I
Изобретение относится k автоматике и вычислительной технике и может быть использовано в системах преобразования информации.Известен преобразователь угла в код, содержащий чувствительные и задающий элементы, формирователь тактовых импульсов, элементы И, триггеры и селектор импульсов.
Инверторы, элементы И и триггеры обеспечивают логическое дифференцирование огибающих, поступающих на его входы, а также распределение счетных импульсов по каналам прямого и обратного вращения в зависимости от направления вр |щения СООднако увеличение числа счетных импульсов в этом преобразователе приводитК уменьшению интервала между ними, что в свою очередь приводит к снижению помехоустойчивости, и, следовательно, к снижению точности преобразователя.
Наиболее близким техническим решением является преобразователь угла поворота вала в код, содержащий синусно-косинусный датчик угла, суммовычитающее устройство, четыре ф 3рмирователя, логический блок формиро ания и распределения счетных импульсов на элементах ИЛИ-НЕ и И,
Выходы датчика угла соединены с входами группы формирователей и вхо10дами суммо-вычитающего устройства, соединенного выходами с входами Другой группы формирователя. Выходы групп формирователей соединены с входами логического блока формирова15ния счетных импульсов, выходы кото.рого являются выходами.
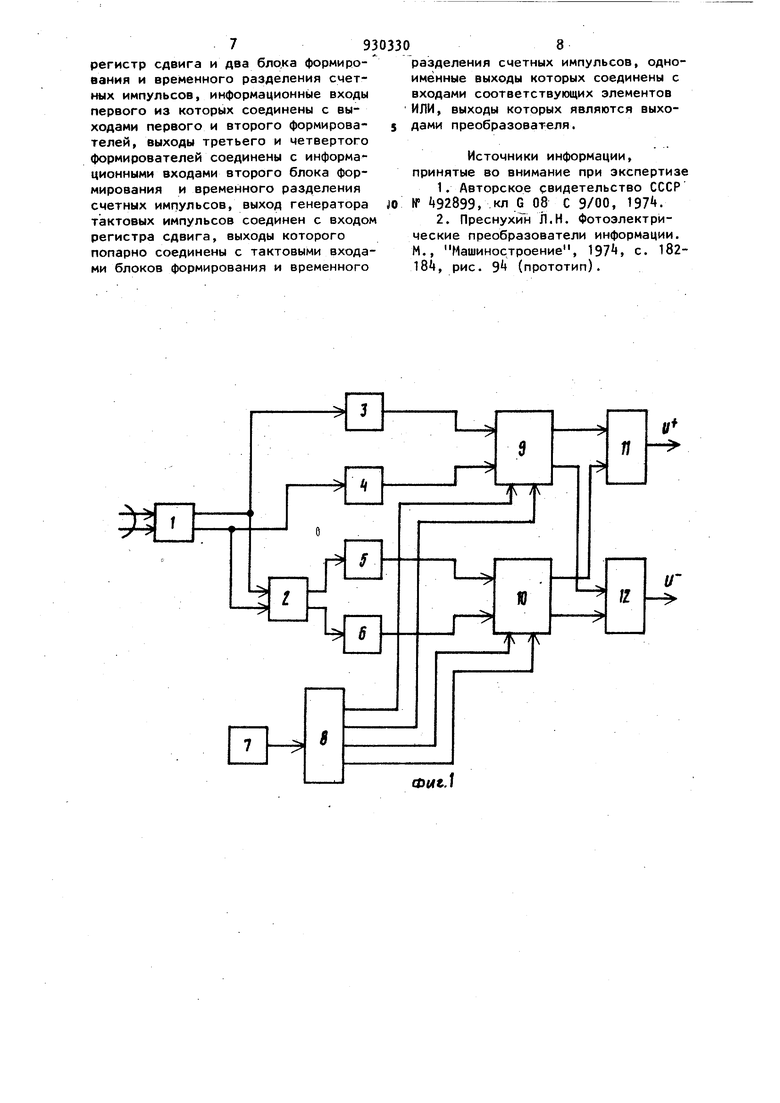
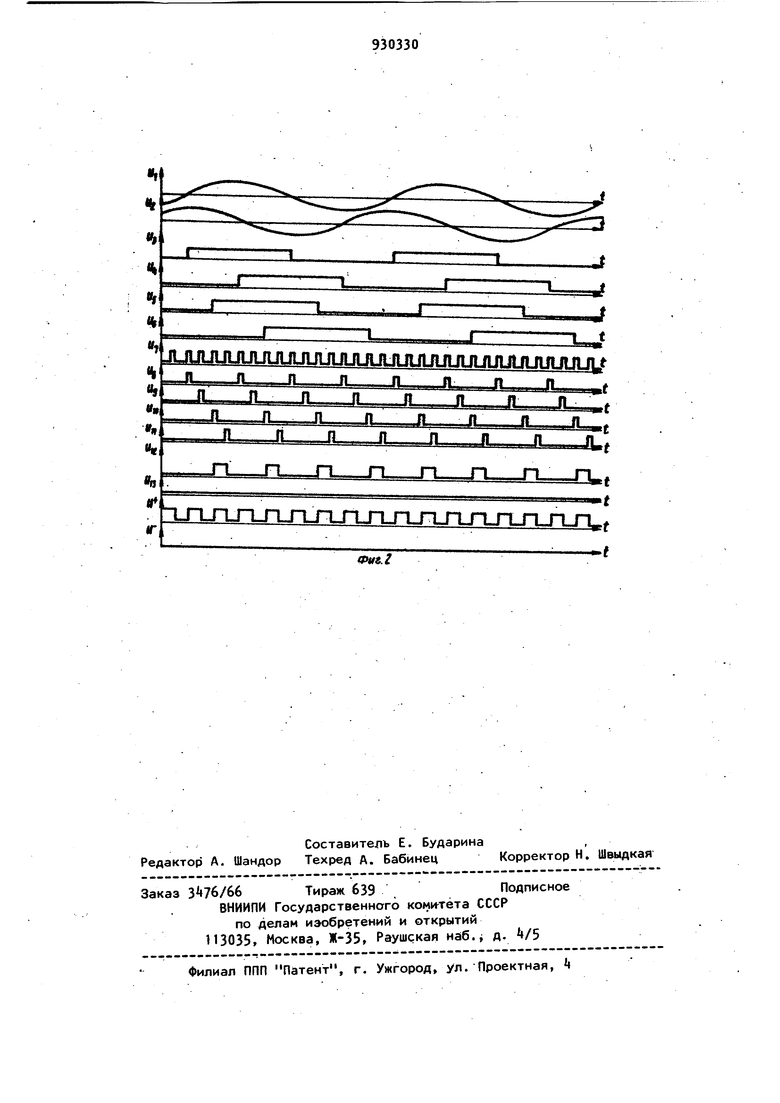
В этом преобразователе повышение разрешающей способности достигается введением суммо-вычитакнцего устройст20ва, включенного между датчиком угла и формирователями, а также увеличением числа формирователей и числа элементов в логическом блоке формирования счетных импульсов. Суммовычитающее устройство осуществляет сравнение прямого сигнала синусного канзла датчика с прямым и инверсным значениями сигнала косинусного кана методом амплитудного преобразования При этом в моменты равенства амплитуд огибающих косинусного и синусного каналом выделяются переходы через О двух дополнительных огиба щиХг Огибающие с выходов датчика и суммо-вычитающего устройства поступает на входы формирователей, форми рующих прямоугольные напряжения. В логическом блоке из ряда прямоуголь ных напряжений формируются счетные импульсы. благодаря увеличению числа импул сов разрешающая способность этого преобразователя повышается Недостатком этого преобразователя является то, что одновременно с повышением разрешающей способности существенно снижается его noMexoJcтойчивость, а следовательно, и точ ность. Цель изобретения - повышение точ ности преобразователя путем повыше ния помехоустойчивости при сохранении его высокой разрешающей с юсобности. Поставленная цель достигается тем, что в преобразователь угла поворота вала в код, содержащий синусно-косинусный датчик угла, выходы ко торого соединены с входами первого и второго формирователей соответственно и входами суммо-вычитающего блока, выходы которого соединены с входами третьего и четвертого формирователей, введены два элемента ИЛИ, генератор тактовых импульсов, регистр сдвига и два блока формирова ния и временного разделения счетных импульсов, информационные входы первого из которых соединены с выходами первого и второго формирователей, выходы третьего и четвертого формирователей соединены с информационными входами второго блока формирова ния и временного разделения счетных импульсов выход генератора тактовых импульсов соединен с входом регистра сдвига, выходы которого попарно соединены с тактовыми входами блоков формирования и временного разделения счетных импульсов, одноименные выходы которых соединены со входами соот 9 4 ветствующих элементов ИЛИ, выходы которых являются выходами преобразователя . Это позволяет разделить многофазную систему сигналов с выходов формирователей на группы сигналов, каж дая из которых обрабатывается отдельной системой тактовых импульсов, что создает возможность временного разделения сигналов с соседних формирователей и правильного формирования счетных импульсов как в нормальных условиях, когда преобразователь работает по методу амплитудного преобразования, так и в критических условиях при уменьшении временных интервалов между огибающими с выходов формирователей вплоть до слияния, когда преобразователь переходит в режим фазового преобразования с последующим объединением одноименных счетных импульсов с бло-1 ,ка формирования и временного разделения счетных импульсов. На фиг. 1 приведена структурная схема преобразователя угла поворота вала в код; на фиг. 2 - диаграмма работы преобразователя. Преобразователь содержит синуснокосинусный датчик 1 угла, суммовычитающий блок 2, формирователи 3-6i генератор 7 тактовых импульсов, регистр 8 сдвига, блоки 9, Ю формирования и временного разделения счетных импульсов, элементы 11, 12 ИЛИ. На диаграмме (фиг. 2) обозначены сигналы И 1, И 2 с выходов синусного и косинусного каналов датчика 1 угла, сигналы ИЗ, И, И5, Ибс выходов формирователей 3-6, сигнал И 7 ci генератора 7 тактов-ых импульсов, сигналы И 8-И 11 с выходов сдвигового регистра 8, сигналы И 12, И 12 с выходов блока 9 формирования и временного разделения счетных импульсов, ригналы И 13 И 13 с выходов блока 10 формирования и временного разделения счетных импульсов, сигнал И, с выхода элемента ИЛИ 11, сигнал И с выхода элемента ИЛИ 12. Работа преобразователя осуществлятся следующим образом. Датчик 1 угла запитывается напряжеием, которое модулируется датчиком 1, результате чего на его выходах ормируются сигналы И 2 и И 1 (фиг.27, (Огибающие) синусоидальной формы, двинутые по фазе друг относительно
друга на 90 эл. град, и имеющие частту вращения ротора датчика 1. Огибающие И 1, И 2 поступают на входы формирователей 3 и одновременно на входы суммо-вычитающего блока 2. С входов последнего снимаютс две .дополнительные огибающие И 1, И 2, имеющие ту же частоту, что и огибающие И 1, И 2 но сдвинутые относительно них на AS эл. град. Сдвиг уежду дополнительными огибающими И i И 2 составляет 90 эл. град . Дополнительные огибающие И 1 и И 2 поступают на входы формирователей 5, 6. По сигналам с выходов датчика 1 и суммовычитающего блока 2 формирователи 3-6 формируют прямоугольныесигналы И 3 - И 6 (фиг. 2). Сигналы , И k сдвинутые между собой на 90 эл. град. I поступают на входы бло,ка 9. а сигналы И 5, И 6 сдвинутые между собой на ту же величину и на S эл. град, относительно сигналов И 3 и - на входы блока 10.
Генератор 7 тактовых импульсов вырабатывает тактовую последовательность импульсов И 2 (фиг. 2) с необходимой частотой следования, которая подается на четырехразрядный кольцевой регистр 8 сдвига, в котором в один из разрядов записана логическая единица. При этом с регистра 8 с каждого из разрядов снимается последовательность импульсов И 8 - И 11 (фиг. 2) с частотой, в четыре раза меньшей входной частоты, и с сдвигом по отношению к предыдущему разряду на один такт последней. Сигналы И 8, И 9 поступают на Тактовые входы блока 9, а сигналы И 10, И 11 на одноименные входы блока 10.
При повышенной разрешающей способности воздействие помехи и динамических перегрузок приводит к резкому сближению интервала между двумя соседними сигналами, например И 3, И 5 (И А, И 6) (фиг. 2), либо даже к их слиянию (совпадению во времени), что может привести к потере счетных импульсов.
Для исключения этого сигналы |1 3 - И 6 с пониженной частотой следования (пониженной дискретностью поступают на блоки 9, 10 в каждом из которых обработка сигналов происходит на раздельных тактовых частотах. Это обеспечивает возмож- ност.ь временного разделения двух соседних огибающих, совпадающих во воемени. При этом с каждого блока 9 О снимаются счетные импульсы И 12, И 12 и И 13Т И 13(фиг. 2) с исключением их потери и уменьшенной дискретностью, которая восстанавливается при последующем об-ьединении счетных импульсов с блоков 9. 10. Потеря импульсов на выходе устройства исключается временным разделением сигналов за счет обработки сигналов в каждом блоке 9« Ю раздельными тактовыми частотами.
Сигналы И 12, И 13 подаются на входы элемента ИЛИ 11 а сигналы И 12, И 13 на входы элемента ИЛИ 12, с выхода которых снимаются сигналы И и И(фиг. 2) с дискретностью, равной 8р.
При этом независимо от направления вращения работают оба блока 9 10. Импульсы соответствующего направления вращения с Каждого блока 9. 10 объединяются на соответствующем элементе ИЛИ 11, 12 для восстановления необходимой дискретности с сохранением пЪмехоустойчивости, обеспечиваемой предыдущими блоками преобразователя.
Таким образом, при воздействии помех и динамических перегрузок, приводящих к критическому сближению двух соседних огибающих, с выходов формирователей преобразователь переходит в фазовый режим, обеспечивая вр менное разделение соседних огибающих и соответственно счетных импульсов, тем самым исключая возможность потери последних и обеспечивая повышение точности преобразователя.
Экономический эффект от использования изобретения обусловлен его тех ническими особенностями,приведенными выше.
Формула изобретения
Преобразователь угла поворота вала в код, содержащий синусно-косинусный датчик угла, выходы которого соединены с входами первого и второго формирователей соответственно и входами суммо-вычитающего блока, выходы которого соединены с входами третьего и четвертого формирователей, отличающийся тем, что, с целью повышения точности преобразователя, в него введены два элемента ИЛИ, генератор тактовых импульсов, 793033 регистр сдвига и два блока формирования и временного разделения счетных импульсов, информационные входы первого из которых соединены с выходами первого и второго формирова- s телей, выходы третьего и четвертого формирователей соединены с информационными входами второго блока формирования и временного разделения сметных импульсов, выход генератора JO тактовых импульсов соединен с входом регистра сдвига, выходы которого попарно соединены с тактовыми входами блоков формирования и временного разделения счетных импульсов, одноимённые выходы которых соединены с входами соответствующих элементов ИЛИ, выходы которых являются выходами преобразователя. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 92899, кл G 08 С 9/00, 197. 2.Преснухйн Л.Н. Фотоэлектрические преобразователи информации. М., Машиностроение, 197, с. 182184, рис. 9 (прототип).
k щ

| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1978 |
|
SU746657A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1101867A1 |
| Преобразователь угла поворотаВАлА B КОд | 1979 |
|
SU830471A1 |
| Преобразователь угла поворота вала в код | 1984 |
|
SU1169167A1 |
| Импульсный преобразователь перемещения | 1981 |
|
SU985808A1 |
| Импульсный преобразователь угла в код | 1980 |
|
SU911582A1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 1981 |
|
SU1840281A1 |
| Преобразователь угла поворота вала в код | 1984 |
|
SU1302430A2 |
| Резервированный преобразователь перемещение-код | 1981 |
|
SU982048A2 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |
лn
nn
fl nfi nnn
n П П rr n n n n
Ha IT
r
JLn
JL
JL
лn
