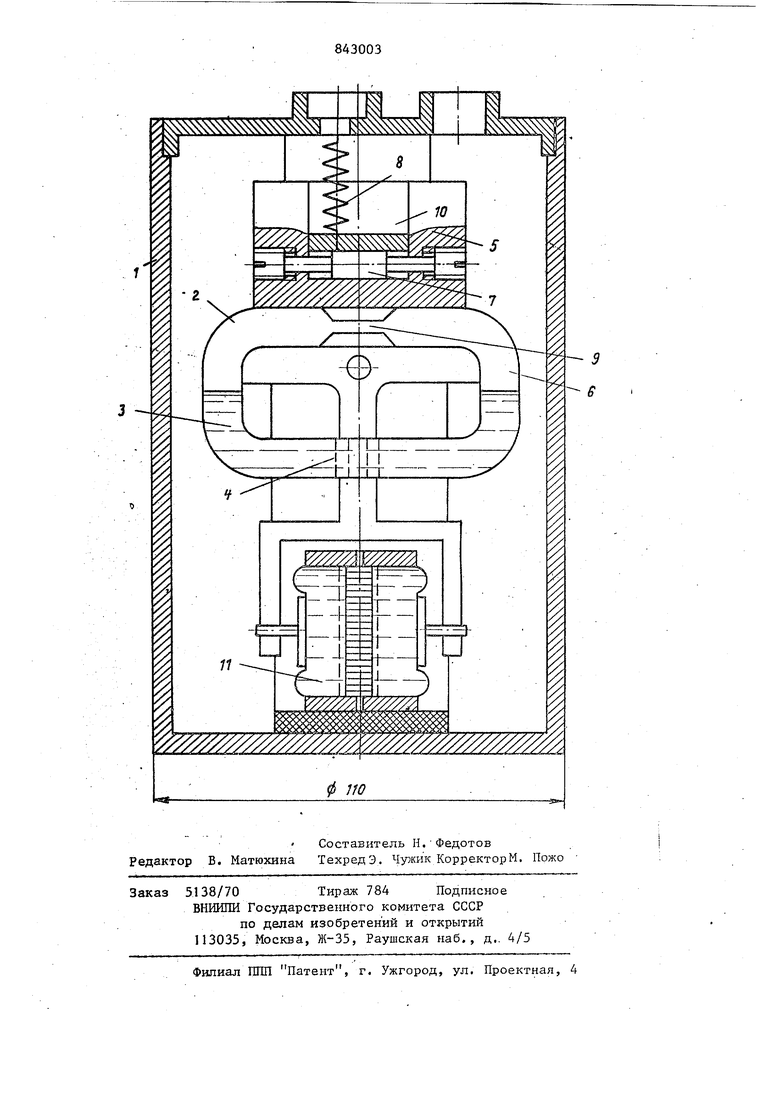
. 1 - Изобретение относится к измерительной технике и может быть исполь зЪвано для регистрации механических воз-действий, например смещений почвы, ускорений и т.п. Известны молекулярно-электронные устройства для регистрации механичес ких воздействий, основанные на элект рокинетичес ом или диффузионном прин ципах. Известен электрохимический преобразователь механических воздейСтвий, содержащий корпус, внутренний объем которого заполнен электролитом и разделен перегородкЪй на два отсека, в каждомиз которых размещен анод И катод, расположенный в кацале перегородки, два чувствител ных элемента, герметично закрепленны на торцах корпуса,источник постоянного напряжения, подключенный к аноду и катоду через резистор, параллельно которому включен электроизмерительный прибор, последовательно с которым включены дополнительный резистор и диод l}. Недостатком известного устройства является невысокая чувствительность. Наиболее близким по технической сущности к предлагаемому является датчик механич.еских воздействий, содержащий диффузионный преобразователь, выполненный в виде запол. йенного электролитом корпуса,ограниченного с торцовых сторон мембранами и содержащего перегородку с каналом, делящую корпус на две полости с электродом.в каждой из них. Датчик содержит также инерционную массу,подвешенщгю .на упругом подвесе и связанную с мембраной преобразователя Г23. Недостатком данного датчика является ограниченная чувствительность., связанная с изменением со временем характеристики мембранного преобразователя. Кроме того, наличие мембран увеличивает общую жесткость упругоi системы, что также приводит к сниже нию чувствительности датчика. Цель изобретения - повьшение чув ствительности. Указанная цель достигается тем, что в датчике механических сигналов диффузионный преобразователь выполнен в виде вертикально ориенти рованного замкнутого контура, части но заполненного злектролитом, а ине ционная масса установлена на шарнир причем ось вращения инерционной массы смещена относительно ее центр тяжести в плоскости контура диффузи ного преобразователя. Так как центр тяжести инерционно массы не совпадает с осью ее вращения, то при наличии механического в действия происходит поворот на шарн ре инерционной массы. В связи с жес КИМ креплением инерционной массы с преобразователем происходит также поворот подледнего, а вьшрлнение .преобразователя в виде контура и наличие воздушных объемов приводит к разности уровней электролит-а, что создает противодействующий . повороту период давления, а это, в свою очарЪдь, приводит к повышению чувствительности датчика по причине уменьшения сопротивленияперетоку электролита из одной камеры в другую, определяемому в известных устройствах наличием мембран и увеличением расход а электролита V ДН- 5ц Чбрез канал преобразователя сечения 3j , которая определяется не только величиной инерционной массы М, но и расстоянием д6 центра тяжести от оси вращения I q де Ггде дН - измене юе .уровней электролита;L - длина контура преобразоваК -.местность подвеса; а - действуК1Щее ускорение. На чертеже схематически представ лена конструкция предлагаемого молекулярно-электроинного датчика механических сигналов. . Молекулярно-электронньй датчик содержит кожух 1, внутри которого помещен диффузионный преобразовател 2, выполненный в виде йменядего вид контура полого корпуса, заполненного частично электролитам 3 и ориентированного в вертикальной плоскости. В нижней части корпуса установлен преобразующий элемент 4, содержащий анод и катод, образзпощие совместно с электролитом обратимую окислительно-восстановительную систему. Воздушные камеры корпуса 6 сообщаются капиллярным каналом 9, корпус преобразователя 2 жестко соединен с инерционной массой 5, подвешенной с помощью регулировочного устройства 7 на упругом подвесе &, к кожуху 1 и установленной на струнном шарнире 10. Крепление упругого подвеса может быть осуществлено на любом расстоянии г- центра тяжести инерционной массы 5. Точка крепления инерционной массы 5 к упругому подвесу 8 и ось вращения инерционной массы 5 смещенЬ по разные стороны от центра тяжести инерционной массы 5 в плоскости контура преобразователя 2. Инерционная масса 5 соединена с мембранами электроосмотического преобразователя 11 электрического сигнала в механический, выполняющего роль демпфирующего устройства, калибратора и при соответствующем включении в схе му считьюания элемента обратной связи. Датчик работает следующим образом. При наличии внешнего механического воздействия (смешения, скорости, ускорения), направленного вертикально, инерционная масса 5, смещаясь на упругом подвесе относительно кожуха 1, проворачиватеся на шарнире в связи с тем, что центр тяжести инерци онной массы не совпадает с Осью вращения. Вместе с инерционной массой поворачивается и жестко связантш с ней диффузионный преобразователь 2. При этом изменяются уровни элек-г тролита в камерах преобразователя и создается перепад давления, определяемый разностью этих уровней. Электролит 3 перетекает через канал преобразующего элемент.а 4 и на электродах его появляется электрический сигнал, пропорциональный входному механическому воздействию, Таким образом, выходной электрический сигнал на преобразующем элементе образуется как за счет инерционных сил, действующих на массу электролита и получаемьЬс от поворота контура преобразователя.
так и за счет разности уровней электролита в камерах преобразователя.
При размерах Предлагаемого датчика 1,,, и одинаковых значе шях остальных параметров (м,К, а) получают увеличение расхода электролита, а следовательно, и чувствителньости в ...
.bE. -eib-.«-iO
раъ.
применение предлалагемого датчика позволяет расширить динамический диапазон измерения механических сигнал; лов малого уровня.
Формула изобретения
Молекулярно- электронный датчик механических сигналов, содержащий размещенные в корпусе калибратор.
диффузионный преобразователь и инерционную массу, подвешенную на упругом подвесе и жестко соеднненн5 то с диффузионным преобразователем о т л ич;ающийся тем, что, с целью повышения чувствительности датчика, диффузионный преобразователь выполнен виде .замкнутого контура, . частично заполненного электролитом,
а инерцио1шая масса установлена на щарнире, причем центр тяжести инерционной массы смещен относительно ее центра вращения в плоскости контура диффузионного преобразователя.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельств СССР
8 353289, кл. Н 01 G 9/22, 25.11.70.
2.Авторское свидетельство СССР I 448766, кл. G 01 ,L 9/18, Й2.12.72
(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь параметров механического движения | 1979 |
|
SU932410A1 |
| Устройство для измерения параметров механических колебаний | 1976 |
|
SU746291A1 |
| МОЛЕКУЛЯРНО-ЭЛЕКТРОННЫЙ ДАТЧИК УГЛОВЫХ ДВИЖЕНИЙ | 2011 |
|
RU2454674C1 |
| Диффузионный датчик механических сигналов | 1979 |
|
SU775765A1 |
| Датчик параметров колебательного движения | 1977 |
|
SU632912A1 |
| Диффузионный датчик механических сигналов | 1979 |
|
SU1125667A1 |
| Датчик параметров механического движения | 1977 |
|
SU632913A1 |
| МОЛЕКУЛЯРНО-ЭЛЕКТРОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ДВИЖЕНИЙ | 2005 |
|
RU2324946C2 |
| МОЛЕКУЛЯРНО-ЭЛЕКТРОННЫЙ ГИДРОФОН С КОМПЕНСАЦИЕЙ СТАТИЧЕСКОГО ДАВЛЕНИЯ | 2019 |
|
RU2724296C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГРАВИТАЦИОННОГО И ВОЛНОВОГО ПОЛЕЙ | 2003 |
|
RU2260199C2 |