(54) СЕЯЛКА С АВТОМАТИЧЕСКОЙ СТАБИЛИЗАЦИЕЙ ЗАГЛУБЛЕНИЯ
1
Изобретение относится к сельскохозяйствен ному машиностроению и предназначено для посева сельскохозяйственных культур.
Известна сеялка с автоматической стабилизацией заглубления соишиков, включающая раму, на которой установлены сошники мембранный датчик, размещенный в семенном ящике и связанный с дросселем, присоединенным к гидроцилиндру параллельно с управляемым датчиком 1.
Однако в этой сеялке не обеспечивается необходимая равномерность заделки семян по глубине.
Известна также сеялка с автоматической стабилизации заглубления сощников, включающая сощники, раму их подвески, датчик и задатчик глубины хода сошников, механизм заглубления сощников 2.
Однако в этой сеялке также присущ выщеуказанный недостаток, так как для автоматической стабилизации В ней используется не изменение глубины хода сошников, а фактор его вызывающий - изменении скорости движения -, а другие факторы (изменение плотноСОШНИКОВ
сти почвы, налипание почвы на колеса и др.) не учитываются.
Цель изобретения - повышение равномерности распределения семян по глубине.
Указанная цель достигается тем, что сеялка с автоматической стабШ1иза1щей заглубления сошников снабжена двумя неподвижно закрепленными парами подвески сошников бороздо образователями и время-импульсным преобразователем, входы которого подключены соот10в,етственно к выходам датчика и задатчика . глубины хода сощников, а выход - к управляющему входу механизма заглубления сощников, причем датчик глубины хода сошников вьшолнен радиочастотным со сканирую15щей диаграммой направленности и неподвижно закреплен на раме подвески сощников.
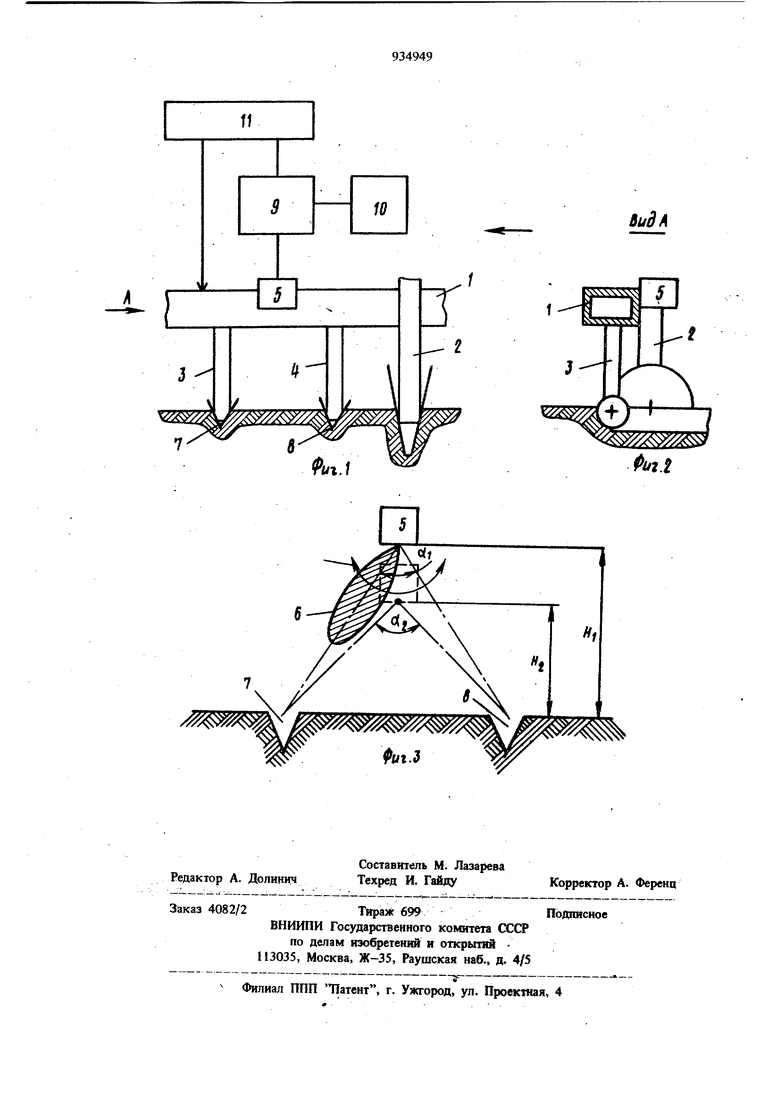
На фиг. 1 схематично изображена сеялка с автоматической стабилизацией заглубления
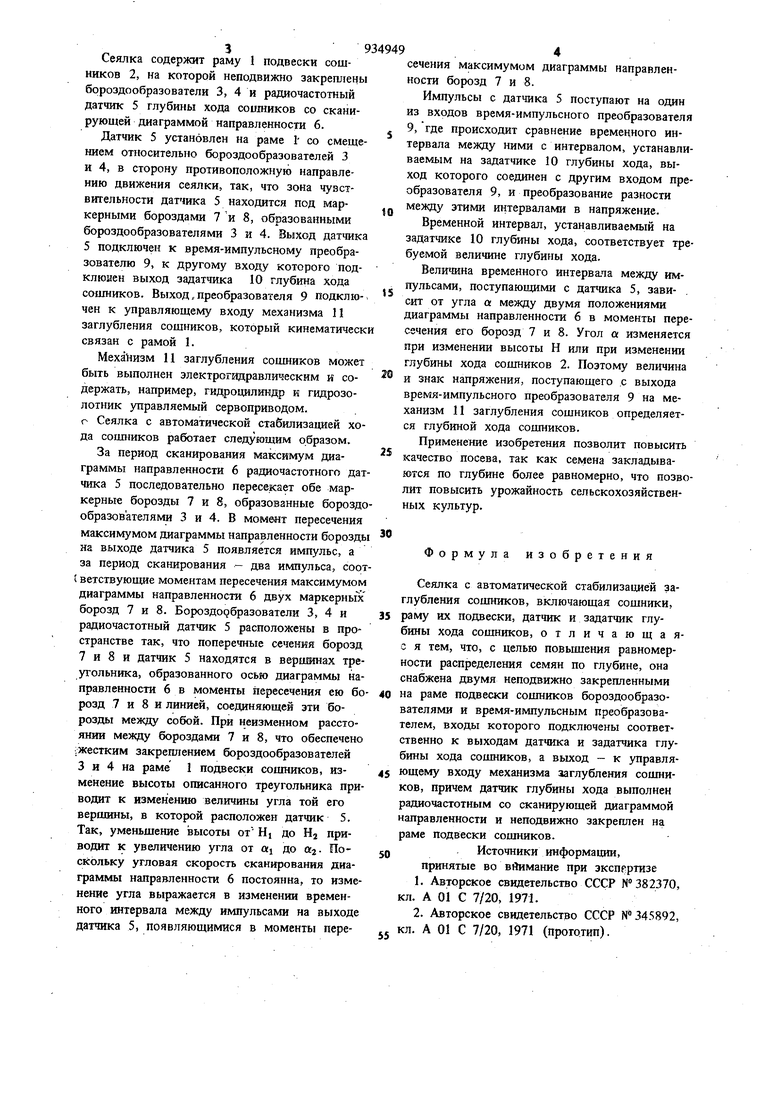
20 сошшп ов; на. фиг. 2 - то же, вид А на фиг. 1; на фиг. 3 - схема, поясняющая определение глубины хода сошникор радиочастотным датчиком.
393
Сеялка содержит раму 1 подвески сошников 2, на которой неподвижно закреплены бороздообразователи 3, 4 и радиочастотный датчик 5 глубины хода соишиков со сканирующей диаграммой направленности 6.
Датчик 5 установлен на раме 1 со смещением относительно бороздообразователей 3 и 4, в сторону противоположную направлению движения сеялки, так, что зона чувствительности датчика 5 находится под маркерными бороздами 7 и 8, образованными бороздообразователями 3 и 4. Выход датчика 5 подключен к время-импульсному преобразователю 9, к другому входу которого подклюиен выход задатчика 10 глубина хода сошников. Выход,преобразователя 9 подключен к управляющему входу механизма 11 заглубления сощников, который кинематически связан с рамой 1.
Механизм 11 заглубления сошников может быть выполнен электрогвдравлическим и содержать, например, гидроцилиндр к гидрозолотник управляемый сервоприводом. о Сеялка с автоматической стабилизацией хода сошников работает следующим образом.
За период сканирования максимум диаграммы направленности 6 радиочастотного датчика 5 последовательно пересекает обе маркерные борозды 7 и 8, образованные бороздообразователями 3 и 4. В момент пересечения максимумом диаграммы направленности борозды на выходе датчика 5 появляется импульс, а за период сканирования - два импульса, соотi ветствующие моментам пересечения максимумом диаграммы направленности 6 двух маркерных борозд 7 и 8. Бороздодбразователи 3, 4 и радиочастотный датчик 5 расположены в пространстве так, что поперечные сечения борозд 7 и 8 и датчик 5 находятся в вершинах треугольника, образованного осью диаграммы направленности 6 в моменты пересечения ею бо розд 7 и 8 и линией, соединяющей эти борозды между собой. При неизменном расстоянии между бороздами 7 и 8, что обеспечено .жестким закреплением бороздообразователей 3 и 4 на раме 1 подвески сошников, изменение высоты описанного треугольника приводит к изменению величины угла той его вершины, в которой расположен датчик 5. Так, уменьшение высоты от HI до Hj приводит к увеличению угла от «j до «2- Поскгольку угловая скорость сканирования диаграммы направленности 6 постоянна, то изменение угла выражается в изменении временного интервала между импульсами на выходе датчика 5, появляющимися в моменты пересечения максимумом диаграммы направленности борозд 7 и 8.
Импульсы с датчика 5 поступают на один из входов время-импульсного преобразователя 9, где происходит сравнение временного интервала между ними с интервалом, устанавливаемым на задатчике 10 глубины хода, выход которого соединен с другим входом преобразователя 9, и преобразование разности между этими интервалами в напряжение.
Временной интервал, устанавливаемый на задатчике 10 глубины хода, соответствует требуемой величине глубины хода.
Величина временного интервапа между импульсами, поступающими с датчика 5, зави- . сит от угла а между двумя положениями диаграммы направленности 6 в моменты пересечения его борозд 7 и 8. Угол а изменяется при изменении высоты Н или при изменении глубины хода сошников 2. Поэтому величина и знак напряжения, поступающего .с выхода время-импульсного преобразователя 9 на механизм 11 заглубления сошников определяется глубиной хода сощников.
Применение изобретения позволит повысить качество посева, так как семена закладываются по глубине более равномерно, что позволит повысить урожайность сельскохозяйственных культур.
Формула изобретения
Сеялка с автоматической стабилизацией заглубления сошников, включающая сошники, раму их подвески, датчик и задатчик глубины хода сошников, отличающая0 я тем, что, с целью повышения равномерности распределения семян по глубине, она снабжена двумя неподвижно закрепленными на раме подвески соашиков бороздообразователями и время-импульсным преобразователем, входы которого подключены соответственно к выходам датчика и задатчика глубины хода сошников, а выход - к управляющему входу механизма заглубления сощников, причем датчик глубины хода выполнен радиочастотным со сканирующей диаграммой направленности и неподвижно закреплен на раме подвески сошников.
Источники информации, принятые во вйимание при экспертизе
1.Авторское свидетельство СССР №382370, кл. А 01 С 7/20, 1971.
2.Авторское свидетельство СССР N 345892, кл. А 01 С 7/20, 1971 (прототип).
6ид/(
t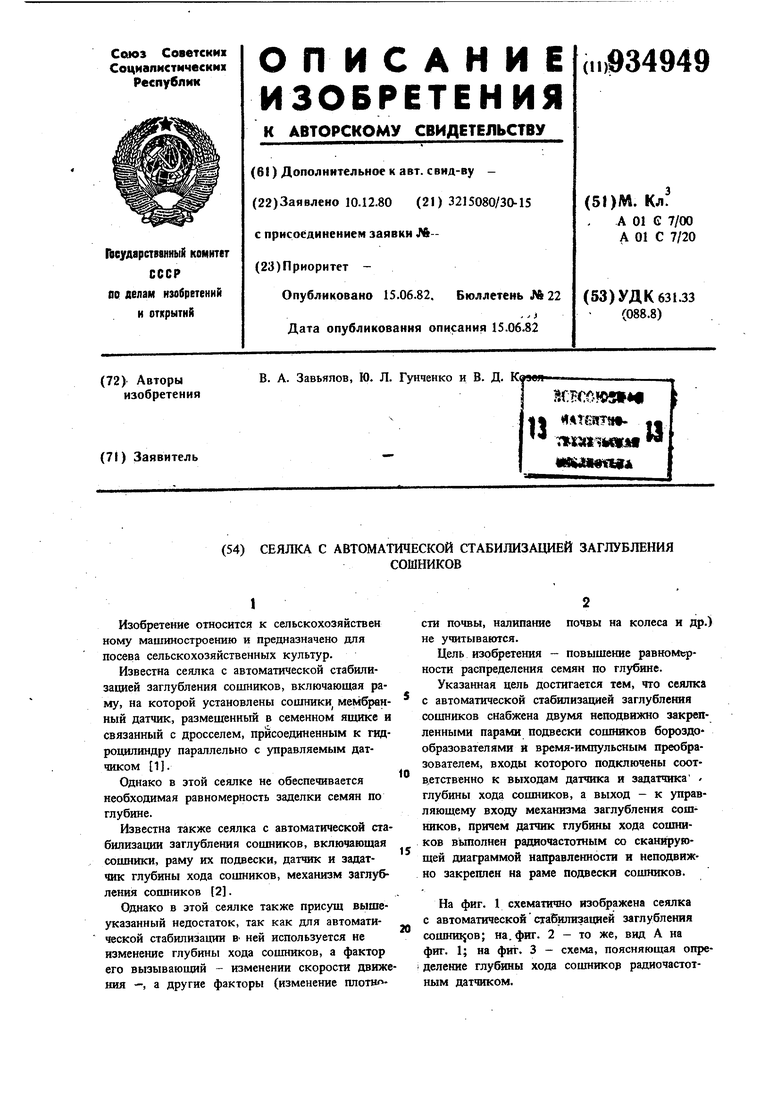
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования глубины хода сошников сеялки | 1980 |
|
SU923395A1 |
| Лесная сеялка | 1958 |
|
SU119735A1 |
| Ручная селекционная сеялка | 1960 |
|
SU137707A1 |
| Устройство автоматической стабилизации заглубления сошников сеялки | 1980 |
|
SU934940A1 |
| Сеялка | 1979 |
|
SU858607A1 |
| СЕЯЛКА ДЛЯ ПРОПАШНЫХ КУЛЬТУР | 1970 |
|
SU261792A1 |
| Сошник-бороздообразователь поливных засеваемых борозд | 1952 |
|
SU96668A2 |
| УСТРОЙСТВО ДЛЯ ЗАГЛУБЛЕНИЯ СОШНИКОВ СЕЯЛКИ | 1972 |
|
SU345892A1 |
| Устройство для посева семян | 1983 |
|
SU1130203A1 |
| Устройство для образования и заделки борозд при высеве семян | 1983 |
|
SU1107774A1 |