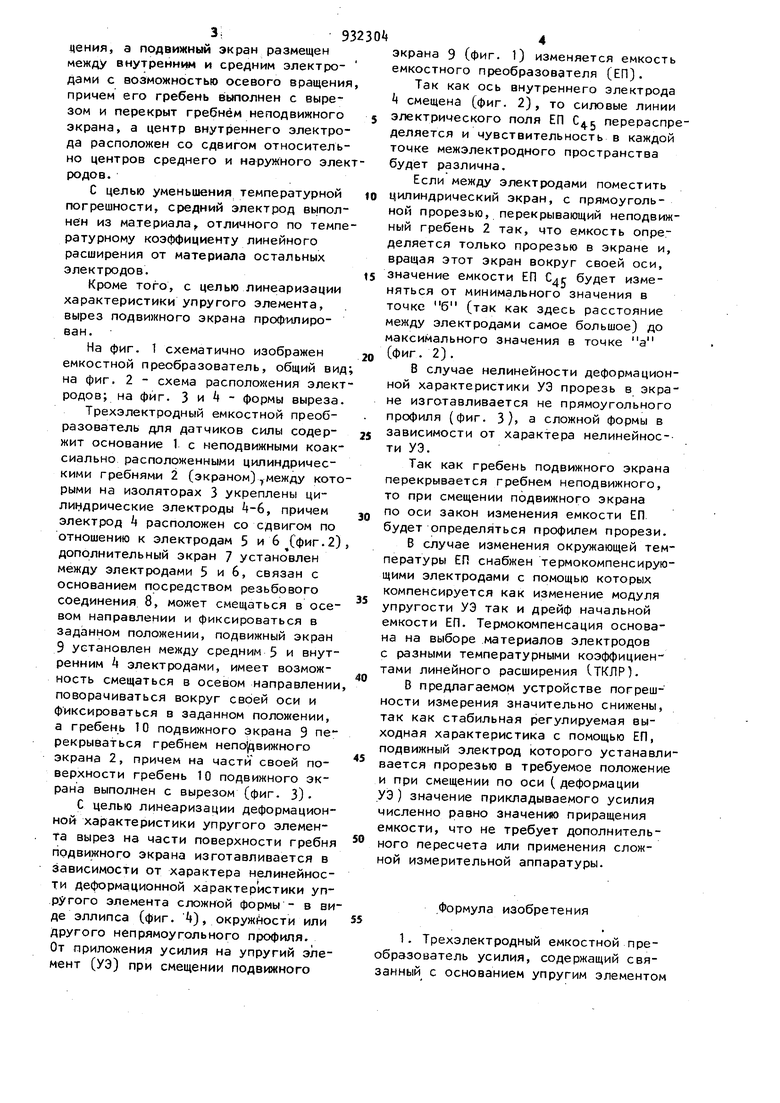
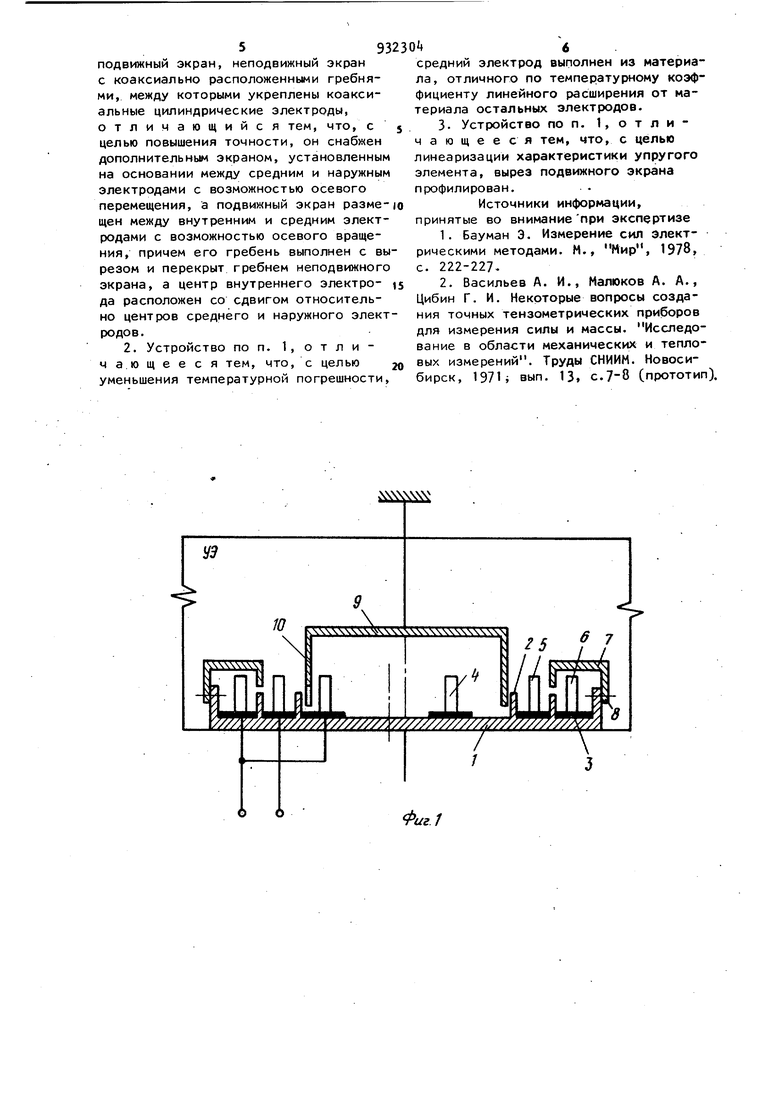
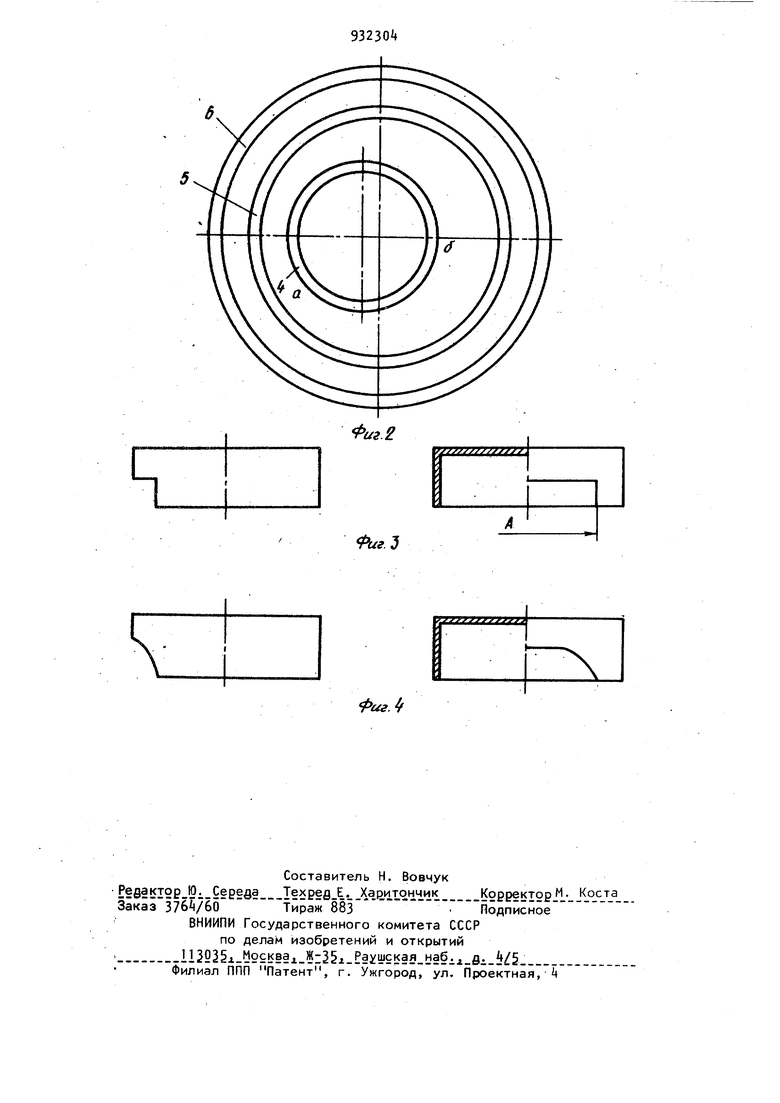
Изобретение относится к измеритель ной технике, преимущественно к весовой технике и может .применяться в устройствах для измерения массы и силы. Известны емкостные преобразователи, применяемые для датчиков силы или массы, .представляющие собой пластины расположенные определенным образом одна относительно другой 1. Наиболее близким к предлагаемому является трехэлектродный емкостной преобразователь. Этот преобразователь содержит цилиндрические коаксиальные электроды с расположенным между ними подвижным экраном. Для обеспечения постоянства исходной градуировки датчика от изменения температуры под экраном емкостного преобразователя установлен биметаллический фланец l. Основными недостатками известного емкостного преобразователя являются: невозможность регулировки чувствитель ности емкостного преобразователя, что требует для получения отсчета в единицах измеряемой величины пересчитывать измеренное прибором значение емкости через коэффициент в соответствующее значение измеренной силы или массы, что значительно снижает экономический эффект, невозможность линеаризации деформационной характеристики упругого элемента, что требует введения дополнительных поправок в результате измерения, и кроме того установленный биметаллический фланец находится на поверхности силоприемной части, в которой возникают большие напряжения и деформации, что приводит к невоспроизводимости показаний. Цель изобретения - повышение точности. Указанная цель достигается тем, что устройство снабжено дополнительным экраном, установленным на осно1вании между средним и наружным электродами с возможностью осевого переме3|93дения, а подвижный экран размещен между внутренним и средним электродами с возможностью осевого вращения причем его гребень выполнен с вырезом и перекрыт гребнём неподвижного экрана, а центр внутреннего электрода расположен со сдвигом относительно центров среднего и наружного элек родов. С целью уменьшения температурной погрешности, средний электрод выполнен из материала отличного по темпе ратурному коэффициенту линейного расширения от материала остальных электродов. Кроме того, с целью линеаризации характеристики упругого элемента, вырез подвижного экрана профилирован. На фиг. 1 схематично изображен емкостной преобразователь, общий вид на фиг. 2 - схема расположения элект родов; на фиг. 3 и 4 - формы выреза. Трехэлектродный емкостной преобразователь для датчиков силы содержит основание 1 с неподвижными коаксиально расположенными цилиндрическими гребнями 2 (экраном),между кото рыми на изоляторах 3 укреплены цилиндрические электроды -6, причем электрод Ц расположен со сдвигом по отношению к электродам 5 и 6 (фиг.2) дополнительный экран 7 установлен между электродами 5 и 6, связан с основанием посредством резьбового соединения 8, может смещаться в осевом направлении и фиксироваться в заданном положении, подвижный экран 9 установлен между средним 5 и внутренним электродами, имеет возможность смещаться в осевом направлении поворачиваться вокруг своей оси и фиксироваться в заданном положении, а гребень 10 подвижного экрана 9 перекрываться гребнем непо|цвижного экрана 2, причем на части своей поверхности гребень 10 подвижного экрана выполнен с вырезом (фиг. 3) С целью линеаризации деформационной характеристики упругого элемента вырез на части поверхности гребня подвижного экрана изготавливается в зависимости от характера нелинейности деформационной характеристики упругого элемента сложной формы - в ви де эллипса (фиг. ), окруж14ости или другого непрямоугольного профиля. От приложения усилия на упругий элемент (УЭ) при смещении подвижного экрана Э (фиг. 1) изменяется емкость емкостного преобразователя (ЕП). Так как ось внутреннего электрода смещена (фиг. 2), то силовые линии электрического поля ЕП 0.5 перераспределяется и чувствительность в каждой точке межэлектродного пространства будет различна. Если между электродами поместить цилиндрический экран, с прямоугольной прорезью, перекрывающий неподвижный гребень 2 так, что емкость определяется только прорезью в экране и, вращая этот экран вокруг своей оси, значение емкости ЕП будет изменяться от минимального значения в точке б (так как здесь расстояние между электродами самое большое) до максимального значения в точке а (фиг. 2). В случае нелинейности деформационной характеристики УЭ прорезь в экране изготавливается не прямоугольного профиля (фиг. 3 } а сложной формы в зависимости от характера нелинейное-ти УЭ. Так как гребень подвижного экрана перекрывается гребнем неподвижного, то при смещении подвижного экрана по оси закон изменения емкости ЕП. будет определяться профилем прорези. В случае изменения окружающей температуры ЕП снабжен термокомпенсирующими электродами с помощью которых компенсируется как изменение модуля упругости УЭ так и дрейф начальной емкости ЕП. Термокомпенсация основана на выборе материалов электродов с разными температурными коэффициентами линейного расширения (ТКЛР). В предлагаемом устройстве погрешности измерения значительно снижены, так как стабильная регулируемая выходная характеристика с помощью ЕП, подвижный электрод которого устанавливается прорезью в требуемое положение и при смещении по оси ( деформации УЭ ) значение прикладываемого усилия численно равно значению приращения емкости, что не требует дополнительного пересчета или применения сложной измерительной аппаратуры. .Формула изобретения 1. Трехэлектродный емкостной преобразователь усилия, содержащий связанный с основанием упругим элементом
подвижный экран, неподвижный экран с коаксиально расположенными гребнями, между которыми укреплены коаксиальные цилиндрические электроды, отличающийся тем, что, с 5 целью повышения точности, он снабжен дополнительньм экраном, установленным на основании между средним и наружным электродами с возможностью осевого перемещения, а подвижный экран разме-|о щен между внутренним и средним электродами с возможностью осевого вращения, причем его гребень выполнен с вырезом и перекрыт гребнем неподвижного экрана, а центр внутреннего электро- 5 да расположен со сдвигом относительно центров среднего и наружного электродов.
2. Устройство по п. 1, о т л и ча.ющееся тем, что, с целью 20 уменьшения температурной погрешности.
средний электрод выполнен из материала, отличного по температурному коэффициенту линейного расширения от материала остальных электродов.
3. Устройство по п, 1, о т п и чающееся тем, что, с целью линеаризации характеристики упругого элемента, вырез подвижного экрана профилирован.
Источники информации, принятые во вниманиепри экспертизе
1.Бауман Э. Измерение сил Электрическими методами. М., Мир, 1978, с. 222-2272.Васильев А. И., Малюков А. А., Цибин Г. И. Некоторые вопросы создания точных тензометрических приборов для измерения силы и массы. Исследование в области механических и тепловых измерений. Труды СНИИМ. Новосибирск, 1971 i вып. 13, с.7-8 (прототип
| название | год | авторы | номер документа |
|---|---|---|---|
| ЕМКОСТНЫЙ ДАТЧИК ВЕСА | 1990 |
|
RU2027157C1 |
| Емкостной преобразователь усилия | 1984 |
|
SU1176186A1 |
| ЕМКОСТНЫЙ ДАТЧИК СИЛЫ | 1992 |
|
RU2065588C1 |
| Зуб землеройной машины | 1988 |
|
SU1677192A1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ ЕМКОСТНОГО АКСЕЛЕРОМЕТРА | 1996 |
|
RU2098832C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ НАЛИЧИЯ И/ИЛИ ХАРАКТЕРИСТИК ОБЪЕКТА ИЛИ ЕГО СОСТАВЛЯЮЩИХ, ПРЕИМУЩЕСТВЕННО ДЛЯ ОБЪЕКТОВ СЕЛЬСКОХОЗЯЙСТВЕННОГО НАЗНАЧЕНИЯ | 1994 |
|
RU2066521C1 |
| Емкостный преобразователь деформации | 1980 |
|
SU851129A1 |
| Преобразователь перемещения в частоту | 1985 |
|
SU1317283A1 |
| Воздушный дифференциальный конденсатор переменной емкости | 1961 |
|
SU143930A1 |
| Устройство для измерения радиального зазора | 1986 |
|
SU1355862A1 |
.-5
MM6ibMfd 2 2
