(54) МЕХАНИЧЕСКИЙ ПРИЕМНИК ПЕРЕНОСНОГО, ДЛИННОПЕРИОДНОЮ СЕЙСМОГРАФА, В ЧАСТНОСТИ ВЕРТИКАЛЬНОГО СЕЙСМОГРАФА Изобретение относится к длинноперио ным и широкополосным сейсмометрам и может быть применено как на сейсмических станциях, так и во временных изме рительных пу 1ктах вне станций, в сейсм ческих районах, в зданиях, подвергающихся опасности сотрясения, в шахтах, в скважинах и в воде. Механические приемники сейсмографов, в частности длиннопериодных сейсм графов с периодом колебания (собственный период) Т 5- 10 с, для полного учета, всего спектра сейсмических волн пред ставляют собой чувствительные колебательные конструкции с незначительными внутренними силами возврата упругих связей для получения больших собственных периодов Т и с максимальной чувствительностью перемещений в одном направлении. Данные устройства вследствие их большой чувствительности к различного рода сотрясениям нуждаются в дополнительных предохранителях (арретирах), заищщакшхих их от поломок прт транспортировке. Однако данными арретирами обычно нельзя управлять дистанционно. Это серьезный недостаток в случа л когда сейсмограф надо привести в действие или вывести из действия посредством дистанционного управления, как например, в скважинах или в сейсмических районах. Известны решения для шарниров листовой рессоры в механическом приемнике сейсмографа, - которые позволяют защищать механическую систему по крайней мере от разложения на свои составные части к ограничивать нагрузки листовой рессоры. Такпе решения заключаются в том, что все шарниры, служащие как упру гке соединительные связи в механическом приемнике сейсмографа, располагаются попарно, а шарниры, оснащенные листовыми рессорами, выполняются закрытыми . В последних подвижная внутренняя часть плотно окружена соответствующей неподвижной по отношению к ней
частью таким образом, чрго задана только та свобода Контакга между внут юнйей и йнешней частями шарнира, которая необходима аля максимального движения под вески относительно корпуса мехашческого прнемникЪ.
Однако это не устраняет все нежелательные сотрясения, которые приводят к разрушению сейсмографа при транспортировке при установке и при автомагическо вводе в эксплуатЕщито, кроме того он не сшсташшонно-управляемого арретира.
Цель изобретения-создать переносной сейсмограф, который позволяет широкополесную регистрацию землетрясений внутрк и вне сейсмических станций в любых измерительных пунктах как дополнение и расширение наблюдений на станциях. Тем самым, изобретение пресждует цель расидарить неполную сетку станций небольшим затратами и делать регистраш1И в измерительных пунктах, в зданиях, в шахтах, в сейсмических зонах и т.п., где невозможно или слишком затруднительно установить постоянные сейсмографы, подобные работающим на станциях.
В основу изобретения была положена задача создать механический приемник длиннопериодного сейсмографа переносноГо типа, которому не присущи недостатки общеизвестных конструкций сейсмографш. Он должен быть нечувствительным к сотрясениям при транспортировке и при установке, с обеспечением возможности дистанционного управления арретиром.
Согласно изобретению эта задача решается таким образом, что корпус изготов вляется в виде компактного тела с выемкой для подвески.
В дальнейшем эту выемку называем окном движения. Оно допускает колебание подвески без трения около ее оси вращения до достижения максимальных амплитуд, соответствующих требованиям экспери мент а.
При достижении максимального отклонения подвески прилегает к граням окна движения, которью имеют такую же форму, как обращенная к ним грань подвески.
Арретнрование поцвески в корпусе производится следутоошм образом.
Окно движения для подвески в корпусе закрывается постепенно арретиром, пока попвеска с одаой стороны не коснется гранит окна движения, а с другой сто роны не приляжет также плотно к арретиру, причем тот имеет такую же форму, как прилегаюдая к нему сторона подвески При арретировании он пшорачивается, причем ось вращения совпадает с осью вращения подвески. Такой вид арретира, ра ботающего по принципу закрытия окна двджения, можно также встроить в горизонтальные сейсмографы. Необходимая для арретирования сила создается известным способом при помаш.и мотора и передаточного механизма.
Ось вращения подвески в корпусе об- раегуется парным шарниром, причем , листовые рессоры образуют связь между корпусом и подвеской. Подвеска связывается с корпусом еще парой идентичных цополнительных деталей, которые расположены по направлению, совпааающе 1у с лзшией связи середин парного шарнира из листовых рессор. Связь кснцов цополнительных деталей с корпусом позволяет их кручение, обе дополнительные детали прецпочтительно идентичны.
В механическом npHeNoraKe цлиннопериодного сейсмографа маятникового типа, прецпочтительно вертикального сейсмографа с поднятой относительно горизонтали подвеской, имеется для достижения требуемого равновесного положения подвески относительно корпуса вин- тсвая пружина растяжения, которая прикреплена внизу у корпуса парой ;кгких, по сравнению с массой винтовой пру ки11Ы дополнительных деталей. Верхний конец пружины подвешен у корпуса такой же легкой дополнительной деталью. Дополнительные детали изменяемы по длине и имеют предпочтительно круглое сечение, пружина расположена в одной части окна цшжешш .
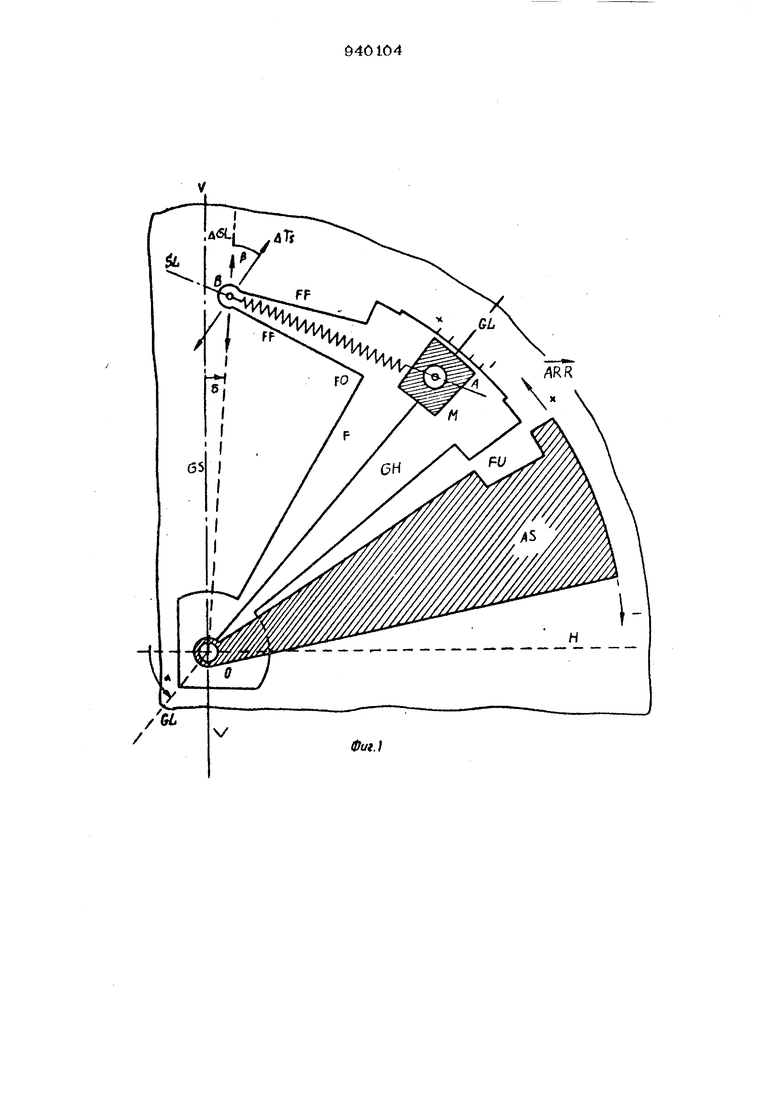
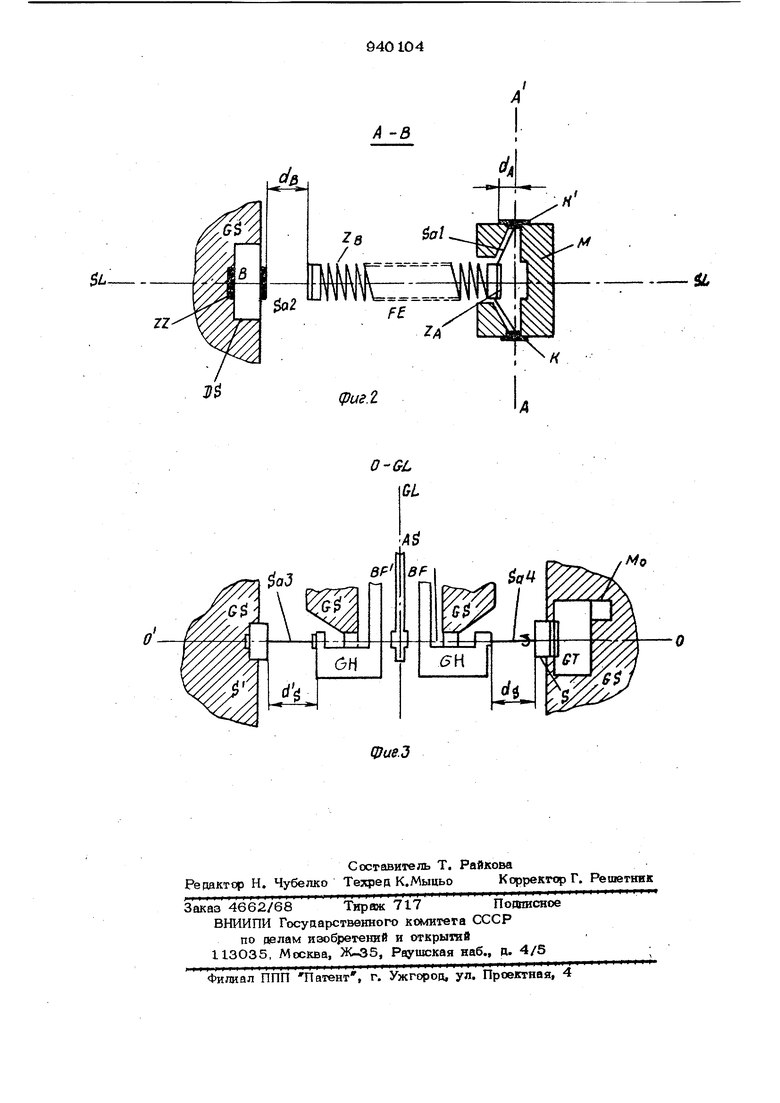
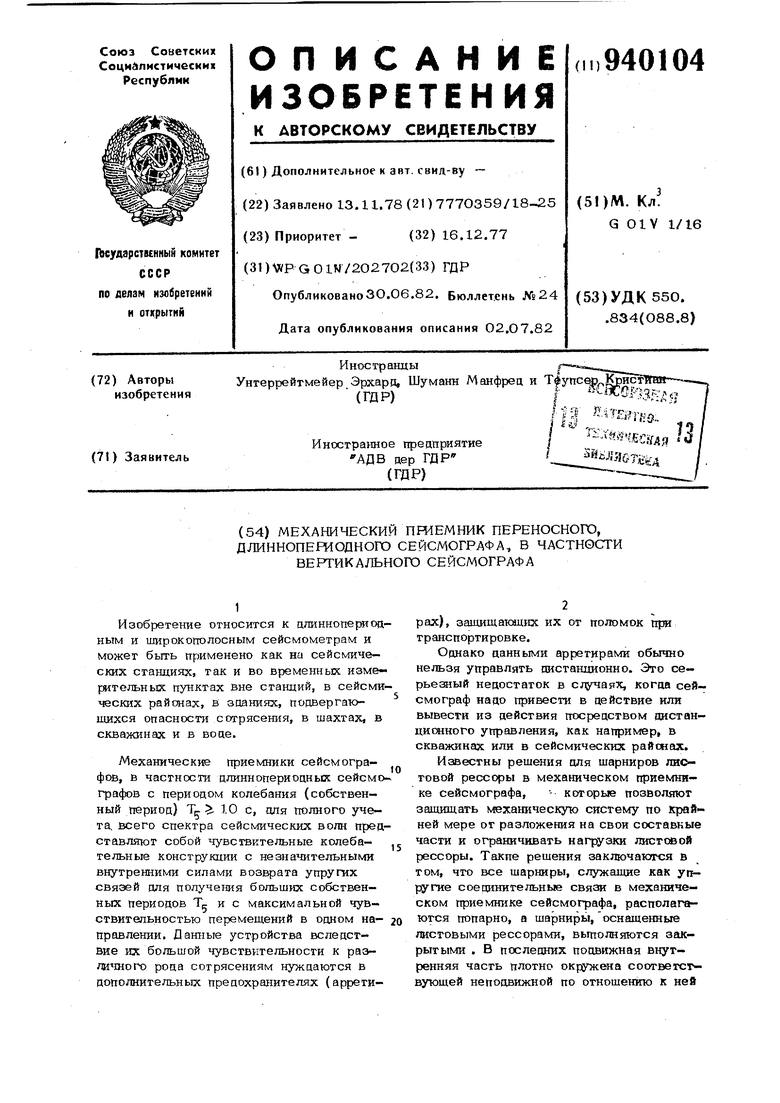
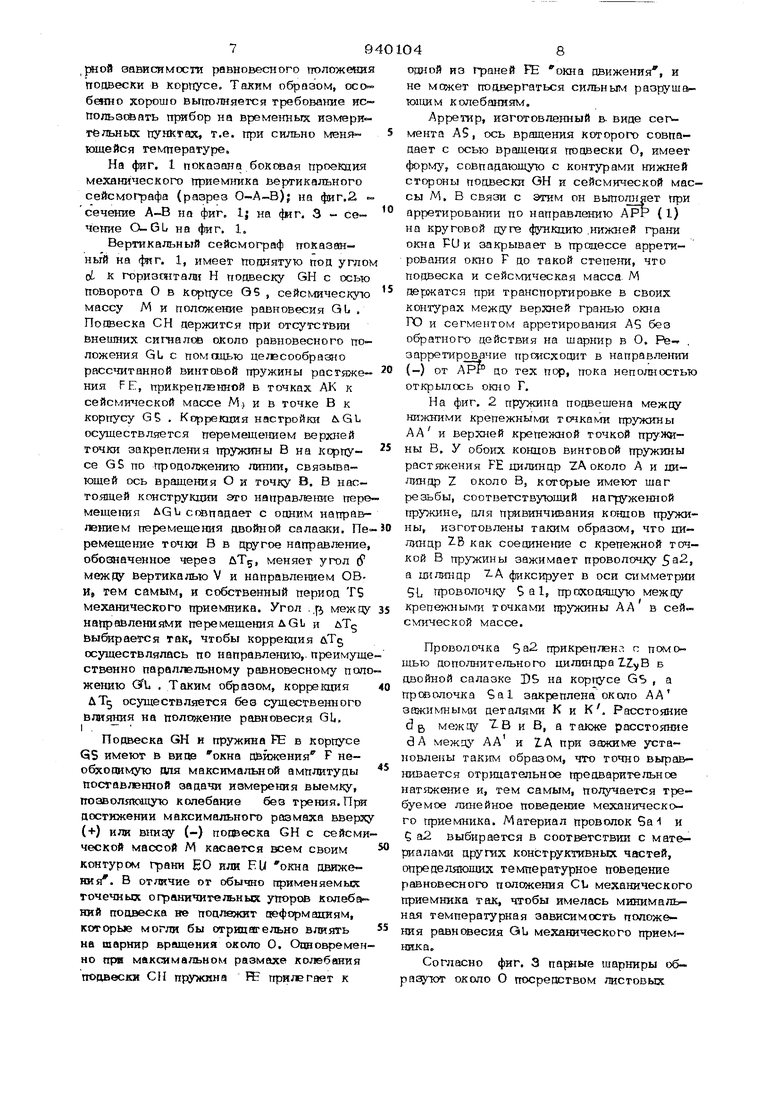
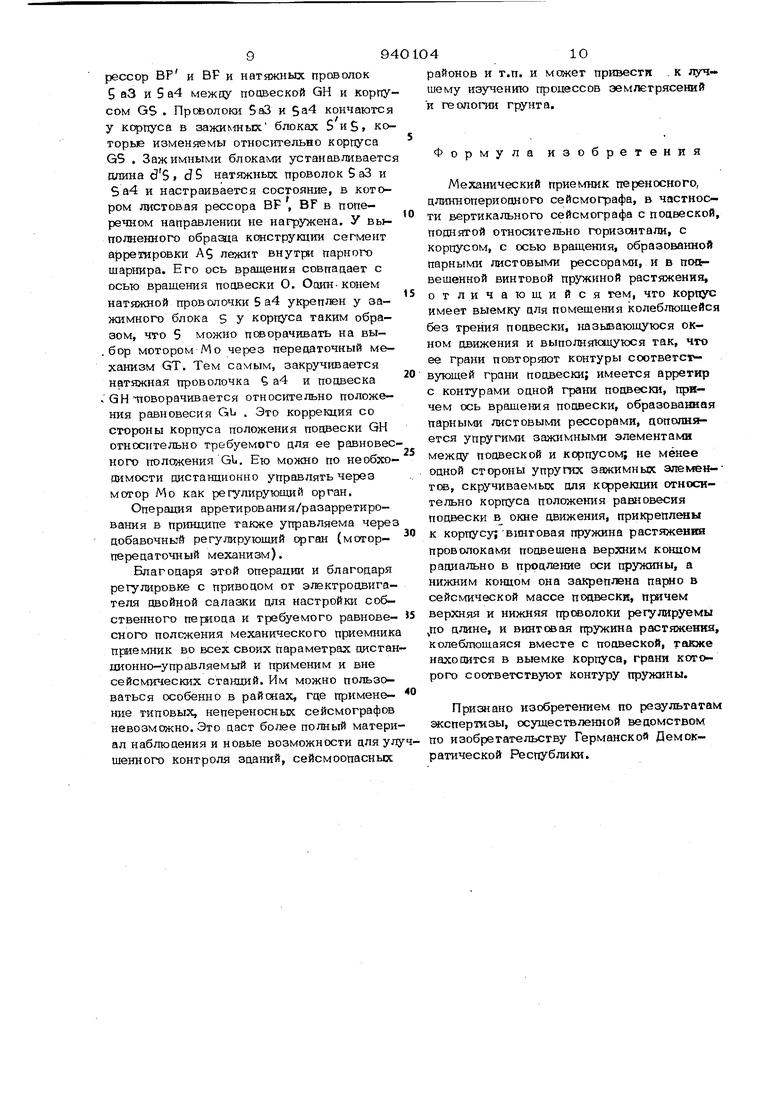
Верхняя дополнительная деталь закреплена у корпуса на так называемых двойных салазках, так что точку закрепления дополнительной детали пружины можно перемещать в двух направлениях, перпендикулярньк оси вращения поцвески в корпусе. Предпочтительно одно направление перемещения является приблизительно вертикальным (параллельно вектору силы тяжести.), а другое направление перемещения приблизительно параллельно плоскости, определенной осью вращения маятника и точками закрепления парных дополнительных деталей на подвеске. В режиме описанного выше в статическом состоянии механического приемника существуют два различных динамических состояния. 59 Первое состояние - состояние транспортировки, которое отличается сильной продолжительной, частично периодической нагрузкой меха1шческого приемника по всем направлениям, В этом состоянии окно цвижения подвески в корпусе закрыто, т.е. подвеска прилегает с одной стороны к контуру оконного ребра корпуса, а с противоположной сторсны она касается своим кштуром арретира. При этом нажимом арретира со стороны корпуса на одну сторону подвески окно движения закры вается и подвеска в этом состоянии окружена ее всех сторон частями корпуса таким образом, что она может даже при сильных сотрясениях во время транспортировки двигаться относительно кор- tiyca только на минимальную величину. Такое движение не в состоянии разрушат упругие связи подвески с корпусом, тем самым обеспечивается полное функционирование сейсмографа после разарретиро вания, т.е. после открытия ою1а движения. Разрушение упругих связей, кроме того, станет невозможным благодаря тому, чго дополнительные детали в шарнире вращения подвески во всех случаях упруг противодействуют нагрузочным силам, ко торые в обычном случае ведут к разруще нию листовых рессор. В особенности влияют сильные сдвиговые и крутильные движения подвески относительно корпуса. Они нагружают листовые рессоры перпендикулярно направлению действующей на них растягивающей нагрузки. После арретирования винтовая пружина растяжения прилегает также с одной стороны к одной грани окна движения. Благодаря ее связи с подвеской это препятствует формированию опасных коле бательных состояний винтовой пружины растакения при сильных сотрясениях во время транспортировки и обеспечивает благодаря креплению пружины дополнительными деталями, парно прикрепленным к подвеске, полное функционирование винтовой пружины растяжения, а в особеннос ти функционирование механического прием ника после разарретирования. Во втором состоянии, в состоянии измерения, арретир удален от подвески таким образом, что она вместе с винтовой проокиной растяжения может свободно без трения .колебаться: в окне движения ко пуса: т.е. подвеска является требуемым чувствительным приемником для сейсмических измерений. Колебание является 046 свободным, пока поцвеска не касается граней окна движения . При этом получается, что эти состояния могут попеременно повторяться любое число раз, та- КИМ образом, и сильные внешние нагрузки могут воздействовать во время измерительного процесса, поскольку форма грешей окна согласно изобретению соответствует контурам подвески. Такие состояния не представляют собой опасности для функционирования механического приемника. Это позволяет эксплуатацию и в невыгодных условиях вне сейсмических станций, что и требовалось. Подвешивание винтовой пружины pacTsfжения с помощью дополнительных деталей вышеописанным способом позволяет уменьшить массу пружины и ее закрепления, так что получается большое отношение массы подвески к массе пружины и ее закрепления. Отсюда вытекает, что характеристики построенного по таким . принципам механического приемника очень близки к общим теоретическим требованиям, поэтому имеется у/: чшенная линейность собственного периода Т в зависимости от положения подвески в Окне овижения. Использование дополнительных деталей в конструкции шарнира вращения поцвескк и их изготовление, позволяющее кручение их концов, обращенных к корпусу, имеет следукнцее преимущество: возможна преЩ1зионная коррекция положения поцвескн в окне ав жения кручением одной или обеих дополнительных деталей в шарнире подвески с их концов, прикрепленных к корпусу. В связи с этим отпадает необходимость устройства прецизионной коррекш1и положения подвески па самой посевеске электрических кроссовых проводов с корпуса на подвеску, которые ненадежны и ухудшают качество регистрации измеряемых величин. Добавочный полоидагельный эффект достигается предпочтительным закреплением концов дополнительных деталей у подвески и корпуса электрически непроводдщим образом. В связи с этим отпадает необходимость в ненадежных и уяуишакяцих качество кроссовых пр1жодах с Корпуса на подвеску для подключения обычной демпферной катушки. Кроме того, шарнир, согласно изобретению, позволяет соотвегсгвукшим ыборам температурного коэффициента дополнительных деталей провести прениаиснную коррекцию отстающей температуареной зависимости райновесного гголожения подвески в корпусе. Таким образом, ссо° беяно хорошо выполняется требоватгае исПользсеагь прибор на временных измеригбльньсх пунктах, т.е. при сильно меня ющейся температуре. На фиг, 1 показана бокшая проекиия механического приемника вертикального сейсмографа (разрез О-А-B)j на фиг.2, сечение А-В на фиг. Ij на фиг. 3 - сечение O-GL на фиг. I. Вертикальный сейсмограф показанный на фйГ. 1, имеет поднятую под углом ci к горизс 1гали Н подаеску GH с осью поворота О в ксрпусе QS , сейсмическую массу М и положение равновесия QI. . Подвеска СН держится при отсутствии внешних сигналсй около равновесного положения 3L с помоцью це;ксообраано рассчитанной винтовой пружины рос тяжеНИН FE, прикрепленной в точках АК к сейсмической массе М) и в точке В к корпусу G5 , Коррекция настройки Д-вЬ осуществляется перемещегшем верхней точки закрепления пружины В на корпусе GS по продолжению линии, связывающей ось вращения О и точку В. В насто5Ш1ей конструкции это направление пере мешения AGlj совпадает с одним направлением перемещения двойной салазки. Пе ремещение точки В в другое направление, обозначенное через йТ5, меняет угол б меж вертикалью V и направлением ОБи тем самым, и собственный период TS механического приемника. Угол ,.р, межру направлениями перемещения AGL и лТ Выбирается гак, чтобы коррекция лТ осуществлялась по направлению,, преимуще ственно параллельному равновесному поло жению . Таким образом, коррекция ЛТ осуществляется без существезшого влияния на положение равновесия ОЬ. I . Подвеска GH и пружина FE в корпусе QS имеют в виде окна движения F необходимую для максимальной амплитуды поставленной задачи измерения выемку, позволякицую колебание без трения. При достижении максимального размаха вверйу (+) или внизу (-) подвеска GH с сейсми ческой массой М касается всем своим контуром грани ЕО или EU окна движения. В отличие от обычно применяемых точечных ограничительных упоров колебаний подвеска не подлежит цефцэмациям, которые могли бы отрицевгельно влиять на шарнир вреицения около О, OuBOBpeMeri но при максимальном размахе колебания подвески СМ пружина FB tфи кгaeт к 48 одной из граней Ш окна движения, и не может подвергаться сильным разрушающим Колебаниям. Арретир, изготовленный в виде сепмента AS, ось вращения которого совпадает с осью вращения посшески О, имеет форму, совпадающую с контурами нижней стороны подвески GH и сейсмической массы М. В связи с Этим он выполняет при арретировании по направлению АРР (1) на круговой дуге функцию ,нижней грани окна FU и закрывает в процессе арретирования окно F до такой степени, что подвеска и сейсмическая масса, М держатся при транспортировке в своих контурах между верхней гранью окна ГО и сегментом арретирования А без обратного действия на шарнир в О. Ре-г , зарретирование прсисходит в направлении (-) от АРР до тех пор, пока неполностью открылось окно Г. На фиг. 2 пружина подвешена между нижними Крепежными точками пружины АА и верхней крепежной точкой пружины В. У обоих концов винтовой пружины растяжения FE цилиндр ZA около А и цилиндр Z около В, которые имеют шаг резьбы, соответствующий нагруженной пружине, для привинчивания концов пружины, изготовлены таким образом, что цилиндр В как сое дине fme с крепежной точкой В пружины зажимает проволочку , а цилиндр Z-A фиксирует в оси симметрии 5L проволочку Sal, проходящую между Крепежными точками пружины А А в сейсмической массе. Проволочка 5а прикреплена п помощью дополнительного цилиндра Б двойной салазке DS на корпусе GS , а прсеолочка Sal закреплена около АА зажи шыми деталями К и К . Расстояние d в межпу Z-B и В, а также расстояние в А АА и 2.А при зажиме установлены таким образом, что точно выравнивается отрицательное предварительное натяже1ше и, тем самым, получается требуемое линейное поведение механического гтриемника. Материал проволок 5а-1 и а2 выбирается в соответствии с материалакж других конструктивных частей, определяющих температурное поведение равновесного положения СЬ механического приемника так, чтобы имелась минимальная температурная зависимость положения равновесия GiL механического приемника. Согласно фиг. 3 парные шарниры образуют около О посредством листовых рессор ВР и BF и натяжных проволок 9 аЗ и 5 а4 межпу поа;веской QH и корпу сом GS . Проволоки 5аЗ и кончаются у корпуса в зажимных блоках 5 и, которые изменяемы относительно корпуса GS . Зажимными блоками устанавливаетс длина dS dS натяжных проволок S аЗ и S а4 и настраивается состояние, в котором листовая рессора BF , BF в поперечном направлении не нагружена, У выполненного обраэда конструкции сегмент арретировки А9 лежит внутри парного шарнира. Его ось вращения совпадает с осью вращения подвески О. Оцин-конем натяжной проволочки 5 а4 укреплен у зажимного блока S У корпуса таким образом, что 5 можно поворачивать на вы. бор мотором М о через передаточный механизм GT, Тем самым, закручивается натяжная проволочка Q а4 и подвеска QH поворачивается относительно положения равновесия Gb , Это коррекция со стороны корпуса положения подвески GH относительно требуемого для ее равновес ного полс жения GU, Ею можно по необходимости дистандионно управлять через мотор Мо как регулирующий орган. Операция арретирования/разарретирования в принципе также управляема через добавочный регулирующий орган (моторпереда точн ый механи зм). Благодаря этой операции и благодаря регулировке с приводом от электродвигателя двойной салазки для настройки собственного периода и требуемого равновесного положения механического приемник приемник во всех своих параметрах дистан ционно-управляемый и применим и вне сейсмических станций. Им можно пользоваться особенно в райснах, где применение типовых, непереносньк сейсмографов невозможно. Это даст более полный матери ал наблюдения и новые возможности для ул шенного контроля зданий, сейсмоопасных районов и т.п. и может привести . к лучшему изучению процессов землетрясений и геологии грунта. Формула изобретения Механический приемник переносного, длиннопериодного сейсмографа, в частности вертикального сейсмографа с подвеской, поднятой относительно горизонтали, с корпусом, с осью вращения, образованной парными листовыми рессорами, и в попгвешенной винтовой пружиной растяжения, отличающийся тем, что корпус имеет выемку для помещения колеблющейся без трения подвески, называющуюся окном движения и выполняющуюся так, нго ее грани повторяют контуры соответс вующей грани подвески; имеется арретир с контурами одной грани подвески, прячем ось вращения поцвески, образованная парными листовыми рессорами, дополняется упругими зажимными элементами между подвеской и корпусом; не менее одной стороны упругих зажимных элементов, скручиваемых для коррекции относительно корпуса положения равновесия подвески в окне движения, прикреплены к корпусу; В1штовая пружина растяженш проволоками подвешена верхним концом радиально в продление оси пружины, а нижним концом она за1феплена парно в сейсмической массе подвески, причем верхняя и нижняя проволоки регулируемы по длине, и винтовая пружина растяжения, колеблющаяся вместе с подвеской, также находится в выемке корпуса, грани которого соответствуют контуру пружины. Признано изобретением по результатам экспертизы, осуществленной ведомством по изобретательству Германской Демократической Республики.
eL.
A -В
| название | год | авторы | номер документа |
|---|---|---|---|
| СЕЙСМОГРАФ | 1991 |
|
RU2030767C1 |
| Горизонтальный сейсмограф направлений | 1934 |
|
SU49312A1 |
| Устройство для динамического исследования сейсмографон | 1937 |
|
SU51533A1 |
| Сейсмограф | 1979 |
|
SU789961A1 |
| Сейсмограф | 1933 |
|
SU32174A1 |
| Сейсмограф | 1980 |
|
SU890311A1 |
| Устройство для калибровки сейсмографов | 1979 |
|
SU857894A1 |
| ДВУХКООРДИНАТНЫЙ СТРУННЫЙ НАКЛОНОМЕР | 2004 |
|
RU2287777C2 |
| Длиннопериодный горизонтальный сейсмометр | 1978 |
|
SU673948A1 |
| Арретирующее устройство | 1980 |
|
SU900115A1 |