I
Изобретение относится к сельскохозяйственному машиностроению, а именно к средствам автоматического управления технологическим процессом, и предназначено для применения на сеялках, преимущественно работающих на склонах.
Известно устройство для стабилизации глубины хода рабочих органов, в которое входит копирующий элемент, кинематически связанный через передаточный механизм с регулятором высоты положения рабочих органов, и гидрораспределитель lj .
Недостатком устройства является то, что его датчик определяет положение рамы орудия над поверхностью поля, а не глубину-хода рабочих органов, что снижает .качество стабилизации.
Наиболее близким по технической сущности к предлагаемому является устройство для регулирования глубины хода сошников сеялки, которое
содержит датчик глубины, соединенный с формирователем импульсов, блок преобразования, включающий блок сравнения -с задатчиком среднего значения глубины хода сошников, и блок управления, выполненный в виде электрогидравлического исполнительного механизма, который соединен со связанным с подвеской сошников рычажным механизмом J .
10
Недостатком устройства является следующее. При работе сеялки на склонах глубина колеи колеса, идущего ниже по склону, больше, чем глубина
15 колеи колеса, идущего выше по склону, что обуславливает расположение вала заглубления сошников не параллельно поверхности поля, а под некоторым углом, который зависит от
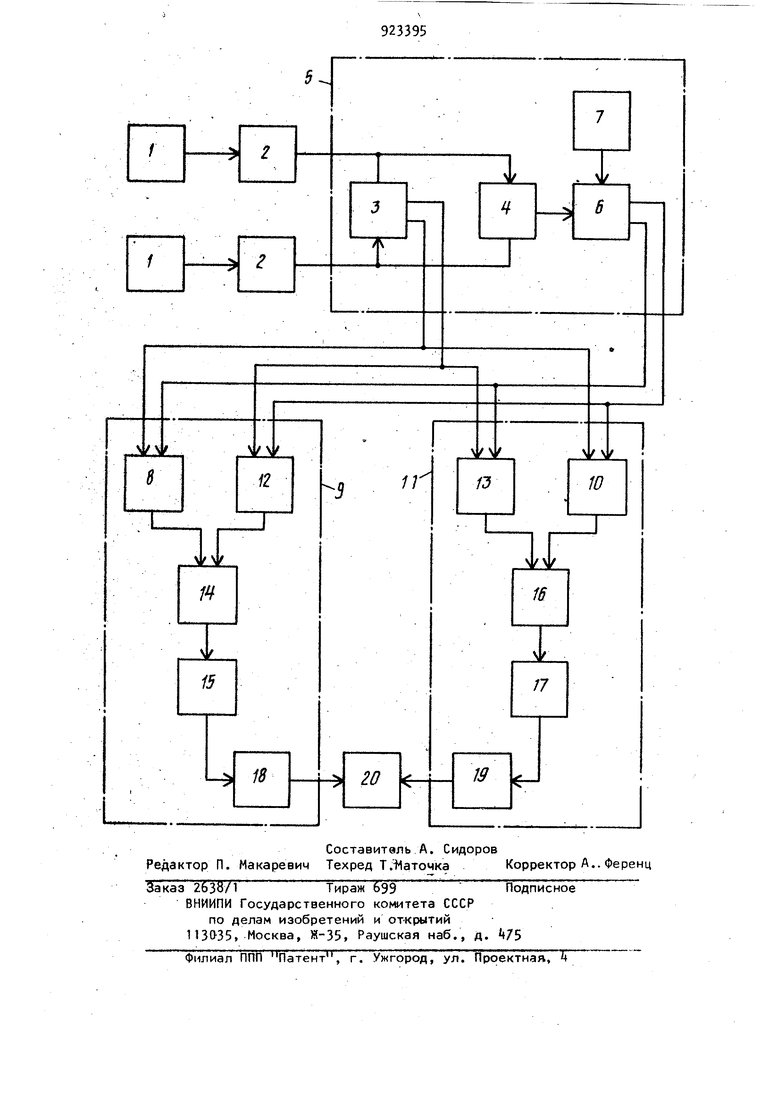
20 величины уклона, загрузки семенных ящиков, скорости движения и т.д. Таким образЬм,- глубина хода сошников, движущихся по склону. меньше, чем сошников, двигающихся ниже по склону. Указанное устройство стабилизирует глубину хода сошников только при упомянутых выше обычных возмущениях и не обеспечивает необходимого автоматического управления при таком специфическом возмущении как перекос вала заглубления сошников, что снижает качество работы сеялок при посеве на склонах. Цель изобретения - повышение точности регулирования глубины хода сошников при работе сеялки на склонах. Поставленная цель достигается тем, что устройство для регулирования глубины хода сошников сеялки, снабжено дополнительным датчиком глубины хода с формирователем сигналов и дополнительным блоком управ ления, блок преобразования снабжен дополнительным блоком сравнения и вычислителем среднеарифметическог значения, а основной и дополнительные блоки управления - сумматорами на Подъем, сумматорами на Опускание сошников и блоками сравнения управляющих сигналов, примем выходы формирователей подключены ко входам дополнительного блока сравнения и вычислителя среднеарифметического значения, выход которого подключен к блоку сравнения, при этом каждый из входов дополнительного блока сравнения подключен к сумматору на Подъем и сумматору на Опускание блоков управления, один из выходов блока сравнения соединен с сумматорами на Подъем, а другой - с сумматорами на Опускание блоков упра ления, причем выходы сумматоров на Подъем и на Опускание сошников электрически связаны через блоки сравнения управляющих сигналов с электрогидравлическими исполнительными механизмами, при этом последни через рычажную систему соединены с повеской сошников. На чертеже представлена блок-схе ма предлагаемого устройства. Устройство содержит два датчика 1 глубины хода сошников, подключенных к входам формирователей 2, выходы которых соединены с входами дополнительного блока 3 сравнения и вычислителя среднеарифметическо значения блока 5 преобразования. 54 Выход вычислителя k подключен к входу блока 6 сравнения, другой вход которого соединен с задатчиком 7 среднего значения глубины хода сошников. Один из выходов дополнительного блока 3 сравнения блока 5 преобразования подключен к сумматору 8 на Подъем блока 9 управления и к сумматору 10 на Опускание блока 11 управления, а другой выход - к сумматору 12 на Опускание блока 9 управления и сумматору 13 на Подъем блока 11 управления. Один из выходов блока 6 сравнения подключен к сумматорам 8 и 13 на Подъем, блоков 9 и 11 управления, а другой выход - к сумматорам 10 и 12 на Опускание блоков 9 и 12 управления. Выходы сумматоров 8 и 12 связаны через блок 1 с равнения с электрогидравлическим исполнительным механизмом 15 блока 9 управления, а выходы сумматоров 10 и 13 связаны через блок 16 сравнения с электрогидравлическим исполнительным механизмом 17 блока 11 управления. Исполнительные механизмы 15 и 17 соединены через рычажные системы 18 и 19 с подвеской сошников 20. Устройство работает следующим образом. Сигналы, величина которых пропорциональна заглублению крайних сошников сеялки, поступают с выходов датчиков 1 через формирователи 2, которые осуществляют усиление и фильтрование, на входы блока 3 сравнения и вычислителя k среднеарифметического значения блока 5 преобразователя, который осуществляет вычисление среднеарифметического значения поступающих сигналов. С его выхода преобразованный сигнал поступает на один из входов блока 6 сравнения, к другому входу которого подключен задатчик 7 глубины хода сошников. Если величины сигналов на входах блока 6 сравнения равны (с учетом зоны нечувствительности , то это означает, что глубина хода сошников соответствует заданному значению. При этом на выходах блока 6 сравнения сигнал равен нулю При возникновении отклонений глубины хода сошников от заданного значения на одном из выходов (в зависимости от знака отклонения блока 6 сравнения появляется сигнал ошибки, величина которого пропорциональна значению отклонения.
Сигнал -ошибки поступает или на входы сумматоров 8 и 13 на Подъем блоков 9 и 11 управления или на входы сумматоров ТО и 12 на Опускание
Одновременно блоком 3 сравнения сравниваются сигналы с выходов, формирователей 2. Если они равны (сошни ковый вал расположен параллельно поверхности поля), то на выходах элемента блока 3 сравнения сигнал равен нулю. При несоответствии значений сигналов (вал расположен под углом к поверхности поля) на соответствующем выходе блока 3 сравнения (в зависимости от направления наклон вала) формируется сигнал ошибки, величина которого зависит от значения угла перекоса вала. Сигнал ошибки поступает или на вторые входы сумматоров 8 на Подъем блока 3 управления и 10 на Опускание бло- ка 11 или на вторые входы сумматоров 13 на Подъем блока 11 управления и 12 на Опускание блока 9 управления .
После арифметического суммировани в сумматорах 8,10,12 и 13 сигналы поступают на входы блоков 1 и 16 сравнения, которые осуществляют сравнение управляющих сигналов. В зависимости от результатов сравнения на выходе блоков 14 и 16 сравнения формируются соответствующие сигналы, которые поступают на электрогидравлические исполнительные механизмы 15 и 17, осуществляющие через рычажные системы 18 и 19 подъем или опускание вала подвески сошников 20.
Применение изобретения обеспечит стабилизацию глубины хода сошников и заделки семян в почву по всей ширине захвата сеялки даже в условиях ее использования для посева на склонах.
Формула изобретения
Устройство для регулирования глубины хода сошников сеялки, содержащее датчик глубины хода, соединеннь1й с формирователем импульсов, блок преобразования, включающий блок сравнения с задатчиком среднего значения глубины хода сошников, и блок управления, выполненный в виде электрогидравлического исполнительного механизма, который соединен со связанным с подвеской сошников рычажным механизмом, отличающееся тем, что, с целью повышения точности регулирования глубины .хода сошников при работе сеялки на склонах, оно снабжено дополнительным датчиком глубины хода с формирователем сигналов и дополнительным блоком управления, блок преобразования снабжен дополнительным блоком сравнения и вычислителем среднеарифметического значения, а основной и дополнительные блоки управления - сумматорами на Г1одъем, сумматорами на Опускание сошников и блоками сравнения управляющих сигналов, причем выходы формирователей подключены к входам дополнительного блока сравнения и вычислителя среднеарифметического, значения, выход которого подклю ен к блоку сравнения, при этом каждый из входов дополнительного блока сравнения подключен к сумматору на Подъем и сумматору на Опускание блоков управления, один из выходов блока сравнения соединен с сумматорами на Подъем, а другой - с сумматорами на Опускание блоков управления, причем выходы сумматоров на Подъем и на Опускание сошников электрически связаны через блоки сравнения управляющих сигналов с электрогидравлическими исполнительными механизмами, при этом последние через рычажную систему соединены с подвеской сошников.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 38377, кл. А 01 В 63/1П, 1975. 2. Автоматизация сельскохозяйственных агрегатов и их систем управления. Записки ЛСХИ, т.28, Л., 1975, с. прототип .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматической стабилизации заглубления сошников сеялки | 1980 |
|
SU934940A1 |
| Сеялка | 1990 |
|
SU1766298A1 |
| Устройство автоматического регулированияглубиНы ХОдА СОшНиКОВ | 1977 |
|
SU828999A1 |
| Устройство для контроля, учета и автоматического управления работой сеялки | 1988 |
|
SU1616531A1 |
| Механизм навески рабочих органов сеялки | 1990 |
|
SU1771396A3 |
| Механизм подвески сошника | 1977 |
|
SU634706A1 |
| Комбинированное орудие для предпосевной обработки почвы и посева | 1990 |
|
SU1794333A1 |
| Способ управления процессом навозоудаления в животноводческом помещении и устройство для его осуществления | 1987 |
|
SU1588339A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА СЕЛЬХОЗМАШИНЫ | 2011 |
|
RU2489832C1 |
| Сеялка | 1974 |
|
SU502622A1 |