(5) СТЕНД ДЛЯ ИСПЫТАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытания одноколейных транспортных средств | 1989 |
|
SU1672264A1 |
| Стенд для моделирования дорожных условий | 1987 |
|
SU1580208A1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2399538C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГУСЕНИЧНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2001 |
|
RU2194297C1 |
| Установка для испытаний промышленного трактора | 1990 |
|
SU1742665A1 |
| Транспортное средство | 2017 |
|
RU2645512C1 |
| Напольный малогабаритный стенд для исследования подвесок автомобилей | 2016 |
|
RU2629636C1 |
| Устройство для управления транспортным средством | 1983 |
|
SU1126931A1 |
| Стенд для испытания рессор | 1985 |
|
SU1286926A1 |
| ДВУХКОНСОЛЬНЫЙ ДОЖДЕВАЛЬНЫЙ АГРЕГАТ | 2002 |
|
RU2222184C2 |
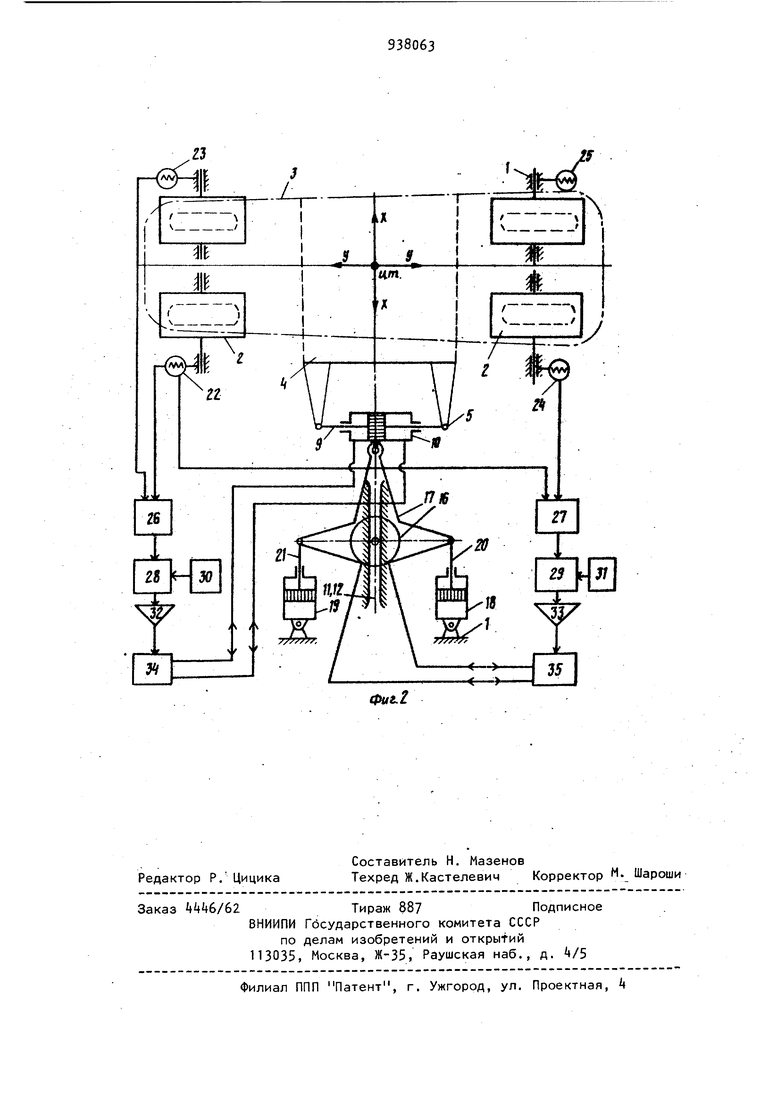
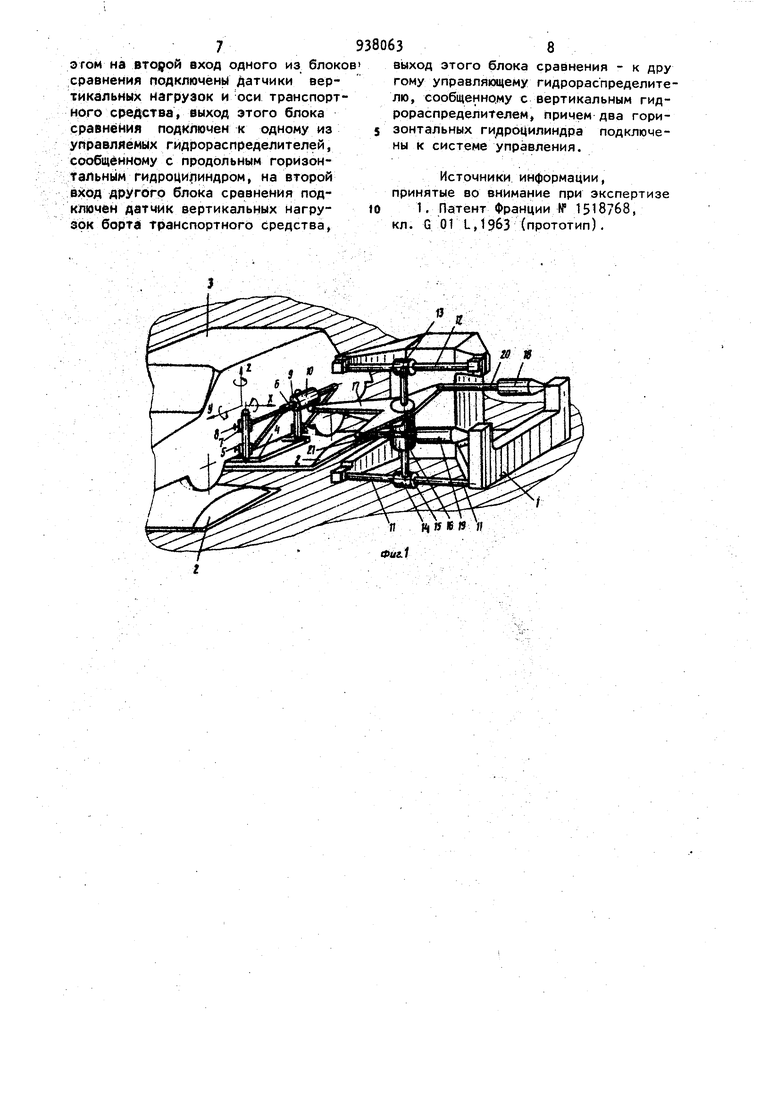
;. .,. Изобретение относится к транспорт ному машиностроению и может быть использовано при имитации динамическог перераспределения нагрузок по осям и бортам при движении транспортного средства-по дорогам с переменными продольным и поперечным уклонами. Известен стенд для испытания тран портных средств, содержащий основание, опорную поверхность для установки колес испытываемого транспортного средства, раму, прикрепленную к остову транспортного средства, нагру жающее устройство, связанное с рамой и систему управления нагружающим устройством DI. Недостатком известного является невозможность автоматической имитации динамического перераспределения вертикальных нагрузок между осями и бортами при движении транспортного I средства по дорогам с различными поперечными и продольными уклонами. Кроме того, известный стенд не позво ляет имитировать динамическое перераспределение при различной весовой загрузке транспортного средства. Цель изобретения - повышение точч ности имитации динамического перераспреде.пения вертикальных нагрузок между и бортами при-движении транспортного средства по дорогам с различными поперечными и продольными уклонами. Поставленная цель достигается тем, что нагружающее устройство оборудовано расположенным в горизонтальной плоскости -продольно оси испытыв.аемого транспортного средства гидроцилиндром, оба конца штока которого закреплены на втулках, размещенных с возможностью перемещения и фиксации на вертикальных стойках, закрепленных на раме, вертикальным гидроцилиндром, оба конца штока которого закреплены на дополнительных втулках, установленных с возможно- . стью перемещения по поперечным направляющим, закрепленным горизонтально на основании, двумя горизонтальными гидроцилиндрами, корпусы которых шарнирно установлены на основании, а штоки жестко соединены с корпусом вертикального гидроцилиндра через трехплечий рычаг, одно плечо которого шарнирно соединено с корпусом продольного горизонтальног гидроцилиндра, два других плеча - с штоками обоих горизонтальных гидроцилиндров, а система управления снабжена датчиками вертикальных наг рузок каждого борта и каждой осиi транспортного средства, блоками уп равления, задающими блоками, подклю ченными на один из входов блоков сравнения, и управляемыми гидрораспределителями, при этом на второй вход одного из блоков сравнения подключены датчики вертикальных наг рузок и оси транспортного средства выход этого блока сравнения подклю чен к одному из управляемых гидрораспределителей, сообщенному с продольным горизонтальным гидроцилиндром, на второй вход другого блока сравнения подключен датчик вертикальных нагрузок борта транспортного средства, выход этого блока сравнения - к другому управляющему гидр распределителю, сообщенному с вертикальным гидроцилиндром,причем два горизонтальных гидроцилиндра подключены к системе управления. На фиг. 1 изображен стенд, (с од ного борта транспортного средства), общий вид; на фиг. 2- структурная схема системы управления. На основании 1 смонтированы опорные поверхности, выполненные в виде беговых барабанов 2, на которых установлено испытываемое транспортное средство 3, к остову транспортного средства 3 прикреплена рама k с вертикальными стойками 5 и 6 с каждого борта транспортного средства, на которых установлены втулки 7. Втулки 7 имеют возможности перемещения по вертикальным стойкам и фиксируются на Них стопорами 8. На втулках 7 обоими концами закреплен шток 9 продольного горизонтального гидроцилиндра 10. На основании 1 закреплены поперечные горизонтальные направляющие 11 и 12 для дополнительных подвижных втулок 13 и 14, к которым прик34реплен шток 15 вертикального гидроцилиндра 16. С корпусом вертикального гидроцилиндра 16 жестко соединен трехплечий рычаг 17, одно плечо которого шарнирно соединено с корпусом продольного горизонтального гидроцилиндра 10. На основании 1 шарнирно установлены два поперечных горизонтальных гидроцилиндра 18 и 19, штоки 20 и 21 которых шарнирно соединены с другими плечами трехплечего рычага 17- На оси каждого бегового барабана 2 установлены датчики вертикальных усилий 22-25, при этом датчики 22 и 23 установлены на одной из осей транспортного средства, а датчики , 22 - с одного борта транспортного средства. Система управления включает датчики вертикальных нагрузок 22-25, сумматоры 2б и 27, блоки сравнения 28 и 29 / задающие блоки 30 и 31, усилители 32 и 33 и управляемые гидрораспределители 3 и 35. Для создания заданной общей вертикальной нагрузки транспортного средства на беговые барабаны 2 корпуса обоих вертикальных гидроцилиндров 16, расположенных по обеим бортам транспортного средства, с помощью управляемых гидрораспределителей З и 35 устанавливают на заданной одинаковой высоте относительно основания 1 .Для имитации перераспределения вертикальных нагрузок по бортам транспортного средства посредством задающего блока 31 устанавливают заданную нагрузку на один из бортов транспортного средства. Действительная вертикальная нагрузка, действующая на этот борт транспортного средства, равна сумме сигналов датчиков 22 и . С выхода сумматора 27 сигнал поступает на вход блока сравнения 29. При наличии разности между заданной вертикальной нагрузкой на указанный борт транспортного средства, установленной задающим блоком 31, и суммарным сигналом датчиков. 22 и 2k, на выходе блока сг эвнения 29 появляется сигнал, под действием которого управляемый гидрораспределитель 35 перемещает корпус вертикального гидроцилиндра 16 в соответствующем направлении. Перемещение корпуса вертикального гидроцилиндра 16 происходит до тех пор, пока не исчезает сигнал на выходе бпгжл сравнения 29. В этом случае вертикальная нагрузка, действующая на данный борт транспортного средства, равна заданной. Для имитации динамического перераспределения вертикальных нагрузок по бортам при движе нии транс портного средства по дороге с переменным поперечным уклоном с выхода задающего блока 31 подают на вход блока сравнения 29 сигнал, изменяющийся по времени по заданному закону. Для имитации перераспределения вер тикальных нагрузок по осям транспортного средства посредством задающего блока 30 устанавливают заданную нагру ку на одну из осей транспортного средства. Действительная вертикальная нагрузка, действующая на эту ось транспортного средства, равна сумме сигналов датчиков 22 и 23. С выхода сумматора 2б сигнал поступает на вход блока сравнения 28. При наличии разности между заданной вертикальной нагрузкой на ось транспортного сред.ства, установленной задающим блоком 30 и суммарным сигналом датчиков 22 и 23, на выходе блока сравнения 28 появляется сигнал, под действием которого управляемый гидрораспределител З переместит корпус продольного гори зонтального гидроцилиндра 10 в соответствующем направлении. Одновременно с помощью системы управления пере мещаются и штоки 20 и 21 поперечных горизонтальных- гидроцилиндров 18 и 19, что приводит к соответствующему п вороту трехплечего рычага 17 и его перемещению в поперечном направлении вдоль направляющих 11 и 12. Перемещение корпуса продольного горизонтально гидроцилиндра 10 и штоков 21 и 20 по перечных горизонтальных гидроцилиндро 18 и 19 происходит до тех пор, пока не исчезает сигнал на выходе блока сравнения 28. В этом случае вертикаль ная нагрузка, действующая на данную ось транспортного средства, равна заданной. Для имитации динамического перераспределения вертикальных нагрузок по осям при движении транспортного средства на дороге с переменным продольным уклоном с выхода задающего блока 30 на вход блока сравнения 28 подают сигнал, изменяющийся по времени по заданному закону. Таким образом, в предлагаемом стен де обеспечивается автоматическая имитация динамического перераспределения вертикальных нагрузок между бортами и осями при движении транспортно го средства по дороге с переменными продольными и поперечными уклонами. Кроме того, имитация динамического перераспределения осуществляется при различной общей нагрузке транспортного средства, что повышает точность имитации динамического перераспределения. Формула изобретения Стенд для испытания транспортных средств, содержащий основание, опорную поверхность для установки колес испытываемого транспортного средства, раму, прикрепленную к остову транспортного средства, нагружающее .устройство, связанное с рамой, и систему управления нагружающим устройством, отличающийся тем, что, с целью повышения точности имитации динамического перераспределения вертикальных нагрузок, между осями и бортами при движении транспортного средства по дорогам с раз-, личными поперечными ипродольными уклонами, нагружающее устройство обоРУДОвано расположенным в горизонтальНОИ плоскости продольно оси испытываемого транспортного средства .гиДроцилиндром, оба конца штока которого закреплены на втулках, размещенных с возможностью перемещения и фиксации на стойках, закрепленных на раме, вертикальным гидроцилиндром, оба конца штока кото рого закреплены на исполнительных втулках, установленнь1Х с возможностью перемещения по поперечным направляющим, закрепленным горизонтально на основании, двумя горизонтальными гидроцилиндрами, корпусы которых шарнирно установлены на основании, штокисоединены с корпусом вертикального гидроцилиндра через трехплечий рычаг, одно плечо которого шарнирно соединено с корпусом гидроцилиндра, два других плеча - со штоками обоих горизонтальных гидроцилиндров, а система управления снабжена датчиками вертикальных нагрузок каждого борта и каждой оси транспортного средства, блоками управления, задающими блоками, подключенными на один из входов блоков сравнения и управляемыми гидрораспределителямк., при
этом на второй вход одного из блоко сравнения подключены датчики вертикальных нагрузок и оси транспортного средства, выход этого блока сравнения подключен к одному из управляемых гидрораспределителей, сообщённому с продольным горизонтальным гидроци г|индром , на второй вход другого блока сравнения подключен датчик вертикальных Нагрузок бортй транспортного средства
выход этого блока сравнения - к дру гому управлякнцему гидрораспределителю, сообщенному с вертикальным гидрораспределителем, причем два горизонтальных гидроцилиндра подключены к системе управления.
Источники информации, принятые во внимание при экспертизе
