катная тележка, ходовая стойка, много-jj частотном и амплитудном диапазонах
опорная машина и т.п.) устанавливается каждым колесом на ролики 12 и 13 внешней 5 и внутренней 6 рам и фиксируется в продольном направлении шарнирными страховочными устройствами так, что каждая из нагружающих рам 5 и 6 несет осевую нагрузку, приходящуюся только на одно колесо или одно кинематическое звено подвески колесного хода.
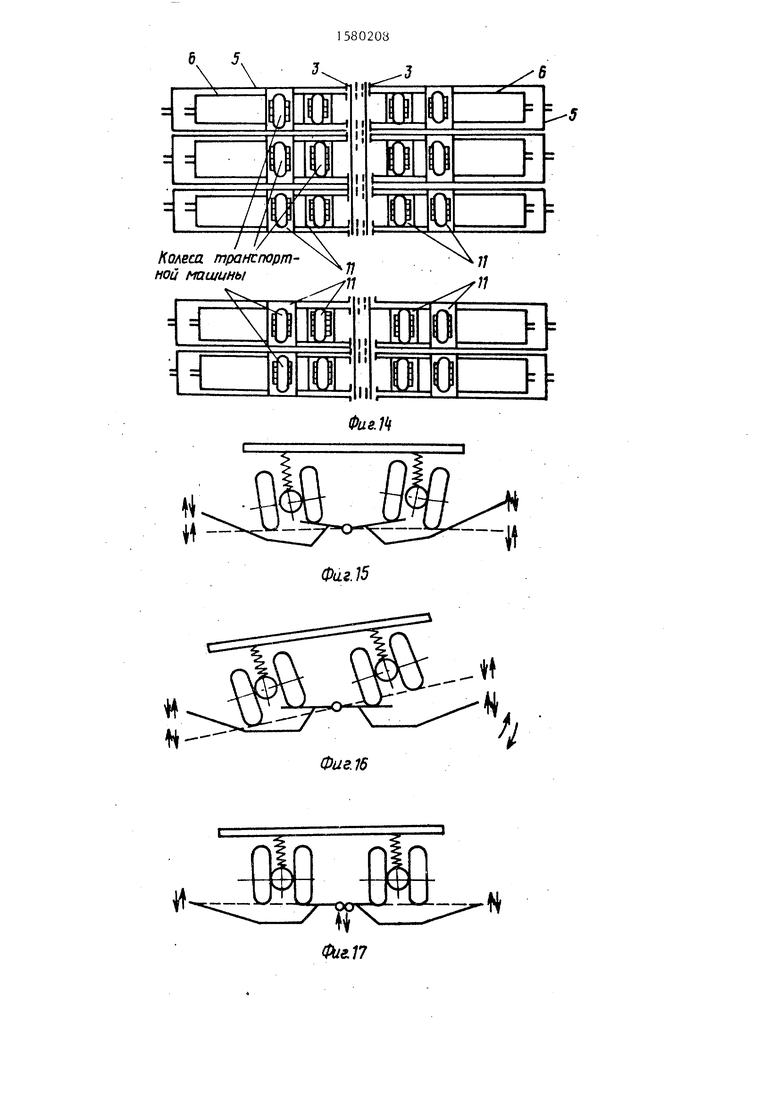
Количество нагружающих рам 5 и 6 с гидроцилиндрами 8 и 9 и их взаимное расположение выбираются и компа- нуются в зависимости от числа осей колесного хода и конструктивных особенностей испытываемой машины, которые по отношению к продольной оси рам 5 и 6 могут располагаться как в продольном, так и поперечном направлениях.
Испытания колесного хода проводятся для условий работы колес в ведущем и ведомом режимахо
При работе в ведущем режиме ролик 12 вращается свободно, а ролик 13 под действием вращающего момента колеса испытываемой машины передает вращение на редуктор 14 и далее черед муфту на гидромотор 15. Каждый гидромотор 15 имеет индивидуальную гидравлическую систему управления. Контроль и корректировка скорости вращения ролика 13 обеспечиваются датчиком скорости через усилитель, электромеханический преобразователь, сопло- заслонку и золотник 3. Гидравлическим приводом с гидромотором 15 создается сопротивление качению колеса, соответствующее определенному дорожному покрытию. При работе колеса испытываемой машины в ведомом режиме вращение колеса обеспечивается роликом 13, вращаемым через редуктор 14 гидромотором 15. Задание требуемой
20
25
30
цилиндры 8 и 9 выполнены с гидроста тическими уплотнениями. Колебания, соответствующие микропрофилю воздей ствия единичных наровностей различной длины и формы (макропрофиль), з даются изменением положения внутрен него цилиндра 26 относительно непод вижного цилиндра 25. Каждый из гидр цилиндров 8 и 9 имеет индивидуальны привод и систему управления. Задани требуемого режима колебаний нагружа щих рам 5 и 6 осуществляется через усилители и электромагнитный серво- клапан от коммутатора, к которому подключены гидроцилиндры 2,,8 и 9. Контроль требуемого режима колебани рам 5 и 6 и корректировка этого режима осуществляются датчиками перемещений, устанавливаемыми в зоне под каждым колесом испытуемой машины, и на штоке 27 гидроцилиндров 8 и 9. Задание требуемого режима колебаний производится от устройства 18 программного управления.через преобразо ватель 17 сигнал-код, генератор 16 регулирующих и управляющих сигналов коммутатор, усилитель и электромагнитный сервоклапан.
Имитация поперечного и продольног профиля дороги осуществляется за сче возможного подъема на заданную высоту и наклона одного из концов попе- . речной балки 3 посредством гидроци- линдров 2, а также подъема связанных со штоками гидроцилиндров 8 и 9 концов рам 5 и 6.
Гидроцилиндры 2 имеют индивидуаль ный привод и систему управления. Кон троль положения и корректирование по ее ложения балки 3, а также каждой из нагружающих рам 5 и 6 осуществляется датчиками положения.
При наличии многоосного транспорт ного средства достаточно просто соз-
40
45
50
j частотном и амплитудном диапазонах
0
5
0
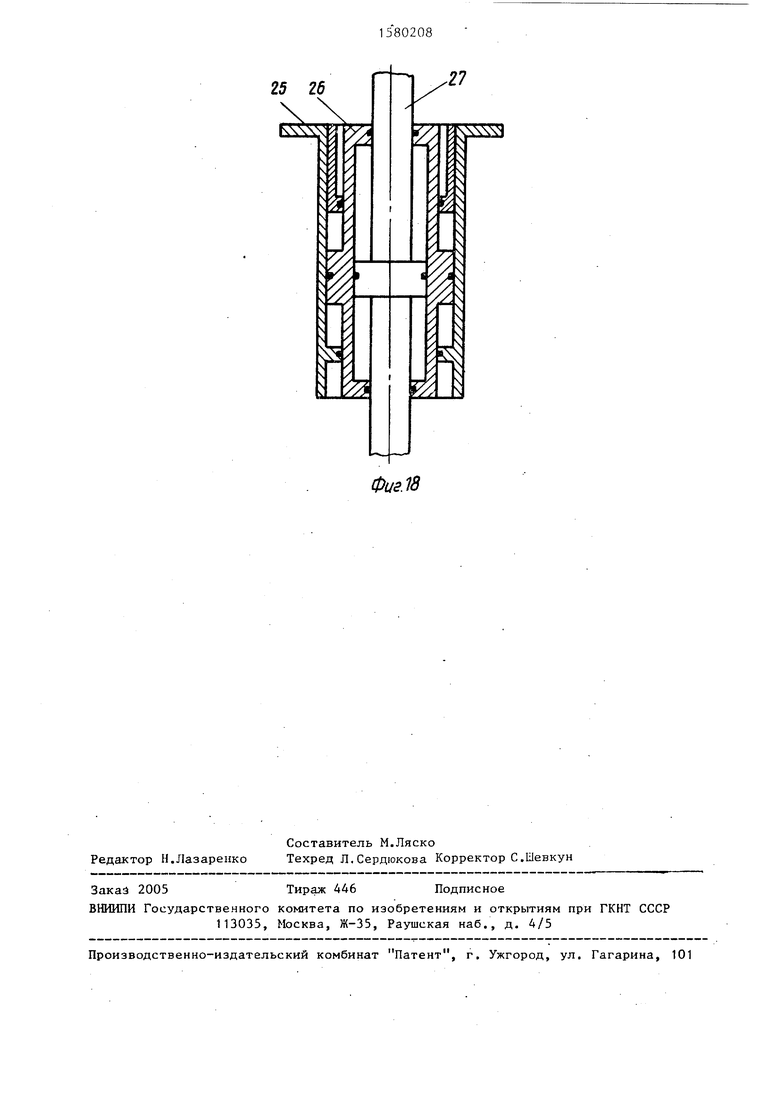
цилиндры 8 и 9 выполнены с гидростатическими уплотнениями. Колебания, соответствующие микропрофилю воздействия единичных наровностей различной длины и формы (макропрофиль), задаются изменением положения внутреннего цилиндра 26 относительно неподвижного цилиндра 25. Каждый из гидро- цилиндров 8 и 9 имеет индивидуальный привод и систему управления. Задание требуемого режима колебаний нагружающих рам 5 и 6 осуществляется через усилители и электромагнитный серво- клапан от коммутатора, к которому подключены гидроцилиндры 2,,8 и 9. Контроль требуемого режима колебаний рам 5 и 6 и корректировка этого режима осуществляются датчиками перемещений, устанавливаемыми в зоне под каждым колесом испытуемой машины, и на штоке 27 гидроцилиндров 8 и 9. Задание требуемого режима колебаний производится от устройства 18 программного управления.через преобразователь 17 сигнал-код, генератор 16 регулирующих и управляющих сигналов, коммутатор, усилитель и электромагнитный сервоклапан.
Имитация поперечного и продольного профиля дороги осуществляется за счет возможного подъема на заданную высоту и наклона одного из концов попе- .- речной балки 3 посредством гидроци- линдров 2, а также подъема связанных со штоками гидроцилиндров 8 и 9 концов рам 5 и 6.
Гидроцилиндры 2 имеют индивидуальный привод и систему управления. Контроль положения и корректирование по-. е ложения балки 3, а также каждой из нагружающих рам 5 и 6 осуществляется датчиками положения.
При наличии многоосного транспортного средства достаточно просто соз-
0
5
0
дается требуемый характер воздействия как на одну ось (одно колесо), так и на группу колес в любой последовательности или одновременно.
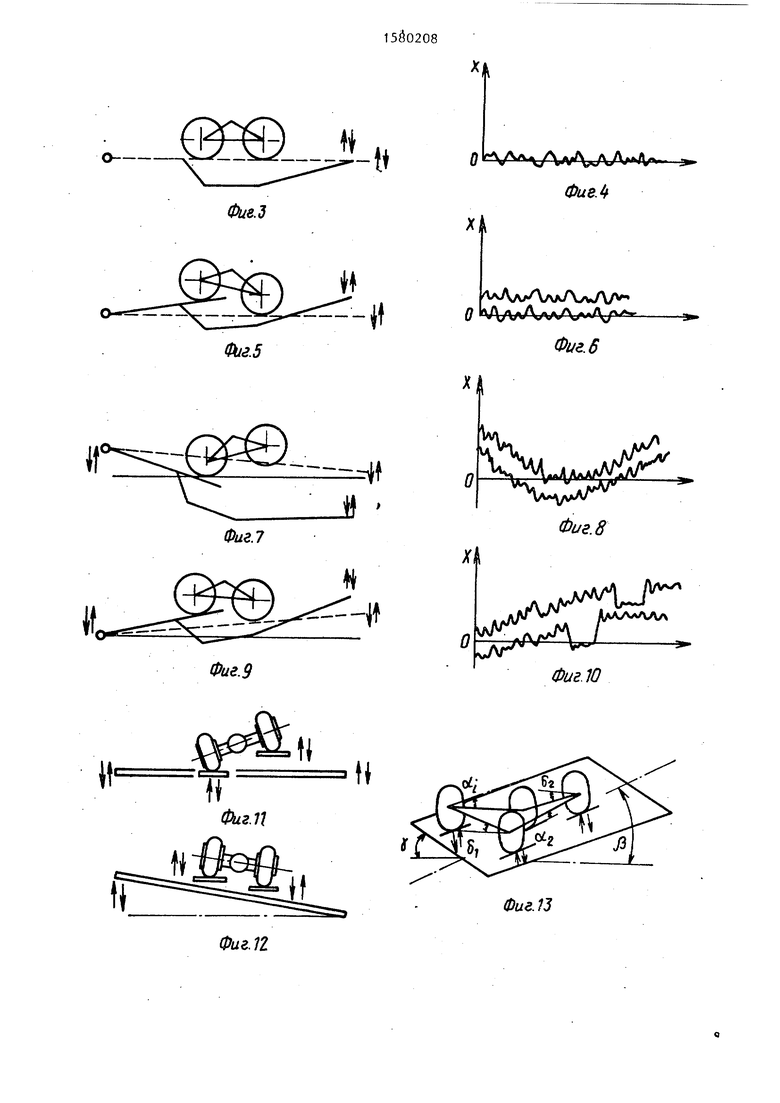
Предлагаемый стенд позволяет имитировать воздействие единичной или групповой неровностей на весь колесный ход, колеса одного борта или только одно колесо всего колесного хода; за- |Q давать воздействие неровности любого профиля, в том числе и случайный характер воздействия неровностей дорожного участка большой протяженности; имитировать движение по косогору и AO-JJ роге с уклоном; движение через траншеи и другие препятствия в виде оди - ночных неровностей.
Формула изобретения 20
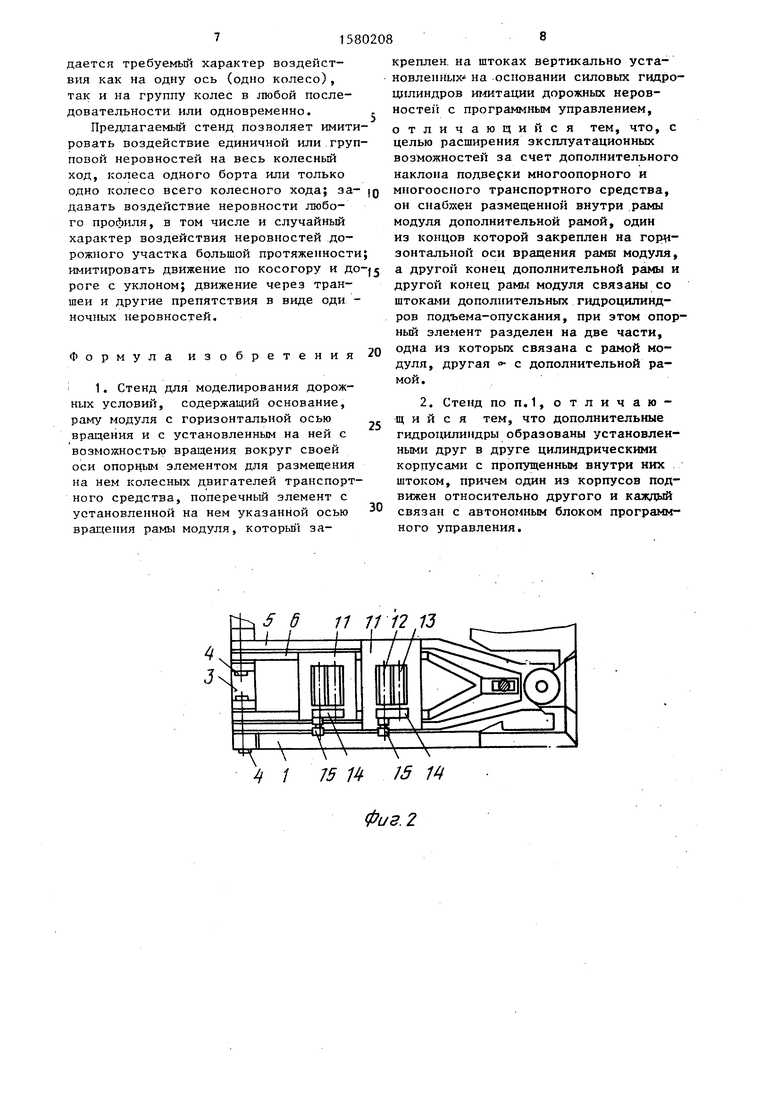
1. Стенд для моделирования дорожных условий, содержащий основание, раму модуля с горизонтальной осью вращения и с установленным на ней с возможностью вращения вокруг своей оси опорным элементом для размещения на нем колесных двигателей транспортного средства, поперечный элемент с установленной на нем указанной осью враценил рамы модуля, который заJ
0
5
0
креплен на штоках вертикально установленных на основании силовых гидроцилиндров имитации дорожных неровностей с программным управлением,
отличающийся тем, что, с целью расширения эксплуатационных возможностей за счет дополнительного наклона подвески многоопорного и многоосного транспортного средства, он снабжен размещенной внутри рамы модуля дополнительной рамой, один из концов которой закреплен на горизонтальной оси вращения рамвг модуля, а другой конец дополнительной рамы и другой конец рамы модуля связаны со штоками дополнительных гидроцилиндров подъема-опускания, при этом опорный элемент разделен на две части, одна из которых связана с рамой модуля, другая с дополнительной рамой.
2. Стенд поп.1, отличающийся тем, что дополнительные гидроцилиндры образованы установленными друг в друге цилиндрическими корпусами с пропущенным внутри них штоком, причем один из корпусов подвижен относительно другого и каждый связан с автономным блоком программного управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ ПЛАВНОСТИ КОЛЁСНОГО МНОГООСНОГО ШАССИ | 2014 |
|
RU2567978C1 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| Стенд для испытания транспортных средств | 1981 |
|
SU1004802A1 |
| Стенд для испытания транспортных средств | 1989 |
|
SU1679241A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ НЕСУЩЕЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2075743C1 |
| Стенд для испытания самоходных корнеклубнеуборочных машин и имитатор нагрузок на копатели корнеклубнеуборочных машин | 1982 |
|
SU1092370A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЙ КОЛЁС И ПОДВЕСОК МОБИЛЬНЫХ РОБОТОВ | 2020 |
|
RU2778737C2 |
| УКЛАДЧИК ДОРОЖНО-СТРОИТЕЛЬНЫХ МАТЕРИАЛОВ | 1993 |
|
RU2076167C1 |
| Стенд для испытания одноколейных транспортных средств | 1989 |
|
SU1672264A1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ВАЛОПРОВОДА И НЕСУЩИХ СИСТЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2279655C1 |
Изобретение относится к транспортному машиностроению и может быть использовано для ресурсных испытаний колесных машин. Цель - расширение эксплуатационных возможностей за счет дополнительного наклона подвески многоопорного и многоосного транспортного средства. Стенд содержит основание 1 с установленными на нем опорными элементами - роликами 12 и 13 для движителей колесного хода испытуемых машин, приводную систему 14 и 15 опорных элементов и имитаторы дорожных условий, снабженные шарнирно установленной на одном конце основания на вертикальных гидроцилиндрах 2 поперечной балкой 3 и закрепленными на ней одними концами посредством оси 4 внутренней 5 и внешней 6 нагружающими рамами для размещения опорных элементов и силовыми цилиндрами 8 и 9 с программным управлением, шарнирно связанными с вторыми концами рам 5 и 6 с возможностью придания им возвратно-поступательных случайных колебаний. При этом каждый опорный элемент имеет автономный привод. 1 з.п. ф-лы, 18 ил.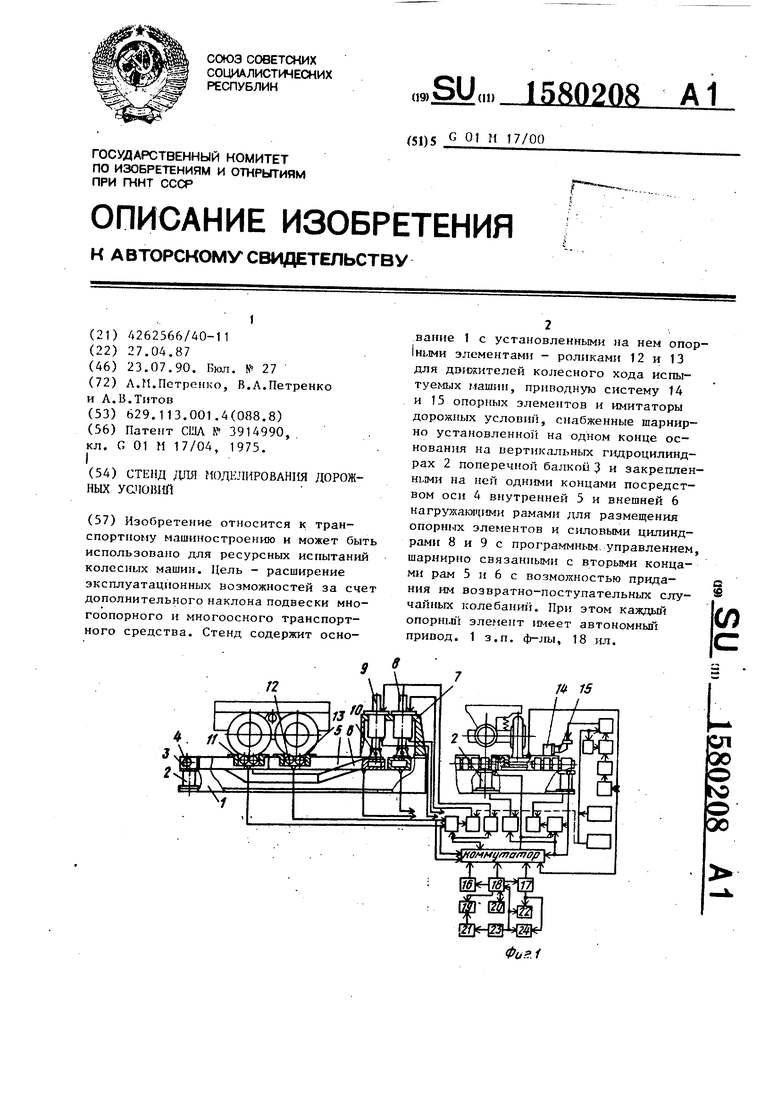
6 11 11 12 13
75 14 15
Физ.2
хл/-ЛГ
8 глф
VA V vx/Vig
U
П
$
6 Мф
Ј-глф
JT
z
olt
5
t} Al -Чо
ft
Л
I
7
TfT
Колеса транспорт- - ной машиныJL
Фи.г.Щ
Фаг. 15
Фиг. ;5
D
I
0
Л
Фиг. 18
| Патент США К 3914990, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| I | |||
