Изобретение предназначено для получения электроэнергии посредством магнитогидродинамического (МГД) метода преобразования энергии, оно относится к системе экстремального управления мощностью многонагрузочного МГД-генератора и может быть использовано в установках с МГД-генераторами.
Известна система экстремального управления многонагрузочного МГД-генератора, включающая управляемые инверторные мосты, входы которых соединены с электродами генератора, выходы через силовой трансформатор соединены с промышленной сетью, а первичная обмотка трансформатора соединена также и с измерительным преобразователем мощности в импульс, выход которого через блок определения разности двух ближайших импульсов и блок задания дискретных поисковых приращений угла зажигания инвертора соединен с входами управления инверторных мостов.
Известная система экстремального управления не учитывает изменения внутренних параметров по длине канала генератора. Кроме этого, существует возможность появления уравнительных токов в средней части канала, что снижает точность регулирования и надежность работы системы.
Наиболее близкой к предлагаемой по технической сущности является система экстремального управления многонагрузочного МГД-генератора, содержащая последовательно соединенные управляемые инверторные мосты и датчики тока, причем первые входы инверторных мостов и первые входы датчиков тока соединены с соответствующими входами МГД-генератора и первыми и вторыми входами соответствующих датчиков напряжения, выходы которых соединены с входами соответствующих первых полосовых фильтров и первых фильтров низкой частоты, а выходы первых полосовых фильтров через соответствующие блоки деления переменных составляющих соединены с первыми входами соответствующих блоков умножения, а выходы датчиков тока через вторые полосовые фильтры соединены с вторыми входами блоков деления переменных составляющих, а через вторые фильтры низкой частоты с вторыми входами соответствующих блоков умножения, причем вторые входы инверторных мостов соединены с выходами соответствующих первых сумматоров через соответствующие исполнительные элементы, первые входы которых соединены с выходами вторых фильтров низкой частоты, а вторые входы - с выходами блоков умножения.
Для пояснения принципа работы прототипа воспользуемся уравнениями вольт-амперных характеристик МГД-генератора, которые имеют следующий вид (число нагрузок выбрано равным 3):
 , (1) где U1, U2, U3 - напряжения между электродами генератора;
, (1) где U1, U2, U3 - напряжения между электродами генератора;
E1, E2, E3 - ЭДС генератора;
R1, R2, R3 - внутренние сопротивления генератора;
I1, I2, I3 - токи инверторных мостов генератора.
Характеристика суммарной мощности генератора описывается следующим выражением:
P = E1I1 + E2I2 + E3I3 - R1I12 - R2I22 - R3I32.
Оптимальному режиму P = Pмакс соответствует следующее условие:
Iопт=  =
=  =
=  , (2) т. е. оптимальные значения тока нагрузки равны. Это обусловлено спецификой нагружения канала МГД-генератора, а подключение средних электpодов к нагрузке обеспечивает равномерное распределение потенциалов электродов по длине канала генератора.
, (2) т. е. оптимальные значения тока нагрузки равны. Это обусловлено спецификой нагружения канала МГД-генератора, а подключение средних электpодов к нагрузке обеспечивает равномерное распределение потенциалов электродов по длине канала генератора.
Известная система экстремального управления из-за неточного измерения сопротивлений генератора (сигналы на выходе блоков деления переменных составляющих) R1 = R1 ±Δ R1; R2 = R2 ±Δ R2; R3 = R3 ±Δ R3имеет ошибку определения оптимальных токов, т. е. I1опт ≠ I2опт ≠ I3опт. Это уменьшает точность регулирования, так как P1 ≠ Pмакс.
Целью изобретения является повышение точности регулирования.
Поставленная цель достигается тем, что в известную систему экстремального управления многонагрузочного МГД-генератора введены второй и третий сумматоры и блок деления, причем выходы соответствующих блоков умножения и первых фильтров низкой частоты соединены с соответствующими входами второго сумматора, а выходы блоков деления переменных составляющих - с соответствующими входами третьего сумматора, выходы второго и третьего сумматоров соединены с соответствующими входами блока деления, выход которого соединен с первыми входами первых сумматоров, вторые входы которых соединены с выходами соответствующих вторых фильтров низкой частоты.
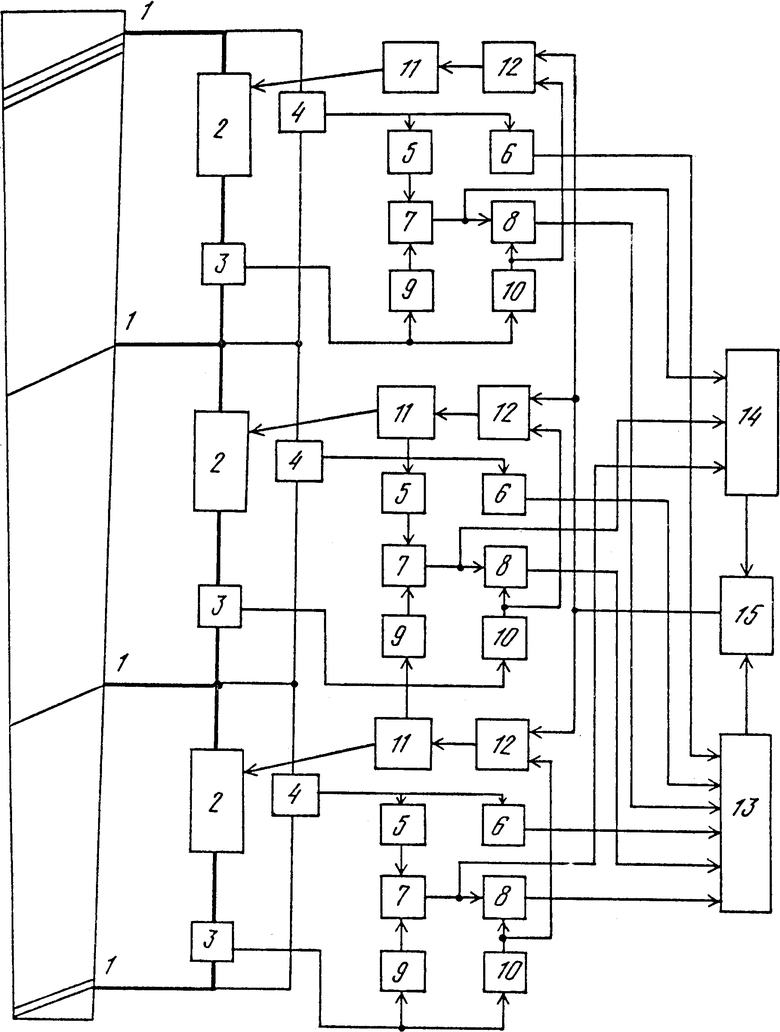
На чертеже приведена функциональная схема системы экстремального управления, в которую входят электроды МГД-генератора 1, инвеpторные мосты 2, датчики 3 тока, датчики 4 напряжения, первые полосовые фильтры 5, первые фильтры 6 низкой частоты, блоки деления переменных составляющих, блоки 8 умножения, вторые полосовые фильтры 9, вторые фильтры 10 низкой частоты, исполнительные элементы 11, первые сумматоры 12, второй сумматор 13, третий сумматор 14 и блок 15 деления.
Система экстремального управления работает следующим образом. Сигналы с первых полосовых фильтров 5 и вторых полосовых фильтров 9 поступают на входы блоков 7 деления переменных составляющих, на выходе которых будут сигналы, равные R1 = R1 ±Δ R1; R2 = R2 ±Δ R2; R3 = R3±Δ R3, т. е. содержат точное значение внутреннего сопротивления R1, R2, R3 и погрешность Δ R1, Δ R2, Δ R3. Далее на выходах блоков 8 умножения будут сигналы, равные произведению сигналов с выходов блоков 7 деления переменных составляющих и вторых фильтров 10 низкой частоты, т. е. R1I1; R2I2; R3I3. На выходе второго сумматора 13 сигнал равен сумме сигналов с выходов блоков 8 умножения и первых фильтров 6 низкой частоты, т. е. R1I1 + R2I 2+ + R3I3 + U1 + U2 + U3 = E Σ. На выходе третьего сумматора 14 сигнал равен сумме сигналов с выходов блоков 7 деления переменных составляющих, т. е. R1 + R2 + R3± ±Δ R1 ±Δ R2 ±Δ R3= R Σ. При этом погрешности противоположных знаков взаимно уничтожаются. Далее на выходе блока 15 деления будет сигнал, равный EΣ/2RΣ= IоптΣ. Сигналы с выхода блока 15 деления и выходов вторых фильтров низкой частоты поступают на входы первых сумматоров 12, которые через исполнительные элементы 11 устанавливают экстремальный режим работы МГД-генератора.
Предлагаемая система экстремального управления обладает техническим и экономическим эффектом по сравнению с прототипом. Технический эффект выражается в том, что одновременное изменение токов в инверторах МГД-генератора исключает возможность длительного уравнительного тока в средней части канала, что повышает надежность работы системы, так как при этом сохраняется равномерное распределение потенциала по длине канала генератора, а измерение параметров генератора по секциям канала МГД-генератора дает возможность частично скомпенсировать погрешности противоположных знаков, и это повышает точность регулирования по мощности на 1-2% по сравнению с точностью базового объекта (3-5% ).
Экономический эффект оценивается с учетом повышения точности регулирования, так как при этом увеличивается мощность, выдаваемая МГД-генератором в промышленную сеть.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ ИЗМЕРИТЕЛЬНОГО КАНАЛА | 1992 |
|
RU2010295C1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1987 |
|
SU1521242A1 |
| ПАНОРАМНЫЙ ПРИЕМНИК | 1991 |
|
RU2010244C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПРОГНОЗА СОСТОЯНИЯ И ОТБРАКОВКИ РАДИОЭЛЕКТРОННОЙ АППАРАТУРЫ | 1991 |
|
RU2010321C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ОПОРНОГО НАПРЯЖЕНИЯ | 1991 |
|
RU2010441C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ПЕРЕКРЕСТНЫХ ИСКАЖЕНИЙ В СИСТЕМАХ ПЕРЕДАЧИ ИНФОРМАЦИИ С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 1991 |
|
RU2010322C1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1517737A1 |
| УСТРОЙСТВО КОМПЕНСАЦИИ РАДИОПОМЕХ | 1992 |
|
RU2010259C1 |
| УСТРОЙСТВО ДЛЯ ИЗЛУЧЕНИЯ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ | 1992 |
|
RU2010457C1 |
| УСТРОЙСТВО ДЛЯ ПРИЕМА ШИРОКОПОЛОСНЫХ СИГНАЛОВ С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 1992 |
|
RU2010443C1 |
СИСТЕМА ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ МНОГОНАГРУЗОЧНОГО МАГНИТОГИДРОДИНАМИЧЕСКОГО ГЕНЕРАТОРА , содеpжащая последовательно соединенные упpавляемые инвеpтоpные мосты и датчики тока, пpичем пеpвые входы инвеpтоpных мостов и пеpвые входы датчиков тока соединены с соответствующими входами МГД-генеpатоpа и пеpвыми и втоpыми входами соответствующих датчиков напpяжения, выходы котоpых соединены с входами соответствующих пеpвых полосовых фильтpов и пеpвых фильтpов низкой частоты, а выходы пеpвых полосовых фильтpов чеpез соответствующие блоки деления пеpеменных составляющих соединены с пеpвыми входами соответствующих блоков умножения, выходы датчиков тока чеpез втоpые полосовые фильтpы соединены с втоpыми входами блоков деления пеpеменных составляющих, а чеpез втоpые фильтpы низкой частоты с втоpыми входами соответствующих блоков умножения, пpичем втоpые входы инвеpтоpных мостов соединены с выходами соответствующих пеpвых сумматоpов чеpез соответствующие исполнительные элементы, отличающаяся тем, что, с целью повышения точности pегулиpования системы, она содеpжит втоpой и тpетий сумматоpы и блок деления, пpичем выходы соответствующих блоков умножения и пеpвых фильтpов низкой частоты соединены с соответствующими входами втоpого сумматоpа, а выходы блоков деления пеpеменных составляющих - с соответствующими входами тpетьего сумматоpа, выходы втоpого и тpетьего сумматоpов соединены с соответствующими входами блока деления, выход котоpого соединен с пеpвыми входами пеpвых сумматоpов, втоpые входы котоpых соединены с выходами соответствующих втоpых фильтpов низкой частоты.
