ввода адресной ин формации, и выдает команду Вперед, если код положения автооператора меньще i кода адреса. Если код положения больще кода адреса, выдается команда Назад. Исполнительный блок 3 отрабатывает эти команды. При равенстве кодов схема сравнения команд не выдает, двигатель горизонтального движения останавливается и на элемент И выдается сигнал Останов.. Выдача сигналов Останов по вертикальHOivTy двигателю происходит аналогичным образом. Вторая схема сравнения анализирует двухразрядный двоичный код, поступающий из блока датчиков с датчиков верхнего и низшего положений, с двухразрядным кодом, поступающим с блока ввода адресной информации. Сигнал ОстаноБ, с блока 2 поступает на второй вход &п&мента И 12. В процессе реализации очередной операции блоком 9 осуществляется сравнение значения таймера 5 с заданным временем ее выполнения, поступающего из блока 6, При сравнении значения таймера 5 с заданным временем выполнения операций блок 9 запускает счетчик 1О времени и выдает СИГНЕ1Л на первый вход элемента И 12. После выполнения команды, автооператором сигнал Останов, поступающий из блока 2, запрещает счет времени опоздания в счетчике 10 и разрешает вы дачу очередного запроса на следующую операцию.- Если c4eT4nKjOM 1О зафиксировано опоздание, то числовой код, соответствующий времени опоздания (оп записывается в блок 11. При организации выстоя автооператора блок 9 поступает величина времени выдержки деталей в ванне, в блок 11 поступает величина допуска на время выдержки ( олиоврем{;ино с поступлением в блок 7 номера этого автооператора, которое формирует информационное слово, не содержащее команд движения. В блоке 11 происходит вычитание АОП ОП-ДЬСкорректированное время fl-t поступает в блок 9, где суммируется с временем выдержки деталей в ванне. После сравнения откорректированной выдержки со значением таймера блок 9 выдает сигнал на элемент И 12, который разрешает вы дачу очередного запроса на операцию. Таким образом, происходит компенсация опозданий автооператора. Работа устройства осуществляется циклично, поэтому следующий цикл работы повторяет описанный. Использование предлагаемого устройства обеспечивает возмолшость при груп повом управлении автооператорами осуществлять корректировку временных интервалов выдержки деталей в основных ваннах при наличии сбоев (опозданий) автооператоров за счет допусков на врем обработки деталей во вспомогательных ваннах и тем самым повысить точность отработки заданного времени и качества гальванопокрытий, формула изобретения Устройство дпй управления автоопера торами гальванических линий, содержаще 74И последовательно соединенные таймер, блок приоритета, блок формирования управляющих команд, коммутатор и по каждому каналу управления последовательно соединен- ные блок датчиков положения и блок связи, вторыми входами подключенных к вь ходам коммутатора, отличающееся тем, что, с целью повышения точности устройства, в него введены в каждый ка- нал управления счетчик времени, блок контроля, блок коррекции и элемент И, первый вход которого соединен с первым выходом блока связи и первым входомсчетчика времени, вторым входом подклю- ченного к выходу таймера и первому входу блока контроля, третьим входом - к выходу блока контроля и второму входу элемента И, выход которого соединен со вторым входом блока приоритета, вторым выходом соединенного с первым входом блока коррекции и вторым входом блока контроля, третий вход которого через |блок коррекции связан с выходом счетчика времени. Источники информации, принятые во внимание при экспертизе 1; Авторское свидетельство СССР № 410131, кл. а 23 В 5/08, 1968. 2. АвторсйЬе свидетельство СССР по заявке № 2675658, кл. Q 05 В 19/18, 1978 (прототип).
Фаг.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления авто-ОпЕРАТОРАМи гАльВАНичЕСКиХ лиНий | 1978 |
|
SU807221A1 |
| Устройство для программного управления автооператорами гальванической линии | 1987 |
|
SU1429089A1 |
| Устройство для управления автооператорами гальванических линий | 1986 |
|
SU1327061A1 |
| Устройство программного управления автооператорами гальванической линии | 1980 |
|
SU943337A1 |
| Система управления многопроцессной линией гальванопокрытий | 1976 |
|
SU653308A1 |
| Многопроцессная линия гальванических покрытий | 1988 |
|
SU1585396A1 |
| Установка для управления автооператорами гальванических линий | 1978 |
|
SU749946A1 |
| Устройство программного управления автооператорами многопроцессных автоматических линий гальванопокрытий | 1982 |
|
SU1081243A1 |
| Устройство для управления автоматическими линиями | 1977 |
|
SU744472A1 |
| Устройство для программного управления | 1982 |
|
SU1057925A1 |