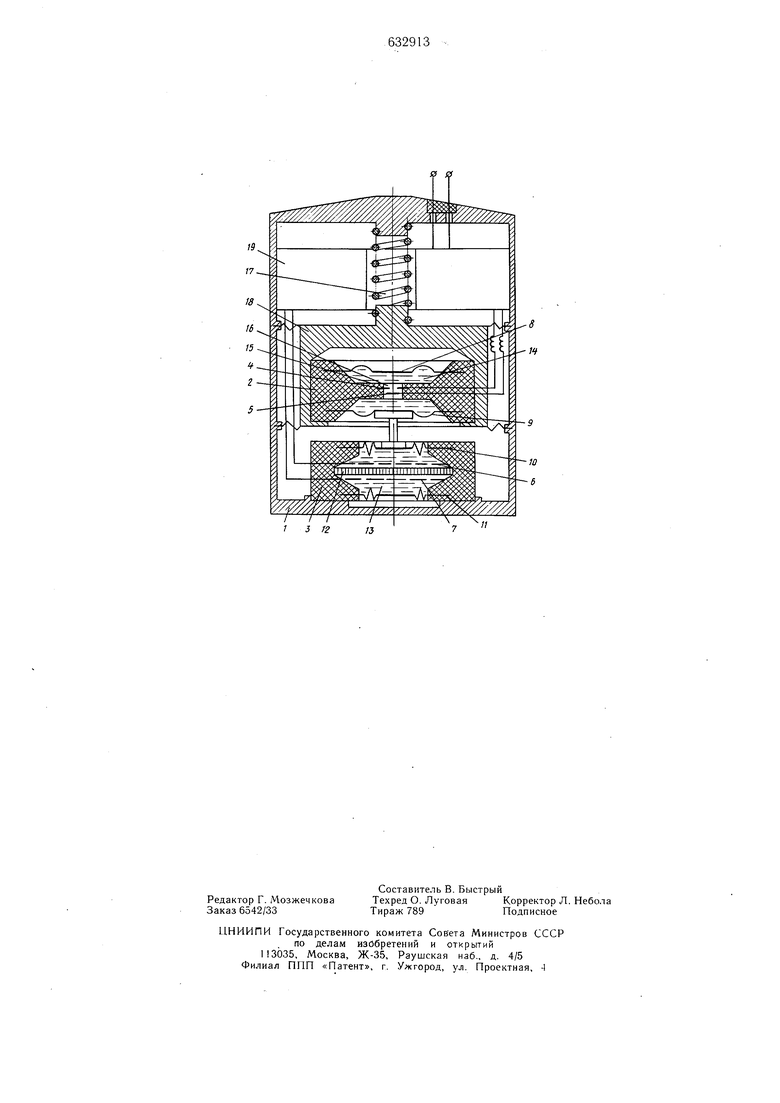
но него диффузионный преобразователь и жестко связанный с корпусом электроосмотический преобразователь, камеры 2, 3 с размещенными в них электродами 4, 5 и 6,7 соответственно. Каждая камера ограничена с торцовых сторон мембранами 8, 9 и 10, 11. Камера 3 электроосмотического преобразователя разделена пористой перегородкой 12 и заполнена полярной жидкостью 13. Камера 2 диффузионного преобразователя заполнена электролито.м 14, в перегородке 15 которой выполнен канал 16 и расположены электроды 4, 5, образующие совместно с электролитом 14 окислительно-восстановительную систему. Датчик также содержит упруго соединенную с корпусом 1 ..посредством пружины 17 инерционную массу 18, жестко связанную с камерой 2 диффузионного преобразователя. По крайней мере одна из мембран диффузионного преобразователя (например, мембрана 9) жестко соединена с мембраной 10 электроосмотического преобразователя.
Датчик снабжен электронным блоком 19 усиления и преобразования, посредством которого соединены электроды электроосмотического и диффузионного преобразователей.
При механических колебаниях объекта, на котором устанавливается датчик, предназначенный для измерения параметров этих колебании, происходят перемещения инерционной массы 18 относительно корпуса 1, а вместе с ней и камеры 2 диффузионного преобразователя. Так как мембраны 8, 9 в этот момент остаются неподвижными, происходит переток электролита 14 через канал 16, и на электродах 4, 5 преобразователя, к которым подается питание, за счет реакции окисления-восстановления появляется электрический сигнал. Этот сигнал поступает в электронный блок 19 и после соответствующего усиления и преобразования поступает на электроды 6, 7 электроосмотического преобразователя. При этом под действием сил электроосмоса полярная жидкость 13 перетекает через пористую перегородку 12, вследствие чего мембраны 10, 11 электроосмотического преобразователя, перемещаясь, воздействуют на мембрану 9 диффузионного преобразователя, и поток электролита 14 через канал 16 диффузионного преобразователя увеличивается, т. е. увеличивается его объемный расход. Это в свою очередь повыщает величину коэффициента преобразователя и выходной ток преобразователя, т. е. чувствительность устройства.
Повыщение чувствительности устройства достигается с помощью применения инерционной массы 18 (0,5-1 кг), в качестве которой используется камера 2 диффузионного преобразователя, и электроосмотического преобразователя, осуществляющего дополнительный поток электролита 14 через диффузионный преобразователь. При этом включение электродов 4-7 преобразователей осуществляется таким образом, что потоки складываются (положительное соединение) .
В случае противоположного соединения электродов 4-7 поток электролита 14, обусловленный действием электроосмотического
преобразователя, имеет встречное направление по отнощению к потоку, вызванному воздействием инерционных сил, и уменьщает его, что приводит к уменьщению смещения инерционной массы 18. Такое электрическое соединение преобразователей позволяет расщирить динамический диапазон измерения параметров, заключающийся в возможности регистрации больших величин параметров колебательного движения.
Формула изобретения
Датчик параметров механического движения, содержащий установленные в корпусе диффузионный и электроосмотический
преобразователи, камеры которых с размещенными в них электродами ограничены с торцовых сторон мембранами, и упруго соединенную с корпусом инерционную массу, жестко связанную с диффузионным преобра зователем, отличающийся тем, что, с целью
повышения чувствительности и расширения динамического диапазона измерения параметров, он - снабжен электронным блоком усиления и преобразования, посредством которого соединены электроды электроосмотического и диффузионного преобразователей, по крайней мере, одна из мембран последнего жестко соединена с мембраной электроосмотического преобразователя, а инерционная масса соединена с камерой диф фузионного преобразователя, установленного в корпусе с возможностью перемещения относительно него.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР № 448766, кл. G 01 L 9/18, 1972.
2.Патент США № 3296466, кл. 310-2, 1967.

| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик параметров колебательного движения | 1977 |
|
SU632912A1 |
| Устройство для измерения параметров механических колебаний | 1976 |
|
SU746291A1 |
| Молекулярно-электронный датчик механи-чЕСКиХ СигНАлОВ | 1979 |
|
SU843003A1 |
| Датчик механических сигналов | 1982 |
|
SU1027785A1 |
| Преобразователь параметров механического движения | 1979 |
|
SU932410A1 |
| ДАТЧИК ПАРАМЕТРОВ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 1997 |
|
RU2152044C1 |
| МОЛЕКУЛЯРНО-ЭЛЕКТРОННЫЙ ГИДРОФОН С КОМПЕНСАЦИЕЙ СТАТИЧЕСКОГО ДАВЛЕНИЯ | 2019 |
|
RU2724296C1 |
| Молекулярно-электронный гидрофон с обратной связью на основе магнитогидродинамического эффекта | 2018 |
|
RU2698527C1 |
| ДАТЧИК ЛИНЕЙНЫХ УСКОРЕНИЙ | 1992 |
|
RU2066863C1 |
| Электрохимический датчик механических сигналов | 1976 |
|
SU581519A1 |