Изобретение относится к автоматике и вычислительной технике, в частности к телевизионным устройствам для определения координат точечных световых объектов, и может быть использовано в оптической локации, системах астронавигации и телевизионной автоматики.
Целью изобретения является повышение быстродействия телевизионного координатора.
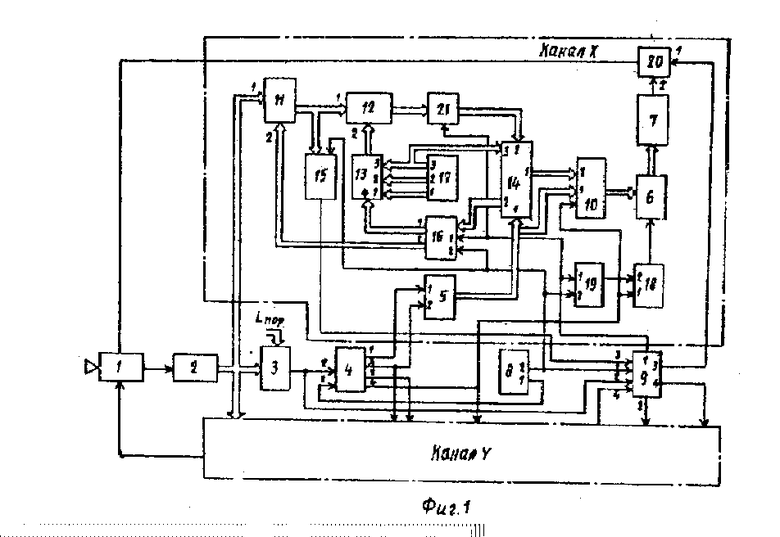
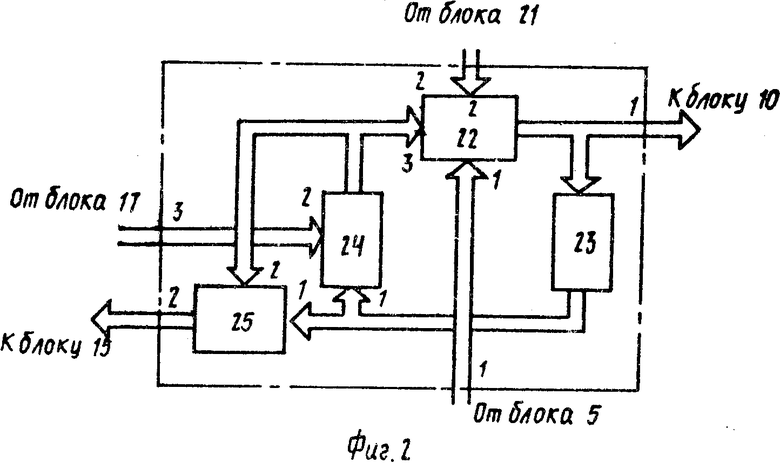
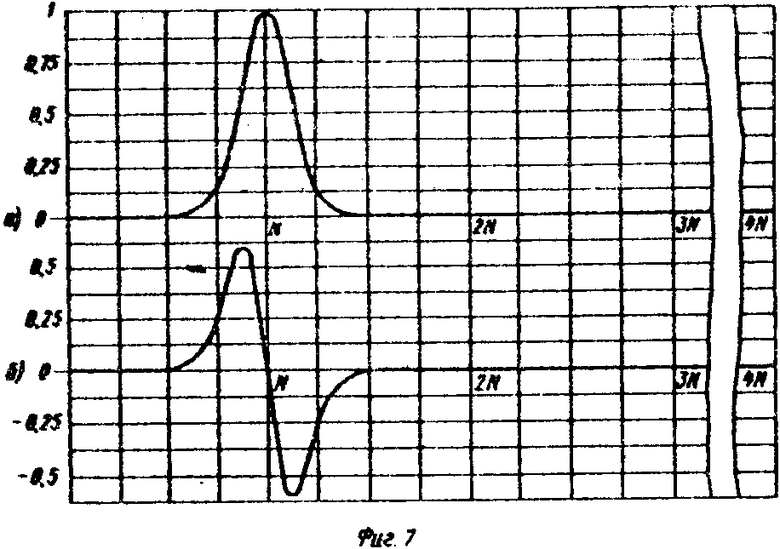
На фиг. 1 приведена структурная электрическая схема телевизионного координатора; на фиг. 2 - структурная электрическая схема цифрового фильтра; на фиг. 3 - структурная электрическая схема формирователя весовых коэффициентов; на фиг. 4 - структурная электрическая схема анализатора ошибок; на фиг. 5 - структурная электрическая схема формирователя сигналов заданных функций; на фиг. 6 - диаграмма работы устройства; на фиг. 7 - функция и производная функция видеосигнала; на фиг. 8 - схема транспонирования.
Телевизионный координатор содержит диссекторную телекамеру 1, аналого-цифровой преобразователь (АЦП) 2, компаратор 3, блок 4 переключения режимов работы, реверсивный счетчик 5, регистр 6, цифроаналоговый преобразователь (ЦАП) 7, синхрогенератор 8, формирователь 9 следящего крестообразного растра, мультиплексор 10, вычитатель 11, умножитель 12, формирователь 13 весовых коэффициентов, цифровой фильтр 14, анализатор 15 ошибок, формирователь 16 сигналов заданных функций, блок 17 памяти, элемент ИЛИ 18, элемент И 19, сумматор 20 аналоговых сигналов и блок 21 элементов И.
Цифровой фильтр 14 содержит сумматор 22, блок 23 задержки, умножитель 24, вычитатель 25.
Формирователь 13 весовых коэффициентов содержит умножители 26, 27, сумматор 28, умножители 29, 30, сумматор 31, блок 32 вычисления обратного значения, умножители 33, 34, вычитатель 35, умножитель 36, блок 37 задержки, схемы 38 и 39 транспонирования. Анализатор 15 ошибок содержит два элемента И 40 и 41, два инвертора 42 и 43, мультиплексор 44, четыре регистра 45, 46, 47 и 48, сумматор 49, компаратор 50 и формирователь 51 импульсов.
Формирователь 16 сигналов заданных функций содержит два блока 52 и 53 постоянной памяти, сумматор 54 и счетчик 55.
Устройство работает в двух режимах: режиме поиска и режиме определения координат.
В режиме поиска по строкам и кадрам формируются ступенчатые пилообразные напряжения для создания поискового растра. Это обеспечивается тем, что триггер блока 4 переключения режимов работы в исходном состоянии находится в "1" и через элемент И на счетный вход реверсивного счетчика 5 и на входы делителей блока 4 переключения режимов поступают частоты элементов поиска. Импульсы с выходов делителей блока 4 реверсируют соответственно по достижении конца строк и кадров счетчики 5 каждого канала формирования сигналов координат Х и Y. Логическая "1", поданная на управляющий вход мультиплексора 10 и через элемент ИЛИ 18 на управляющий вход регистра 6, позволяет прямо передавать число, поступающее со счетчика 5 через мультиплексор 10 на вход ЦАП 7, который преобразует число в ток, отклоняющий апертуру в диссекторе по строкам и кадрам.
Поступающий с диссектора видеосигнал преобразуется АЦП 2 в цифровую форму и сравнивается на компараторе 3 с уровнем порога Lпор, который выбирается, исходя из заданного критерия обнаружения. При превышении поступающей смесью сигнала и шума уровня порога (фиг. 6а) на выходе компаратора 3 появляется перепад напряжения, опрокидывающий триггер блока 4 переключения режимов и запускающий формирователь 9 следящего крестообразного растра.
Устройство переходит в режим определения координат. В этот момент с переключением триггера блока 4 переключения режимов работы мультиплексор 10 переключается на другой канал, а грубо определенная координата объекта записывается в регистр 6 и поступает на вход цифрового фильтра 14 в виде начального значения оценки вектора состояния  (О/О). Формирователь 9 следящего крестообразного растра вырабатывает напряжения развертки крестообразного растра (фиг. 6 г, д), поступающие на входы отклонения диссектора (вид растра показан на фиг. 6е).
(О/О). Формирователь 9 следящего крестообразного растра вырабатывает напряжения развертки крестообразного растра (фиг. 6 г, д), поступающие на входы отклонения диссектора (вид растра показан на фиг. 6е).
Формирователь 9 следящего крестообразного растра работает следующим образом.
Сброс триггера формирователя 9, обусловленный поступлением сигнала с выхода компаратора 3, снимает потенциал, поступающий на вход сброса счетчика и удерживающий его в нулевом состоянии. Перепад напряжения через элемент ИЛИ записывает по управляющему входу параллельной записи код (-N). Число равно половине общего числа дискретных элементов крестообразного растра по одной из координат. Поступающие с второго выхода синхрогенератора 8 импульсы формирования крестообразного растра начинают увеличивать содержимое счетчика формирователя 9 сначала до обнуления, а затем до достижения на выходе счетчика числа N. В это время одна из двух схем И формирователя 9 находится в закрытом состоянии благодаря потенциалу на входе запрета этой схемы. Другая схема подключена к инверсному выходу триггера формирователя 9 и поэтому пропускает на выход код, поступающий с выхода счетчика. Соответствующий ЦАП формирователя 9 преобразует число в ток, отклоняющий апертуру диссектора по данной координате. При достижении на выходе счетчика формирователя 9 кода N срабатывает схема сравнения, импульс с выхода которой через элемент ИЛИ переворачивает триггер формирователя 9 в противоположное состояние и вновь записывает в счетчик код (-N). Формирование повторяется для другой координаты.
Поступающий с диссектора видеосигнал (фиг. 6б) после АЦП 2 поступает на суммирующий вход вычитателя 11, на другой вход которого поступает код видеосигнала с формирователя 16 сигналов заданных функций.
Полученный на выходе вычитателя 11 код разности несет информацию о величине ошибки оценивания.
 (n)= (S{ X(n), n} +Nш) - S{ Ф
(n)= (S{ X(n), n} +Nш) - S{ Ф (n, n-1)
(n, n-1) (n-1/n-1), n} , где S{ ·} - нелинейная функция, аппроксимирующая форму видеосигнала;
(n-1/n-1), n} , где S{ ·} - нелинейная функция, аппроксимирующая форму видеосигнала;
Nш - шум измерения, вызванный наличием в канале измерения фона, а Φx (n, n - 1), равно как и Φy (n, n - 1) - априори известные переходные матрицы состояния по координатам Х и Y.
Компонентами векторов состояния X(n) и Y(n) являются координаты центра объекта, величины скорости, ускорения и другие величины и различные комбинации величин, связанные как с самим объектом и характеристиками его движения, так и с различными параметрами, например с методами сопровождения.
Векторы состояния в (n - 1) и (n) циклах работы устройства связаны зависимостями
X(n) = Φx (n, n - 1) X(n - 1);
Y(n) = Φy (n, n - 1) Y(n - 1).
При равноускоренном движении объекта по фотокатоду диссектора уравнения состояния для канала Х могут быть записаны
X1(n + 1) = X1(n) + X2(n) ˙ Δ t;
X2(n + 1) = X2(n) + X3(n) ˙ Δ t;
X3(n + 1) = X3(n). где X1(n + 1) - текущие координаты центра объекта X2(n + 1) и (X3(n + 1) - соответственно составляющие скорости и ускорения, выраженные в количестве элементов растра, на которые перемещается и ускоряется изображение объекта за время одного цикла дискретизации Δ t.
В матричной форме можно записать


Ошибка оценивания  (n), выработанная в n-м цикле, умножается в умножителе 12 на коэффициент усиления К(n), поступающий из формирователя 13 весовых коэффициентов, и далее проходит через блок 21 элементов И, и затем в цифровом фильтре 14 на сумматоре 22 суммируется с задержанной на такт в блоке 23 задержки оценкой
(n), выработанная в n-м цикле, умножается в умножителе 12 на коэффициент усиления К(n), поступающий из формирователя 13 весовых коэффициентов, и далее проходит через блок 21 элементов И, и затем в цифровом фильтре 14 на сумматоре 22 суммируется с задержанной на такт в блоке 23 задержки оценкой  (n - 1/n - 1), умноженной в умножителе 24 на переходную матрицу состояния Φx (n, n - 1), поступающую на второй вход фильтра 14 с соответствующего выхода блока 17 памяти.
(n - 1/n - 1), умноженной в умножителе 24 на переходную матрицу состояния Φx (n, n - 1), поступающую на второй вход фильтра 14 с соответствующего выхода блока 17 памяти.
Таким образом, на выходе сумматора 22, т. е. на первом выходе цифрового фильтра 14 в конце текущего цикла формируется оценка положения центра изображения объекта, которая через мультиплексор 10 поступает на вход регистра 6 и записывается импульсами записи с второго выхода синхрогенератора 8. Прохождение импульсов записи в данный канал стробируется на элементе И 19 потенциалом на соответствующем выходе триггера формирователя 9 следящего крестообразного растра. Код с выхода регистра 6 через ЦАП 7 и сумматор 20 совмещает центры крестообразного растра и изображения объекта.
Величина Φx (n, n - 1) (n - 1/n - 1) является прогнозом оценки вектора состояния
(n - 1/n - 1) является прогнозом оценки вектора состояния  (n - 1/n - 1) c n - 1 на n-й шаг и записывается как
(n - 1/n - 1) c n - 1 на n-й шаг и записывается как  (n/n - 1). Процесс прогнозирования осуществляется не только при работе данного, но и другого каналов. В этом случае нулевой код с выхода блока 21 элементов И суммируется в сумматоре 22 с ранее полученной оценкой, и затем в умножителе 24 вычисляется прогноз оценки.
(n/n - 1). Процесс прогнозирования осуществляется не только при работе данного, но и другого каналов. В этом случае нулевой код с выхода блока 21 элементов И суммируется в сумматоре 22 с ранее полученной оценкой, и затем в умножителе 24 вычисляется прогноз оценки.
Прогноз оценки вектора состояния используется в качестве начального значения оценки при включении данного канала в работу. На выходе вычитателя 25 формируется прогнозируемая величина смещения центра объекта относительно центра крестообразного растра в текущем цикле по данной координате. Это смещение поступает на вход формирователя 16 сигналов заданных функций для выработки формы видеосигнала и производной функции от формы видеоимпульса в прогнозируемой точке. Эти величины используются для вычисления новой ошибки оценивания в (n + 1) цикле. Ошибки оценивания в каждом такте поступают на компаратор 50 для вычисления абсолютного значения в анализаторе 15. Без изменения пропускаются на выход положительные числа, т. е. имеющие нулевой знаковый разряд, и инвертируются числа с единичным знаковым разрядом. Последовательность положительных чисел запоминается в регистрах 45, 46, 47, 48. С каждым тактом одно из ранее записанных чисел теряется, все числа сдвигаются в последующие регистры, а в самый первый регистр 45 записывается поступившее значение. Таким образом, регистры хранят коды, соответствующие одновременно нескольким циклам развертки следящего растра. Эти коды суммируются в сумматоре 49 для вычисления средней ошибки оценивания за С циклов формирования растра. На выходе сумматора 49 предусматривается, в общем случае, схема деления числа на С. Но при выборе С из ряда чисел степени числа 2, т. е. 1, 2, 4, 8, . . . 2l, схема деления на С отсутствует, так как в выходном числе не используется l = log2C младших разрядов, что равносильно операции деления на С. Усредненная за С циклов ошибка оценивается и сравнивается на компараторе 50 анализатора 15 с уровнем порога Nпор, величина которого выбирается, исходя из требуемой точности оценивания и условий работы телевизионного координатора. Характер проведения ошибки оценивания показан на фиг. 6а. Известно, что ошибка оценивания с течением времени стремится к нулю и величина разброса ее относительно среднего значения обусловлена лишь характеристиками существующих в системе шумов.
Точность оценивания координат определяется величиной отношения сигнал/шум ΨA и параметрами траектории движения объекта. Таким образом, зная ΨA или вычисляя его при моделировании, определяем значение предела точности оценивания.
При достижении заданной точности оценивания процесс оценивания по данной координате прекращается, так как по перепаду на выходе компаратора 50 на выходе формирователя 51, т. е. на выходе анализатора 15 формируется импульс, поступающий на один из входов элемента ИЛИ формирователя 9 следящего крестообразного растра. Сигнал с выхода элемента ИЛИ формирователя 9, перебрасывая его триггер, переключает каналы и досрочно записывает в счетчик формирователя 9 число (-N). Таким образом сокращается время работы текущего канала при достижении заданной точности оценивания (фиг. 6 г, д, ж). Формирователь 13 весовых коэффициентов вырабатывает коэффициенты усиления К(n) по формулам оптимальной нелинейной фильтрации.
K(n)= P(n/n-1)·  ×
×
×  ·P(n/n-1)·
·P(n/n-1)·  + R
+ R , где P(n/n - 1) - априорная ковариационная матрица ошибок фильтрации;
, где P(n/n - 1) - априорная ковариационная матрица ошибок фильтрации;
R(n) - ковариационная матрица шумов наблюдения; - известная функция, производная от формы видеосигнала в точке оценки
- известная функция, производная от формы видеосигнала в точке оценки  (n/n - 1).
(n/n - 1).
Априорная ковариационная матрица вычисляется по формуле
P(n/n - 1) = Φ (n, n - 1) P(n - 1) x
x Φт (n, n -1) + G(n), где P(n - 1) - апостериорная ковариационная матрица ошибок;
G(n) - известная переходная матрица шумов состояния.
Апостериорная ковариационная матрица ошибок P(n) вычисляется по формуле
P(n)=  1-K(n)
1-K(n) P(n/n-1), где I - единичная диагональная матрица.
P(n/n-1), где I - единичная диагональная матрица.
Вычисление коэффициентов K(n) и матриц P(n/n - 1) и P(n) в формирователе 13 весовых коэффициентов начинается с момента работы устройства в режиме определения координат. При этом вводится начальное значение Р(о), которое либо задается оператором в начале работы устройства, либо определяется автоматически вычислителем начального значения ковариационной матрицы ошибки оценивания вектора состояния. Поступающие с выходов блока 17 памяти матричные величины Φ (n/n - 1) и G(n), R(n) хранятся в виде констант и могут быть изменены.
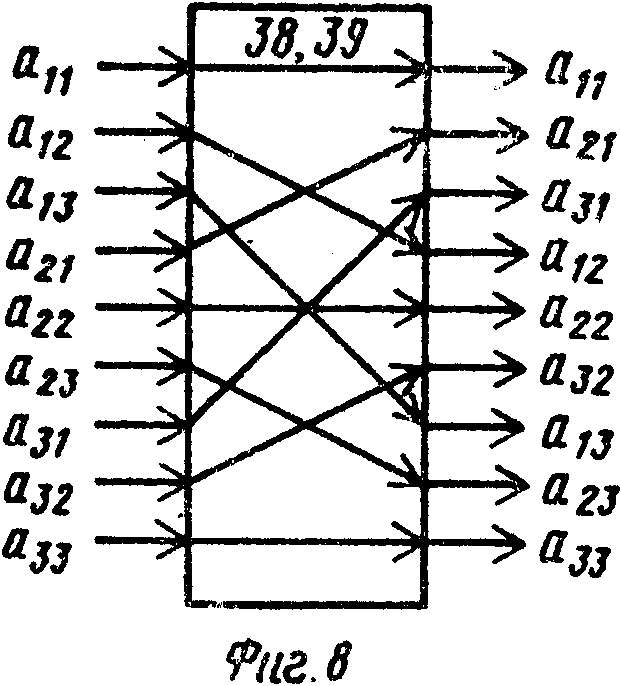
Применение в формирователе 13 схем 38 и 39 транспонирования выполняется переброской групп проводов. Пример выполнения схемы транспонирования для матрицы А размером 3 х 3 приведен на фиг. 8.
A =  Aт=
Aт= 
На выходе сумматора 28 формирователя 13 весовых коэффициентов вычисляется априорная дисперсия ошибки оценивания в текущем цикле работы
P(n/n - 1) = Φ (n, n - 1) P(n - 1) x
x Φт (n, n - 1) + G(n).
С помощью умножителей 29, 30, 33, сумматора 31 и блока 32 вычисления обратного значения формируется текущий коэффициент усиления
K(n)= P(n/n-1)·  ×
×



 .
.
Дальнейшие вычисления заключаются в получении апостериорной дисперсии P(n). Вычисления проводятся с помощью умножителей 34, 36 и вычитателя 35 с единичной матрицей 1 на суммирующем входе.
P(n)=  1-K(n)
1-K(n) P(n/n-1).
P(n/n-1).
Блок 37 задержки обеспечивает выдачу величины P(n) в качестве начального значения дисперсии в (n + 1) цикле работы.
Формирователь 16 сигналов заданных функций (фиг. 5) работает следующим образом.
В блоках 52 и 53 постоянной памяти записаны коды формы видеосигнала и производной функции от формы видеосигнала в соответствующие моменты дискретизации (фиг. 7а, б).
Смещение центра объекта относительно центра крестообразного растра в текущем цикле развертки, вычисленное в вычитателе 25 цифрового фильтра 14, поступает на первый вход сумматора 54 формирователя 16 сигналов заданных функций. На второй вход сумматора 54 поступает код со счетчика 55, однозначно связанный с текущим положением сканирующей апертуры на фотокатоде диссектора. Для этого, в начале каждого сканирования следящего растра по данной координате в счетчике 55 снимается потенциал с входа сброса.
Потенциал сброса снимается в момент переключения триггера формирователя 9 следящего крестообразного растра, связанного одним из выходов с входом сброса счетчика 55 формирователя 16. Поступающие с второго выхода синхрогенератора 8 импульсы увеличивают содержимое счетчика 55 синхронно с формированием следящего крестообразного растра в формирователе 9. Линейно изменяющийся код с выхода сумматора 54 формирует на выходе блоков 52 и 53 текущие отсчеты соответствующих функций, сдвинутых с учетом смещения, поступившего на первый вход сумматора 54.
Преимущества данного телевизионного координатора заключаются в возможности сопровождения и определения координат точечных световых объектов, движущихся с более высокой скоростью. Это достигается уменьшением времени сканирования следящего крестообразного растра по каждой координате по мере уменьшения ошибки оценивания координат центра изображения объекта. Применение оптимального нелинейного алгоритма фильтрации в контуре автоматического управления положением следящего крестообразного растра позволяет также повысить точность определения координат движущегося светового объекта. (56) Авторское свидетельство СССР N 811302, кл. G 06 K 11/00, 1981.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1985 |
|
SU1454225A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1517737A1 |
| ИЗМЕРИТЕЛЬ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ | 1986 |
|
SU1436846A1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1478978A1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ИЗОБРАЖЕНИЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 1989 |
|
SU1657043A1 |
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 1985 |
|
SU1286089A1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ТОЧЕЧНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1985 |
|
SU1493074A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1986 |
|
SU1412577A1 |
| УСТРОЙСТВО ВЫДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ГАРМОНИЧЕСКОГО НАПРЯЖЕНИЯ ИЗВЕСТНОЙ ЧАСТОТЫ | 1991 |
|
RU2010241C1 |
Изобретение относится к автоматике и вычислительной технике. Цель изобретения - повышение быстродействия телевизионного координатора. Координатор содержит диссекторную телекамеру 1, АЦП 2, компаратор 3, блок 4 переключения режимов работы, синхрогенератор 8, формирователь 9 следящего крестообразного растра и два канала формирования сигналов координат X и Y, состоящие каждый из реверсивного счетчика 5, регистра 6, ЦАП 7, мультиплексора 10, вычитателя 11, умножителя 12, формирователя 13 весовых коэффициентов, цифрового фильтра 14, анализатора 15 ошибок, формирователя 16 сигналов заданных функций, блока 17 памяти, элемента ИЛИ 18, элемента И 19, сумматора 20 аналоговых сигналов и блока 21 элементов И. Координатор работает последовательно в двух режимах: режиме поиска и режиме определения координат. При этом обеспечивается возможность сопровождения и определения координат точечных световых объектов, движущихся с более высокой скоростью. Это достигается уменьшением времени сканирования следящего крестообразного растра по каждой координате по мере уменьшения ошибки оценивания координат центра изображения объекта. Использование оптимального нелинейного алгоритма фильтрации в контуре автоматического управления положением следящего крестообразного растра позволяет повысить точность определения координат движущегося светового объекта. Координатор по пп. 2 - 5 формулы отличается выполнением фильтра 14, формирователей 13 и 16 и анализатора 15. 4 з. п. ф-лы, 8 ил.