{54) ДАТЧИК ПОЛОЖЕНИЯ РОТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик положения ротора биротативного вентильного электродвигателя | 1982 |
|
SU1035743A1 |
| Сверхпроводниковая индукторная электрическая машина с комбинированным возбуждением | 2018 |
|
RU2696090C2 |
| МАГНИТНЫЙ РЕДУКТОР | 2015 |
|
RU2594018C1 |
| 00?СОЮЗНАЯ | 1973 |
|
SU370451A1 |
| ТОРЦЕВАЯ БЕСКОНТАКТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1992 |
|
RU2076434C1 |
| БЕСКОНТАКТНЫЙ СИНХРОННЫЙ ГЕНЕРАТОР | 1968 |
|
SU206695A1 |
| Бесконтактный электродвигательпостоянного тока | 1973 |
|
SU509955A1 |
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2634366C2 |
| Ротор электрической машины | 1983 |
|
SU1098070A1 |
| Бесконтактный переключатель | 1977 |
|
SU636717A1 |
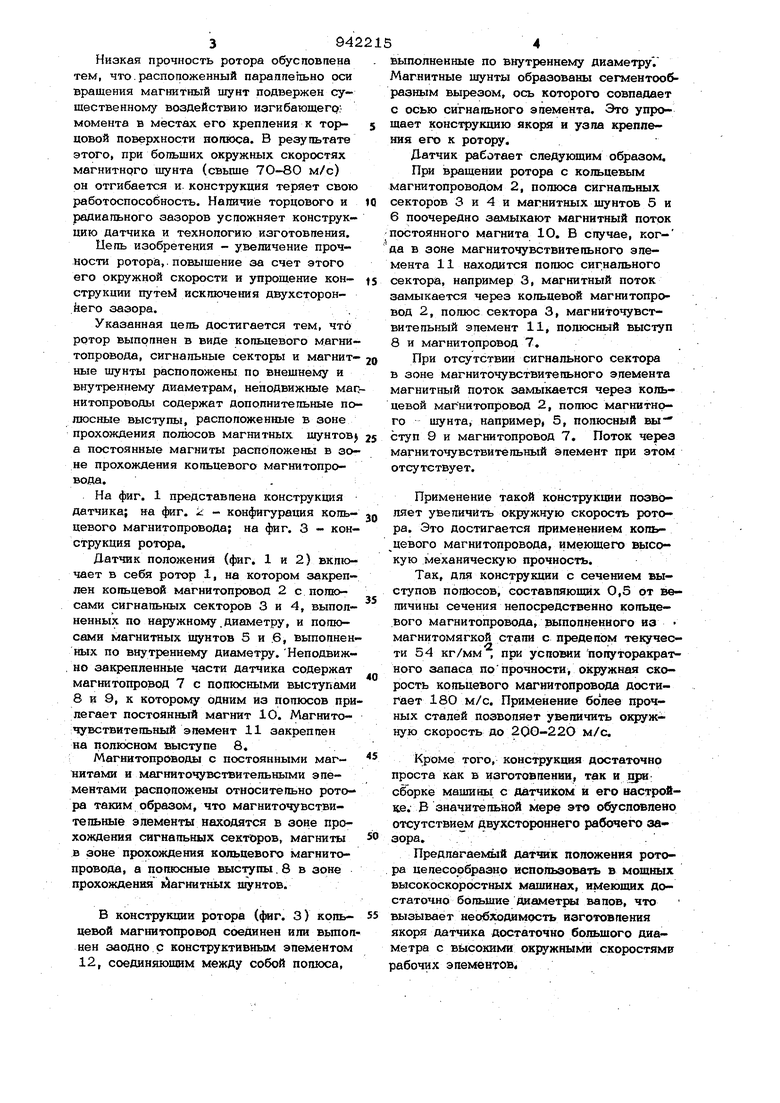
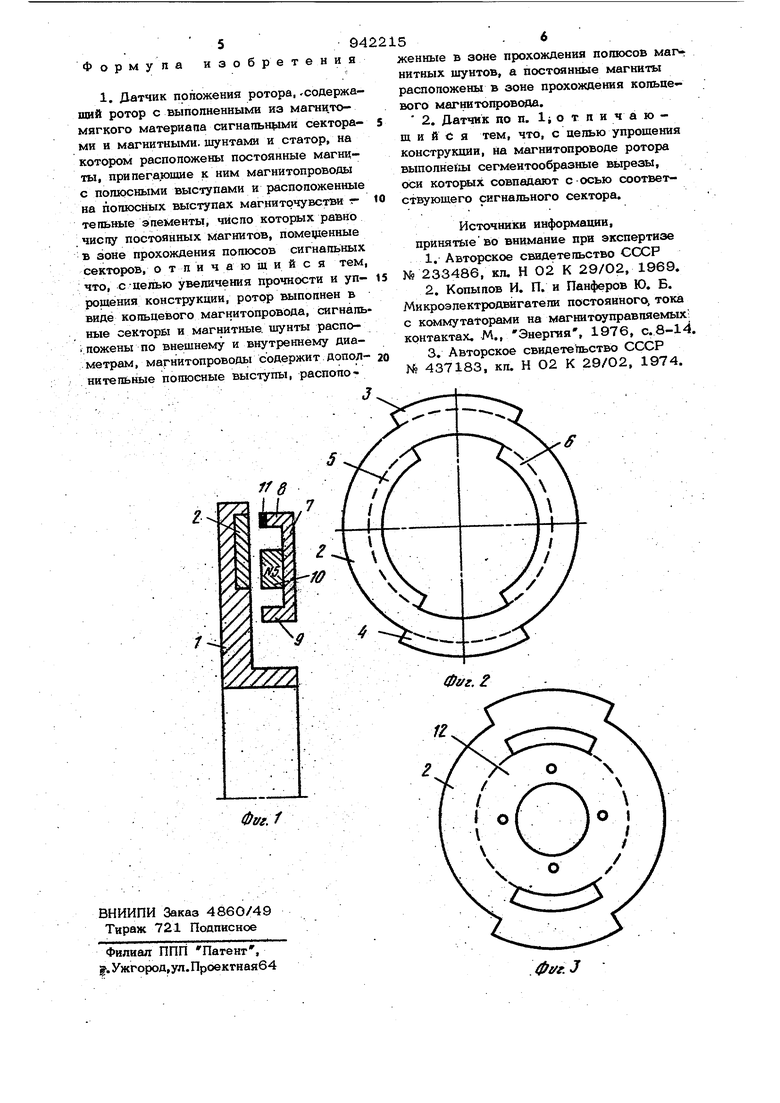
1 ;, - .Изобретение относится к электрическим машинам, а именно к высокоскорост ным вентильным двигателям. Известны датчики положения ротора вентильных двигателей, содержащие неподвижно расположенные магниточувствительные элементы и закрепленный на валу двигателя ротор с сигнальными секторами в виде постоянных магнитов ij. Недостатком таких датчиков является низкая прочность ротора,, обусловленная наличием на нем постоянных магнитов, что не позволяет использовать их в высокоскоростных машинах. Известны Д{1тчики положения ротора, содержащие закреплённый на вапу двигателя ротор с магнитомяггам экраном и расположенные неподвижно по разные ст роны экрана источники н.с. (постоянные магниты) и магниточувствительные элементы (2. Недостатком известньис датчиков с вращающими экранами является наличие двухстороннего зазора между подвижной к неподвижной частями датчика, что существенно усложняет конструкцию датчика и электрической машины. Наиболее близким к предлагаемому является датчик положения, который содержит неподвижно расположенные на магнитопроводах магниточувствитепьные эле менты (намагниченные в осевом направлении постоянные магниты) и закреплен- ный на вапу ротор, содержащий сигнапьный сектор в виде магнитомягкого попк са и магнитный шунт, расположенный с противоположной стороны попхх а, пара:плельно оси вращения. При врашенив ротора он либо замыкает магнитную цепь, состоящую из магниточувствительного элемента, магнитопровода, магнита и магкитомягкого полюса, либо шунтирует магнитный поток магнита шунтом, уменьшая тем самым паразитное влияние магнита на чувствительные элементы Сз. Недостатками датчика являются низкая прочность якоря и сложность конструкции. 394 Низкая прочность ротора обусловпена тем, что. распопоженный параллельно оси вращения магнитный шунт подвержен су- шественному воздействию изгибающегр} момента в местах его крепления к торцовой поверхности пошоса. В результате этого, при больших окружных скоростях магнитного шунта (свыше 70-80 м/с) он отгибается и. конструкция теряет свою работоспособность. Напичиё торцового и радиального зазоров усложняет конструкцию датчика и технологию изготовления. Цель изобретения - увеличение прочности poTopia, повышение за счет этого его окружной скорости и упрощение конструкции исключения двухсторонkero зазора.. Указанная цель достигается тем, что ротор выполнен в виде кольцевого магнитопровода, сигнальные секторы и магнитные шунты расположены по внешнему и внутреннему диаметрам, неподвижные ма нитопроводы содержат дополнительные по люсные выступы, расположенные в зоне прохождения полюсов магнитных шунтов а постоянные магниты расположены в зо не прохождения кольцевого магнитопровода. На фиг. 1 представлена конструкция датчика; на фиг. k - конфигурация кольцевого магнитопровода; на фиг. 3 - конструкция ротора. Датчик положения (фиг. 1 и 2) включает в себя ротор 1, на котором закреплен кольцевой магнитопровод 2 с полюсами сигнальных секторов 3 и 4, выполненных по наружному.диаметру, и полюсами магнитных шунтов 5 и .6, выполнен ных по внутреннему диаметру. Неподвиж, но закрепленные части датчика содержат магнитопровод 7 с полюсными выступами 8 и 9, к которому одним из полюсов при легает постоянный магнит 1О. Магниточувствительный элемент 11 закреплен на полюсном выступе 8. Магнитопроводы с постоянными магнитами и магниточувствительными элементами расположены относительно ротора таким образом, что магниточувствитепьные элементы находятся в зоне прохождения сигнальных секторов, магниты в зоне прохождения кольцевого магнитопровода, а погносные выступы, 8 в зоне прохождения «Магнитных центов. В конструкции ротора (фаг. 3) кольцевой магнитопровод соединен или выпол нен заодно с конструктивньш элементом 12, соединяющим между собой полюса, выполненные по внутреннему диаметру . Магнитные шунты образованы сегментообраэным вырезом, ось которого совпадает с осью сигнального элемента. Это упрощает конс-фукцию якоря и узпа крепления его к ротору. Датчик работает следующим образом. При вращении ротора с кольцевым магнитопроводом 2, полюса сигнальных секторов 3 и 4 и магнитных шунтов 5 и 6 поочередно замыкают магнитный поток постоянного магнита 10. В случае, когда в зоне магниточувствительного элемента 11 находится полюс сигнального сектора, например 3, магнитный поток замыкается через кольцевой магнитопровод 2, полюс сектора 3, магниточувствительный элемент 11, полюсный выступ 8 и магнитопровод 7. При отсутствии сигнального сектора в зоне магниточувствительного элемента магнитный поток замыкается через кольцевой магнитопровод 2, полюс магнитного шунта, например, 5, полюсный вы ступ 9 и магнитопровод 7. Поток через магни точу ветви тельный элемент при этом отсутствует. Применение такой конструкции позволяет увеличить окружную скорость ротора. Это достигается применением кольцевого магнитопровода, имеющего высокую механическую прочность. Так, для конструкции с сечением выступов полюсов, составляющих 0,5 от величины сечения непосредственно кольцевого магнитопровода, выполненного на магнитомягкой стали с пределом текучести 54 кг/мм , при условии полуторакратного запаса попрочности, окружная скорость кольцевого магнитопровода достигает 180 м/с. Применение более прочных сталей позволяет увеличить окружную скорость до 200-22О м/с. Кроме того, конструкция достаточно проста как в изготовлении, так и прИ; сборке машины с датчиком и его настройке. В значительной мере это обусловлено отсутствием двухстороннего рабочего зазора. Предлагаемый датчик положения ротора целесорбразно использовать в мощных высокоскоростных машинах, имеющих достаточно бошзшие Диаметра валов, что вызывает необходимость изготовления якоря датчика достаточно бопьщого диаметра с высокими окружными скоростями рабочих эпементов
