Изобретение относится к автоматике и контрольно-измерительной технике, в частности, может быть использовано для компенсации погрешностей, вносимых каналом передачи измерительной информации.
Известно устройство, содержащее генератор образцового синусоидального сигнала, который является датчиком нарушения целостности измерительных цепей, нагрузочная обмотка которого включена в общую цепь последовательно с опрашиваемым датчиком через коммутирующее устройство. Контроль целостности цепей измерительных датчиков основан на анализе искажения тест-сигнала постоянного тока высокого уровня, что вызывает нежелательные переходные процессы в измерительных цепях датчиков и линиях связи, которые приводят к погрешностям в результатах измерения. Поэтому проверочные операции с использованием названного тест-сигнала не могут осуществляться одновременно с процессом измерения и требуют дополнительного времени, обусловленного наличием переходных процессов.
Наиболее близким к изобретению, выбранным в качестве прототипа, является устройство для компенсации погрешностей измерительного канала, содержащее датчик измеряемой величины, первый и второй сумматоры, первый генератор образцового сигнала, первый и второй фильтры, первый блок вычисления среднего значения, блок деления, блок умножения, первый блок вычисления, первый блок формирования сигнала задания, блок инвертирования, второй генератор образцового сигнала, третий фильтр и второй блок вычисления среднего значения, второй, третий, четвертый и пятый блоки вычитания, второй блок формирования сигнала задания и третий сумматор, причем выход датчика измеряемой величины подключен к входу первого слагаемого первого сумматора, вход второго слагаемого которого подсоединен к выходу генератора образцового сигнала, подключенного выходом к входу измерительного канала, выход последнего соединен с выходами первого и второго фильтров, выход первого фильтра подключен к входу первого слагаемого второго сумматора, а выход второго фильтра - к входу первого блока вычисления среднего значения, выход которого подключен к входу уменьшаемого первого блока вычитания, вход вычитаемого которого соединен с выходом первого блока формирования сигнала задания, выход блока инвертирования соединен с входом второго слагаемого второго сумматора, выход блока деления соединен с первым входом блока умножения, выход третьего сумматора подключен к входу блока инвертирования, выход второго генератора образцового сигнала подключен к входу третьего слагаемого первого сумматора, выход измерительного канала соединен с входом третьего фильтра, выход которого подключен к входу второго блока вычисления среднего значения, выходом подключенного к входу вычитаемого второго блока вычитания и к выходам уменьшаемого третьего и четвертого блоков вычитания, выход первого фильтра подключен к входу уменьшаемого второго блока вычитания, а его выход - к входу делимого блока деления, выход первого блока вычисления среднего значения подключен к входу вычитаемого третьего блока вычитания, выход которого соединен с входом делителя блока деления, выход второго блока формирования сигнала соединен с входом вычитаемого четвертого блока вычитания, выход которого соединен с входом вычитаемого пятого блока вычитания и входом первого слагаемого третьего сумматора, выход первого блока вычитания соединен с входом уменьшаемого пятого блока вычитания, выходом связанного с вторым входом блока умножения, выход которого соединен с входом слагаемого третьего сумматора.
Недостатком прототипа является то, что компенсации подлежат только те погрешности, которые обусловлены изменениями функции преобразования измерительного канала при сохранении ее линейности. Вместе с тем существуют такие возмущающие и дестабилизирующие факторы, которые приводят к нелинейной функции преобразования измерительного канала. В этом случае точность компенсации погрешностей измерительного канала с использованием прототипа будет низкой.
Целью изобретения является повышение точности компенсации погрешностей измерительного канала.
Сравнительный анализ с пpототипом показывает, что заявляемое устройство отличается наличием двух новых блоков: блока калибровочных сигналов и блока калибровочных напряжений и их связями с остальными блоками устройства. Таким образом, заявляемое устройство соответcтвует критерию изобретения "новизна".
Введение в предлагаемое устройство вышеназванных дополнительных блоков и связей приводит к новому техническому свойству, которое проявляется в способ- ности компенсировать погрешности, обусловленные нелинейностью функции преобразования измерительного канала. В итоге можно гарантировать более высокую по сравнению с прототипом точность компенсации погрешностей измерительного канала. Это позволяет сделать вывод о соответствии заявляемого технического решения критерию "существенные отличия".
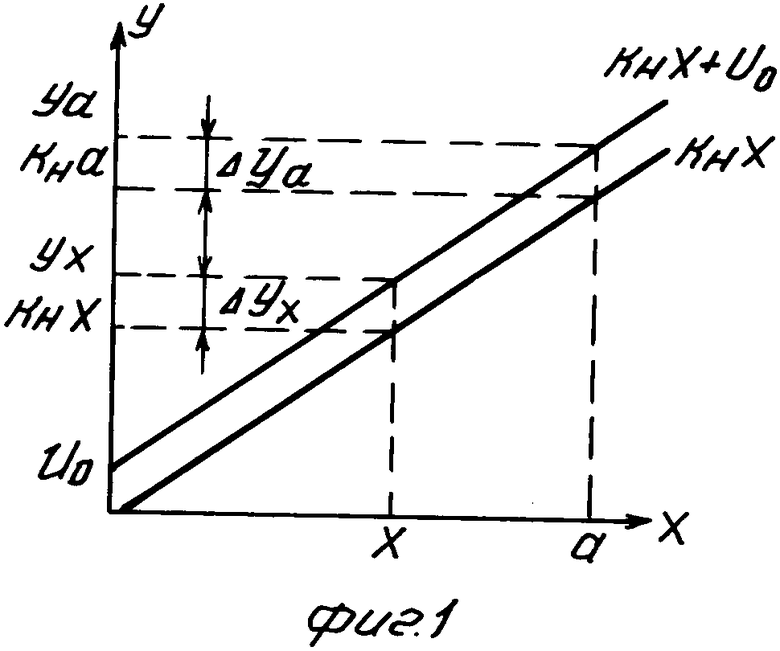
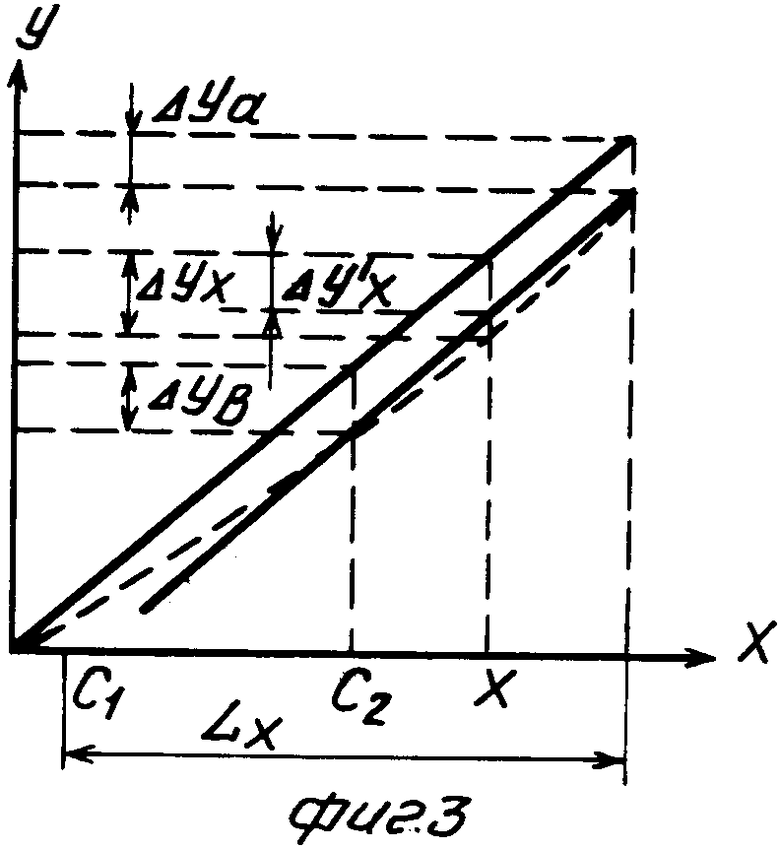
На фиг. 1 и 3 приведены линейная и нелинейная функции преобразования измерительных каналов, погрешности которых компенсируются соответственно с помощью прототипа и предлагаемого устройства; на фиг. 2 - структурная схема предлагаемого устройства для компенсации погрешностей измерительного канала; на фиг. 4 - пример выполнения управляемого формирователя гармонических сигналов калибровочных амплитуд и формирователя сигналов калибровочных напряжений.
Устройство для компенсации погрешностей измерительного канала (фиг. 2) содержит датчик 1 измеряемой величины, управляемый формирователь 2 гармонических сигналов калибровочных амплитуд, первый 3, второй 4 и третий 5 сумматоры, измерительный канал 6, первый 7, второй 8 и третий 9 фильтры, второй 10, первый 11, третий 12, пятый 13 и четвертый 14 блоки вычитания, блок 15 вычисления среднего значения, задатчик 16 напряжений, формирователь 17 сигналов калибровочных напряжений, блок 18 деления, блок 19 умножения, инвертор 20.
Устройство работает следующим образом.
Сигнал Х с выхода датчика 1 измеряемой величины поступает через первый сумматор 3 в измерительный канал 6. С целью компенсации возникающей в измерительном канале 6 погрешности Δ ух (фиг. 3) используются два калибровочных гармонических сигнала с амплитудами а и b, формируемых управляемым формирователем 2 гармонических сигналов калибровочных амплитуд и поступающих также через сумматор 3 в измерительный канал 6. Данные каналы имеют частоты выше частоты передаваемого сигнала Х, на ниже граничной частоты измерительного канала 6. Главной особенностью формирования калибровочных сигналов является то, что их амплитуды а и b задаются из сетки калибровочных уровней напряжения Ci, Ci - Ci-1 = = Δ C = const, i = 1, N, где N - число калибровочных уровней напряжения. Формирователь 2 на основе анализа величины Х осуществляет выбор таких двух уровней Ci и Ci-1, Ci-1 < Ci, для которых выполняется условие Ci-1 < X ≅ Ci, при этом а = Сi, b = Ci-1. С выхода измерительного канала 6 сигнал поступает на входы первого 7, третьего 9 и второго 8 фильтров. Полосы пропускания фильтров 8 и 9 определяются соответственно частотами калибровочных сигналов b и а. Первый фильтр 7 представляет собой широкополостный фильтр, полосы пропускания которого ограничены частотами калибровочных сигналов. Из-за действия на измерительный канал различных возмущающих и дестабилизирующих факторов его реальная функция преобразования ух = f(x) отличается от номинальной КнХ, представляя в общем случае нелинейную зависимость. Численно данное отличие при конкретном значении Х характеризуется погрешностью Δ yx = yx - KнХ (фиг. 3). При этом компенсация погрешности измерительного канала заключается в определении значения КнХ по известному значению ух и найденному в процессе компенсации значению погрешности Δ yx, КнХ = = ух - Δ ух. Для определения погрешности Δух в предлагаемом устройстве заложена линейная интерполяция нелинейной функции преобразования ух = f(x) на интервале (b, a) возможных значений х, b < x ≅ a, a = Ci, b = Ci-1. В этом случае компенсируется погрешность ΔyxI, ΔyxI≈Δyx. Выделенную по- грешность Δ уxI в силу линейного приближения функции преобразования на интервале (b, a) находят по формуле
Δy =
=  · (Δya - Δyb) + Δyb , где ух, уа, уb - напряжения на выходе соответственно первого 7, третьего 9 и второго 8 фильтров;
· (Δya - Δyb) + Δyb , где ух, уа, уb - напряжения на выходе соответственно первого 7, третьего 9 и второго 8 фильтров;
Δ уа - искажение амплитуды калибровочного сигнала а при передаче через измерительный канал, Δ уа = уа - Кна;
Δ уb - искажение амплитуды калибровочного сигнала b, Δ уb = yb- Kнb.
Напряжения yx и уb с выходов фильтров 7 и 8 поступают на входы блока 11 вычитания, на выходе которого имеет место напряжение ух - уb. На входы блока 10 вычитания поступают напряжения уа и уb с выходов фильтров 9 и 8. Соответственно на выходе блока 10 имеет место напряжение уа - уb. С выходов блоков 11 и 10 напряжения подаются на соответствующие входы блока 18 деления, на выходе которого появляется напряжение (ух - уb)/(уа - yb). Для формирования напряжений, равных величинам Δ уа, Δуbискажения амплитуд калибровочных сигналов а и b в измерительном канале, используется блок 15 вычисления среднего значения, формирователь 17 cигналов калибровочных напряжений и блоки 12, 13 вычитаний. На входы блока 15 подаются напряжения уа и уb с выходов фильтров 9 и 8. На выходе блока 15 будет напряжение (уа + уb)/2. Блок 15 вычисления среднего значения может быть реализован с помощью последовательно соединенных сумматора и делителя напряжения на два. Формирователь сигналов калибровочных напряжений на основе анализа величины напряжения (уа + уb)/2, подаваемого с блока 15, выбирает из напряжений КнСi, j = 1, N, действующих на выходах задатчика 16 напряжений такие два напряжения КнСjи KнСj-1, для которых выполняется условие
KнCj-1< ≅ KнCj .
≅ KнCj .
Для обеспечения точной компенсации погрешностей измерительного канала должны выполняться равенства Cj-1 = b, Cj = a. Это возможно только тогда, когда степень нелинейности функции преобразования измерительного канала в пределах шкалы Lx измерения измеряемой величины Х такова, что для всех знаний j, имеющихся от 1 до N, выполняются условия
KнCj-1< <KнCj, где уj = f(Cj).
<KнCj, где уj = f(Cj).
На входы блоков 12 и 13 соответственно подаются напряжения уb, Kнb и уа, Кна, а на выходе имеют место напряжения Δ уb = (yb - Kнb) и Δ ya = (ya - Kна), которые поступают на входы блока 14 вычитания. На выходе блока 14 будет напряжение Δ уа - Δ уb, которое подается на второй на второй вход блока 19 умножения, на его первый вход подается напряжение (ух - уb)/(ya - yb) с выхода блока 18 деления. На выходе перемножителя будет напряжение
[(yx - yb)/(ya - yb)] (Δ ya - Δ yb).
С помощью сумматора 5 получается напряжение ΔyxI = [(yx - yb)/(ya - yb)] (Δ ya - Δ yb) + Δ yb. На выходе инвертора 20 напряжение Δ yxI меняет знак на противоположный. Полученное таким образом напряжение ΔyxI складывается с напряжением ух и в результате на выходе сумматора 5 получается напряжение ух - Δ уxI = Кнх.
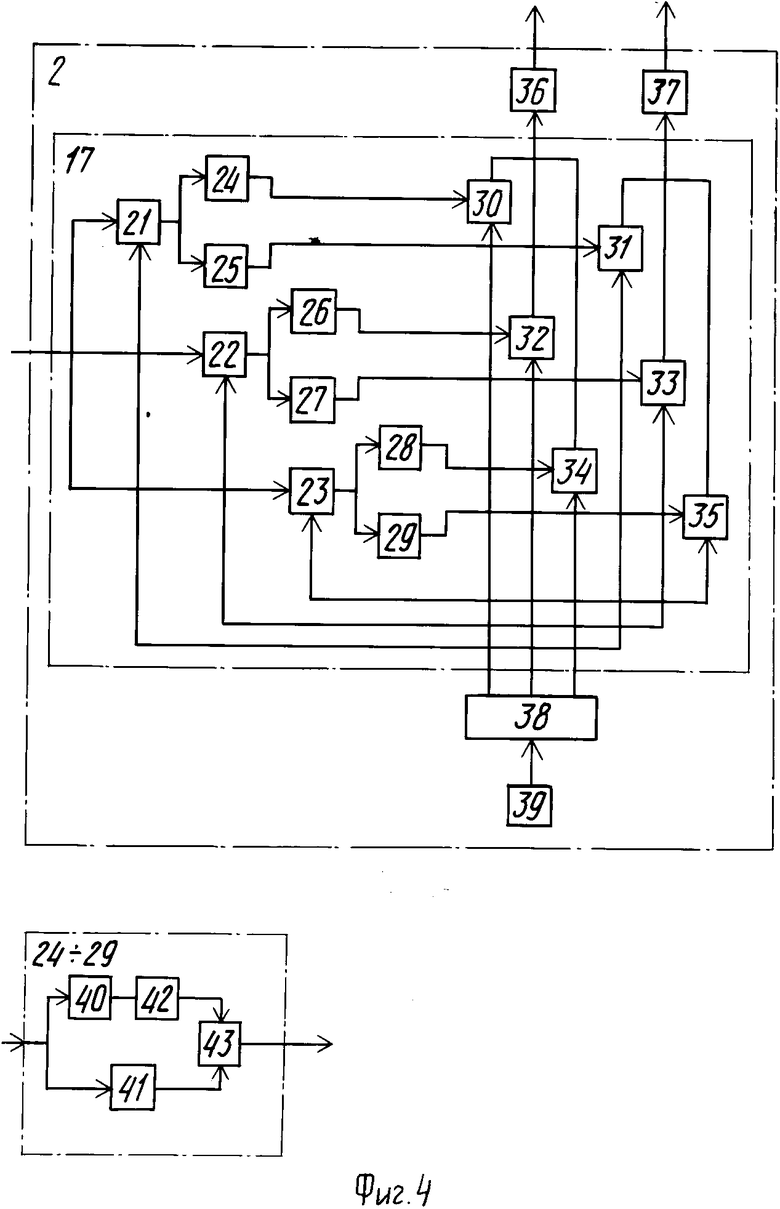
На фиг. 4 для случая трех уровней калибровочных напряжений (N = 3) показан пример выполнения управляющего формирователя 2 гармонических сигналов калибровочных амплитуд и формирователь 17 сигналов калибровочных напряжений. Формирователь 2 состоит из последовательно соединенных генератора 39 образцового напряжения, делителя 38 напряжения, формирователя 17 калибровочных напряжений, к выходам которого подключены два генератора 36 и 37 синусоидальных сигналов, управляемых по амплитуде. Формирователь 17 сигналов калибровочных напряжений состоит их трех блоков 21-23 вычитания двухуровневых компараторов 24-29 и шести ключей 30-35.
В исходном состоянии генератор 39 образцового напряжения вырабатывает стабилизированное постоянное напряжение, которое поступает на делитель 38 напряжения. Делитель, например, резисторный, формирует сетку Ci, i = 1,3 эталонных напряжений, из которых формирователь 17 сигналов калибровочных напряжений формирует калибровочные напряжения а и b. Происходит это следующим образом.
Пусть с выходов делителя 38 эталонное напряжение C1 поступает на блок 21 вычитания, напряжение С2 - на блок 22 вычитания, а С3 - на блок 23 вычитания. Разностные сигналы х - Сi с выходов блоков вычитания подаются на входы двухуровневых компараторов. Причем компараторы 24, 26 и 28 настроены на диапазон О - Δ С, а компараторы 25, 27 и 29 настроены на диапазон - Δ С - О, Δ С = Сi - Ci-1. Двухуровневый компаратор может быть реализован двумя способами. В первом способе двухуровневый компаpатор (фиг. 5) содержит два одноуровневых компаратора 40, 41, инвертор 42, схему И 43. Реализация диапазона О - Δ С компараторов 24, 26, 28 осуществляется следующим образом.
Компаратор 41 настроен на уровень "0", а компаратор 40 - на уровень + Δ С. В исходном состоянии, когда сигнал на входе двухуровневого компаратора отсутствует (х = 0, на входах напряжения вычитателей: -C1 или -С2, или -С3), на выходах компараторов 40, 41 имеет место нулевое напряжение, одно из них с выхода компаратора 41 приложено к первому входу схемы И, а другое через инвертор 42 в виде высокого уровня "1" -к второму входу схемы И. С выхода схемы И снимается низкое нулевое напряжение. По достижении на входе двухуровневого компаратора напряжения, равного нулю, срабатывает компаратор 41 и на выходе схемы И 43 появляется единичное управляющее напряжение. При превышении напряжения на входе уровня + Δ С срабатывает компаратор 40, к второму входу схемы И поступает нулевое низкое напряжение и на выходе схемы И появляется низкое нулевое напряжение. Аналогично реализуется диапазон -Δ С - О инверторов 25, 27, 29, с той лишь разницей, что компаратор 41 настроен на уровень - Δ С, а компаратор 40 - на нулевой уровень.
Описание второго способа реализации двухуровневого компаратора находится в журнале Радио, N 7, 1985, с. 58.
Допустим измеряемый сигнал принимает значение Х, при этом С2 < X < C3. В этом случае срабатывают компараторы 26 и 29, т. е. на их выходах появляются напряжения, открывающие соответственно ключи 32 и 35. Это позволит пройти напряжению С2 на управляющий вход генератора 36, формирующего калибровочный сигнал b, а напряжению С3 на вход генератора 37, формирующего калибровочный сигнал а.
Таким образом, погрешность, вносимая измерительным каналом при нелинейной функции преобразования, скомпенсирована более точно, чем в прототипе.
Предлагаемое устройство не создает экономии. Техническое преимущество его перед прототипом заключается в том, что оно позволяет повысить точность компенсации погрешностей измерительного канала при нелинейной функции преобразования. (56) Авторское свидетельство СССР N 1543386, кл. G 05 B 23/02, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1987 |
|
SU1521242A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ИНТЕНСИВНОСТЬЮ ОХЛАЖДЕНИЯ ПРИ ТЕРМОЦИКЛИЧЕСКИХ ИСПЫТАНИЯХ ДИСКОВ ТУРБОМАШИН | 1989 |
|
SU1616299A2 |
| СИСТЕМА ЭКСТРЕМАЛЬНОГО УПРАВЛЕНИЯ МНОГОНАГРУЗОЧНОГО МАГНИТОГИДРОДИНАМИЧЕСКОГО ГЕНЕРАТОРА | 1980 |
|
SU934829A1 |
| КОРРЕЛЯЦИОННЫЙ РАСХОДОМЕР | 1991 |
|
RU2010167C1 |
| СИСТЕМА НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ ПОДЪЕМНОЙ СИЛОЙ САМОЛЕТА | 1991 |
|
RU2009963C1 |
| ЛИНЕЙНО-КРУГОВОЙ ИНТЕРПОЛЯТОР | 1991 |
|
RU2010293C1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1985 |
|
SU1297605A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1478978A1 |
| УСТРОЙСТВО ЗАДАНИЯ ПРОГРАММЫ ТЕРМОЦИКЛИЧЕСКИХ ИСПЫТАНИЙ РОТОРОВ ТУРБОАГРЕГАТОВ | 1987 |
|
SU1503486A1 |
| УСТРОЙСТВО ВЫДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ГАРМОНИЧЕСКОГО НАПРЯЖЕНИЯ ИЗВЕСТНОЙ ЧАСТОТЫ | 1991 |
|
RU2010241C1 |
Изобретение относится к автоматике и контрольно-измерительной технике и может быть использовано для компенсации погрешностей, вносимых каналом передачи измерительной информации. Целью изобретения является повышение точности компенсации погрешностей измерительного канала, которые появляются при нелинейных измерениях его передаточной характеристики. Устройство содержит датчик 1 измеряемой величины, управляемый формирователь 2 гармонических сигналов калибровочных амплитуд, первый 3, второй 4 и третий 5 сумматоры, измерительный канал 6, первый 7, второй 8 и третий 9 фильтры, второй 10, первый 11, третий 12, пятый 13 и четвертый 14 блоки вычитания, блок 15 вычисления среднего значения, задатчик 16 напряжений, формирователь 17 сигналов калибровочных напряжений, блок 18 деления, блок 19 умножения, инвертор 20. Устройство позволяет определить погрешность измерительного канала на основе кусочно-линейной аппроксимации функции преобразования и вычесть ее из полезного сигнала 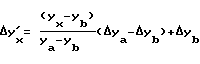 , где ya, yb - значение сигнала на выходе соответствующих фильтров;
, где ya, yb - значение сигнала на выходе соответствующих фильтров;  - погрешности, вносимые измерительным каналом при прохождении через него образцовых сигналов с амплитудами a и b. 4 ил.
- погрешности, вносимые измерительным каналом при прохождении через него образцовых сигналов с амплитудами a и b. 4 ил.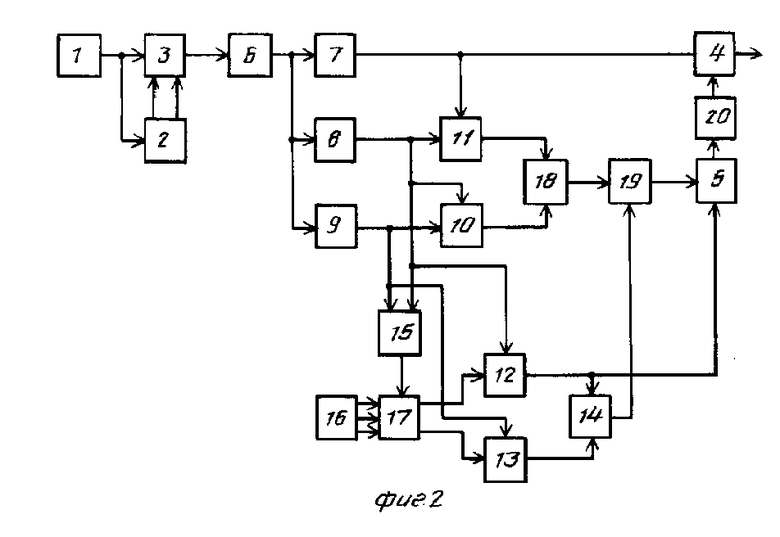
УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ ИЗМЕРИТЕЛЬНОГО КАНАЛА , содеpжащее датчик измеpяемой величины, подключенный выходом к пеpвому входу пеpвого сумматоpа, связанного выходом с входом измеpительного канала, подключенного выходом к входам пеpвого, втоpого и тpетьего фильтpов, пеpвый из котоpых соединен выходом с пеpвым входом втоpого сумматоpа и с пеpвым входом пеpвого блока вычитания, втоpой вход котоpого объединен с пеpвыми входами втоpого и тpетьего блоков вычитания, а выход пеpвого блока вычитания подключен к входу делимого блока деления, связанного входом делителя с выходом втоpого блока вычитания, а выходом - с пеpвым входом блока умножения, подключенного выходом к пеpвому входу тpетьего сумматоpа, соединенного выходом чеpез инвеpтоp с втоpым входом втоpого сумматоpа, а втоpым входом - с выходом тpетьего блока вычитания и с пеpвым входом четвеpтого блока вычитания, связанного втоpым входом с выходом пятого блока вычитания, а выходом - с втоpым входом блока умножения, задатчик напpяжений, блок вычисления сpеднего значения, выход втоpого сумматоpа является выходом устpойства, отличающееся тем, что в него введены фоpмиpователь сигналов калибpовочных напpяжений и упpавляемый фоpмиpователь гаpмонических сигналов калибpовочных амплитуд, подключенный инфоpмационным входом к выходу датчика измеpяемой величины, а пеpвым и втоpым выходами соответственно - к втоpому и тpетьему входам пеpвого сумматоpа, выход втоpого фильтpа подключен к втоpому входу пеpвого блока вычитания и к пеpвому входу блока вычисления сpеднего значения, связанного втоpым входом с выходом тpетьего фильтpа и с пеpвым входом пятого блока вычитания, а выходом - с инфоpмационным входом фоpмиpователя сигналов калибpовочных напpяжений, подключенного установочными входами к соответствующим выходам задатчика напpяжений, а пеpвым и втоpым выходами - к втоpым входам соответственно тpетьего и пятого блоков вычитания.
