I
Предлагаемое изобретение ртносится к измерительной технике и может быть использовано в системах регистрации параметров механического воздействия, например в сейсмометрии.
Известны устройства для регистрации механических воздействий, в частности датчик динамических перемещений, который включает диффузиоа|1ЫЙ преобразователь с мембранами, снабженный дополнительными герметичными камерами, соединенными между собой капиллярным отверстием, одна из камер, у которой стенка выполнена нвиде жесткой мембраны, заполнена жидкостью (касторовым маслом). Жесткая мембрана механически связана со штоком переме1даемого объекча Г J.
Недостатком данного дагчнка является ограниченн1,ц1 частотный диапазон и невысокая чувствительность, обусловленные наличием ;кесткой мембраны.
Наиболее близким по техническсйй сущности к предлагаемому является датчик механических воздействий, содержащий диффузионный преобразователь, выполненньй в виде заполненного электролитом корпуса, ограниченного с торцовых сторон мембранами и содержащего перегородку с измерительным каналом, делящую объем корпуса на две полости. Наличие инерщюнной массы, связанной с мембранами преобразователя и подвешенной на пружинном подвесе позволяет повысить чувствительность 12}.
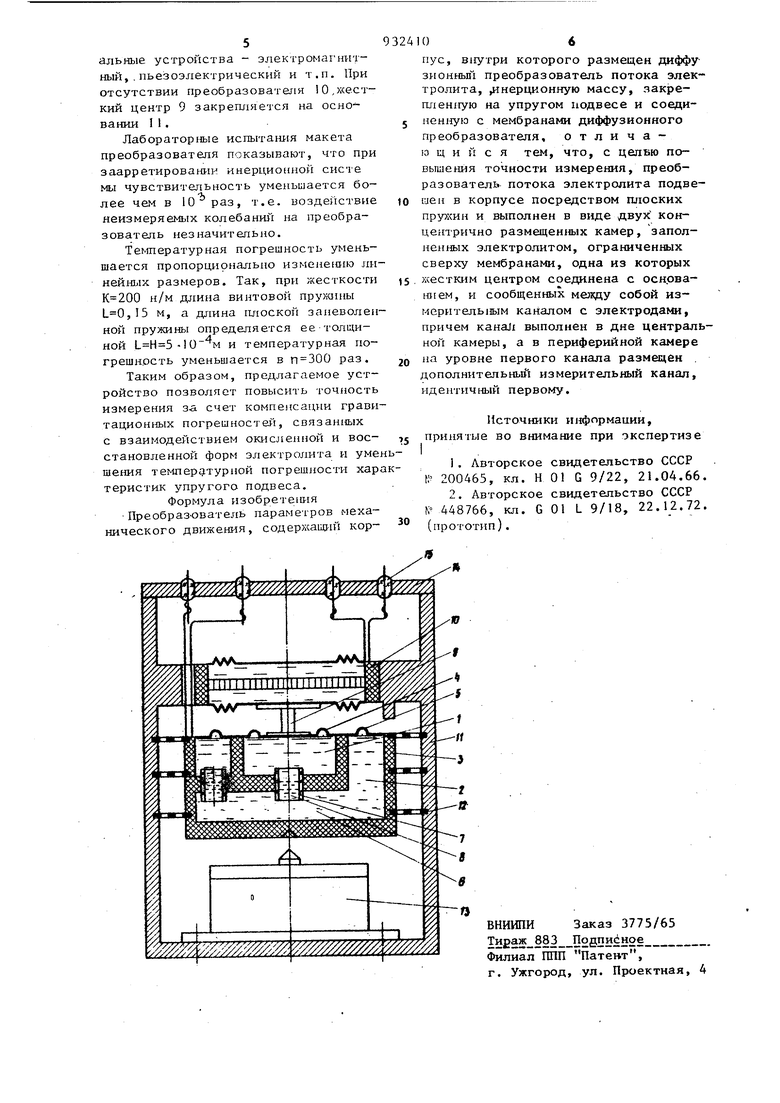
Однако наличие пружинного подвеса увеличивает габариты прибора и уменьшает точность измерения вследствие температурных и усталостных изменений параметров подвеса. Кроме того, вертикальное расположение камер преобразователя с одним измерительным каналом приводит к дополнительным погрешностям, определяемом собственными колебаниями свободной 393 поверхности мембран и неизмеряемым потоком электроактивного компонента под действием гравитационных сши Цель, изобретения - повышение точности измерения. Указанная цель достигается тем, что npeo6pa3OBaTejib потока электролита подвешен в корпусе посредством плоских пружин и выполнен в виде двух концентрично расположенных камер, заполненных электролитом, ограниченных сверху, мембранами, одна из которых жестким центром соединена с основанием, и сообщенных между собой измерительным каналом с электродами, причем канал выЛолнен в дне центральной камеры, а в периферийной камере на уровне первого канала размещен дополнительньш измерительный канал, идентичный первому. Выполнение измерительных каналов с электродами в каждой из камер, рас положенных концентрически) уменьшает погрешность измерения за счет взаимной компенсации сигнала, возникающего в измерительном канале под воздействием потока электроактивного ко понента, вызванного силами гравитации. Установка диффузионного преобразователя на плоских пластинах, кор пус которого в этом случае служит инерционной массой, уменьшает абсолютные температурные изменения харак теристик подвеса, что связано с умен .шением линейной величины упругого подвеса. Кроме того, совмещение инер ционной массы с корпусом диффузионного преобразователя уменьшает габариты и вес прибора. На чертезке приведено предлагаемое устройство. Прибор содержит диффузионный преобразовате пь, состоящий из центральной камеры 1 и эксцентрично по отношению к ней расположенной кольце вой камеры 2, образованных корпусом 3 и ограниченных сверху центральной мембраной 4 и кольцевой мембраной 5, Которые конструктивно могут -быть выполнены единой деталью. Камеры диффузионного преобразователя заполHBjai электролитом бив каждой из них выполнен измерительный канал 7 с электродами 8. Центральная мембрана 4 имеет жесткий центр 9, соединен ный через преобразователь 10 электрического сигнала в механический, с основанием прибора 11. Корпус диффузионного преобразователя 3 выполняет роль инерционной массы и закреплен с помощью кольцевых пластин 12 на цилиндрической поверхности корпуса прибора 11, в нижней части которого установлен арретир 13, закрепляющий инерционную массу, а в верхней части предусмотрена крышка 14 с токовыводами от элементов устройства 15. Преобразователь работает следую1цим образом. При наличии внешнего механического воздействия (смещения, скорости, ускорения), воспринимаемого основанием прибора 11, корпус диффузионного преобразователя 3, выполняющий роль инерционной массы смещается от положения равновесия, а так как центральная мембрана 4 с помощью жесткого центра 9, происходит ее перемещение относительно корпуса диффузионного преобразователя 3 и электролит перетекает, а на электродах 8 измерительных каналов (при включении их в электрическую цепь считывания) появляется Электрический сигнал, пропорциональный мехажческому воздействию. При этом поток активного реагента в измерительных каналах под воздействием измеряемого сигнала имеет противоположное направление и при соответствующем соединении электродов выходной сигнал суммируется. Поток же под их воздействием гравитационных сил имеет одинаковое направление (сверху вниз) и данный неизмеряемый параметр при этом же включении электродов компенсируется. При отсутствии внешнего воздействия, но при подаче на преобразователь 10 калибровочного электрического сигнала, на его выходе, получаем механический сигнал, воздействующий через жесткий центр 9 так же, как и при измерении сигнала, на мембрану 4. При соединении электродов диффузионного преобразователя 8 через функциональный усилитель электрической схемы считывания с преобразователем Ю-осуществляется дополнительное одновременное с измеряемым сигналом механическое воздействие, изменяющее поток электролита через измерительный канал. Таким образом, преобразователь 7 слухшт для Внутренней калибровки и коррекции выходных характеристик прибора и может иметь различные пришшни
| название | год | авторы | номер документа |
|---|---|---|---|
| Молекулярно-электронный датчик механи-чЕСКиХ СигНАлОВ | 1979 |
|
SU843003A1 |
| Диффузионный датчик механических сигналов | 1979 |
|
SU1125667A1 |
| Датчик механических сигналов | 1982 |
|
SU1027785A1 |
| Устройство для измерения параметров механических колебаний | 1976 |
|
SU746291A1 |
| Датчик параметров колебательного движения | 1977 |
|
SU632912A1 |
| Диффузионный датчик механических сигналов | 1979 |
|
SU775765A1 |
| Измерительный электрод для диффузионных преобразователей | 1979 |
|
SU930125A1 |
| Датчик параметров механического движения | 1977 |
|
SU632913A1 |
| ДАТЧИК ПАРАМЕТРОВ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 1997 |
|
RU2152044C1 |
| Способ регистрации механических сигналов | 1974 |
|
SU518659A1 |
