г1302430-2
Изобретение относится к автомати-формы, сдвинутые по фазе друг относике и вычислительной технике, можеттельно друга на 90 эл.град., но с
быть использовано в системах преоб-частотой в п раз меньшей по сравнению
разования информации и является частотой сигналов с выходов датчивершенствованием устройства по авт.св. ка 1. Сигналы с датчика 2 поступают
№ 746657. на яходы формирователей 8 импульсов.
Целью изобретения является повы-вьфабатывающих сигналы прямоугольной
шение динамической устойчивости пре-формы.
образователя путем расширения диапа- Сигналы с выходов формирователей
зона однозначно определяемого переме- JO7 и 8 импульсов и сигнала старшего
щения.разряда с шифратора 10 поступают на
На чертеже представлена функцио-входы блока 11 согласования.В этом
нальная схема преобразователя углаблоке из сигналов датч ика 2 угла и
поворота вала в код.сигнала старшего разряда кода шифраПреобразователь содержит основной 15тора 10 формируется одноразрядный дво- синусно-косинусный датчик 1 с р-пара-ичньш код путем согласования старше- .ми полюсов, дополнительный синусно-го разряда кода шифратора 10 и сиг- косинусный датчик 2 с р/п-парами по-налов дополнительного датчика -2 (нап- люсов, где п - четное число, суммиру--ример, методом V-кода или в коде .юще-вычитающий блок 3, формирователи 20Грея).
4-9 импульсов, шифратор 10, блок 11 На выходе блока 11 согласования
согласования сигналов основного и до-из совокупности трехразрядного и одполнительного синусно-косинусных дат-норазрядного двоичных кодов формиручиков, регистр 12, блок 13 сравненияется четырехразрядный двоичньм код
и сумматор 14.f i положения вала внутри полюсного
Преобразователь работает следующим о Р
деления датчика 2 с - --парами по- образом.п
Датчик 1 с р-парами полюсов запи-люсов.
тывается постоянным напряжением, ко- Выходной код N блока 11 согласоТорое моделируется датчиком, в ре- 30вания поступает непосредственно на
зультате чего на его выходах, форми-вход блока 13 сравнения и в регистр
руются сигналы синусоидальной формы,12 где запоминается на один такт обсдвинутые по фазе друг относительноработки информации и в виде кода N
друга на 90 эл.град.Эти сигналы с час-поступает на другой вход блока 13
тотой, определяемой угловой скоростью 35сравнения.
вращения ротора датчика 1, поступают В блоке 13 сравнения вырабатываетна входы формирователей 4 и 5 импуль-ся разность N меж,цу текущим N и
сов и входы суммирующе-вычитающегопредьщущим N, кодами: блока 3, с выхода которого снимаются
два дополнительных синусоидальных сиг-40 лН N - N,.(1)
нала, имеющих ту же частоту, что и
выходные сигналы датчика 1, но сдви- Если разность u.N положительна и нутые относительно них на 45 зл.град.меньше восьми (половины десятичного Сдвиг между дополнительными огибаю-значения максимального кода блока 11 щими составляет.90 эл.град. С выходов 45согласования кодов), то fc.N сумми- суммирующе-вычитающего блока 3 допрл-руется с содержанием сумматора 14.Ес- иительные синусоидальные сигналы пос- ли разность &N отрицательна и тупают на входы формирователей 6 и 7. восьми, то разность &N вы- По сигналам с выходов датчика 1 ичитается из содержимого сумматора 14. суммирующе-вьтитающего блока 3 форми- 50 Если AN 0 и 1 & восьми, то рователи 4-7 импульсов вырабатьшаютв блоке 12- сравнения образуется новая сигналы прямоугольной формы, поступа-разность дЫ 16 + ЬН, которая сум- нщие на входы шифратора 10. В послед-мируется с содержимым сумматора 14. нем формируется трехразрядный двоич-Если &N,0 и /uN,/ восьми, то в ный код. 55блоке 13 сравнения образуется раз- Одновременно датчик 2 угла с р/п-ность . 16 - N,, которая вычи- парами полюсов, (где , где k -тается из содержимого сумматора 14. натуральное число) аналогичным обра- Таким образом,, на выходе блока 13 зом.формирует сигналы синусоидальнойсравнения вырабатываются приращение
кода AN и знак приращения signN, которые .поступают на вход сумматора 14. Сумматор 14 вырабатывает сумму приращений N 1лМ и знак sign N этой суммы. Сигналы N и sign N с выходов сумматора 14 являются вых.одными сигналами преобразователя, пропорциональ ными угловому перемещению. Дополнительный датчик (с дополнительными формирователями и блоком согласования) с числом полюсов 180/сОТ, где мгновенная угловая скорость выходной оси датчика, Т - эквивалентный к цикл обработки информации, позволяет расширить диапазон однозначно определяемого перемещения.
Так, например, в момент времени tp - значение кода N. поступает на
13
один вход блока сравнения и в регистр где запоминается на один такт обработки информации и в виде кода N поступает на другой вход блока сравнения. Если за такт обработки произошло искажение информации за счет динамических воздействий (либо помех и код предьщущего значения, записанный в регистр, .изменился в следующий момент времени t , на код N (текущее значение), то в блоке сравнения организуется приращение ,-N (равное и)Т либо величине помехи). Если в следующем такте воздействие прекратилось и код снова стал равным N , то в блоке сравнения организуется при ращение Д N - N с противоположны знаком и равное по абсолютной величине и, .
Следовательно, в сумматоре после их сложения искажения информации исключаются. Если изменение информации не связано с искажением, то указанные изменения в виде приращения фиксируются в сумматоре.
Дпя однозначного определения знака и модуля приращения необходимо, чтобы искажение (изменение) информации ( d) за такт обработки не превосходило половины полюсного деления дополнительного датчика. Отсюда числ
полюсов дополнительного датчика
Очевидно, что в неэкстремальных условиях работы накапливающего преобразователя информация дополнительного
датчика является пассивной и для обес 55 ходу старшего разряда шифратора, а
печения функционирования не является обязательной.
ВНИИПИ Заказ 1225/56
Произв. полигр. пр-тие, г. Ужгород, ул. Проектная, 4
jg
0
25 ЗОФор24304
Таким образом, введение в тракт обработки преобразователя информации с дополнительного датчика Позволяет восстанавливать информацию после воздействия независимо от высокой разрешающей способности преобразователя с использованием датчика с высокой электрической редукцией с учетом степени динамического воздействия и ок- вивалентной частоты обработки информации и тем самым решить задачу снятия имеющихся противоречий в классе накапливающих преобразователей, а также использовать с высокой эффективностью указанное решение в экстремальных условиях.
. Для нормального функционирования преобразователя при динамическом воздействии допускается за эквивалентный цикл обработки информации угол
t5
Фор
поворота &.ot ротора датчика 1, превосходящий в п раз число полюсов этого датчика, т.е.
360°- п
&.Ы „ т- р 2
(2)
Фор
Из формулы (2) следует, что динамическая устойчивость предлагаемого преобразователя возрастает в п раз при сохранении высокой разрешающей способности известного преобразователя.„
мула изобретения
Фор
Преобразователь угла поворота вала в код по авт.св. № 746657, отличающийся тем, что, с целью повышения динамической устойчи- {вости преобразователя, в него введен дополнительный синусно-косинусный датчик с числом пар полюсов р/п, где р - число пар полюсов синусно-коси- нусного датчика, п 2 , где k - натуральное число, два дополнительных формирователя импульсов и блок согласования сигналов синусно-косинусны датчиков, выходы дополнительного си- нусно-косинусного датчика через дополнительные формирователи импульсов
подключены соответственно к первому и второму входам блока согласования сигналов синусно-косинусных датчиков, третий вход которого подключен к вывыход - к дополнительным входам регистра и блока сравнения.
Тираж 902 Подписное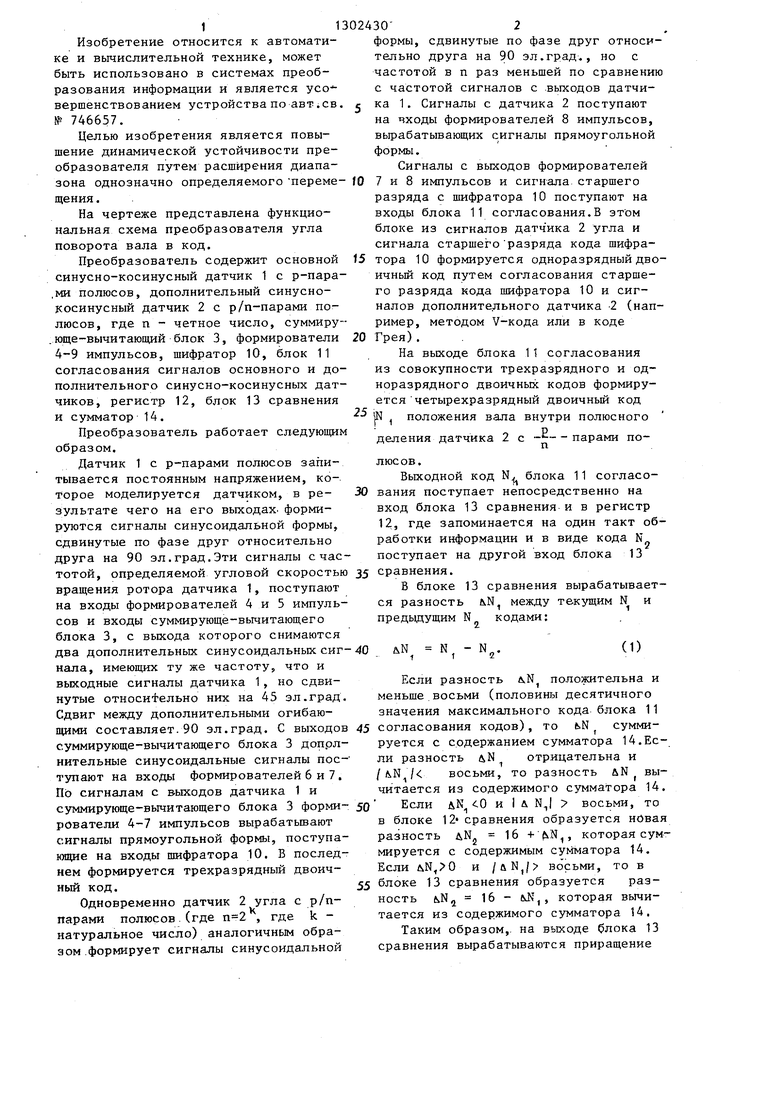
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угла поворота вала в код | 1978 |
|
SU746657A1 |
| Преобразователь угла поворотаВАлА B КОд | 1979 |
|
SU830471A1 |
| Преобразователь угла поворота вала в код | 1983 |
|
SU1101867A1 |
| Импульсный преобразователь угла в код | 1980 |
|
SU911582A1 |
| Преобразователь перемещения в код | 1977 |
|
SU674068A1 |
| Преобразователь угла поворота вала в код | 1980 |
|
SU930330A1 |
| Преобразователь перемещения в число-импульсный код | 1977 |
|
SU674069A1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| Преобразователь угла поворота вала в код | 1986 |
|
SU1320902A1 |
| Преобразователь перемещения в код | 1981 |
|
SU997064A2 |
Изобретение относится к автоматике и вычислительной технике, может быть использовано в системах преобразования информации и является усовершенствованием изобретения по авт.св. № 746657. С целью повышения динамической устойчивости преобразователя по авт.св. № 746657 путем расширения диапазона однозначно определяемого перемещения в него введены дополнительный синусно-косинусньш датчик 2 с числом полюсов р/п, где р - число пар полюсов синусно-косинусного датчика 1, п 2 , где k - натуральное число, два дополнительных формирователя 8,9 импульсов и блок 11 согласования сигналов синусно-косинусных датчиков. Если в процессе измерения возникло возмущение, приводящее к формированию в блоке 13 сравнения приращения б , в последующем цикле измерения в блоке 13 сравнения формируется приращение & с противоположным знаком. Таким образом,вносимое возмущением искажение ликвидируется в последующем цикле измерения. При отсутствии возмущения информация дополнительного датчика 2 не используется для формирования выходного кода. 1 ил. с (Л со о to 4: СО О N)
| Преобразователь угла поворота вала в код | 1978 |
|
SU746657A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
