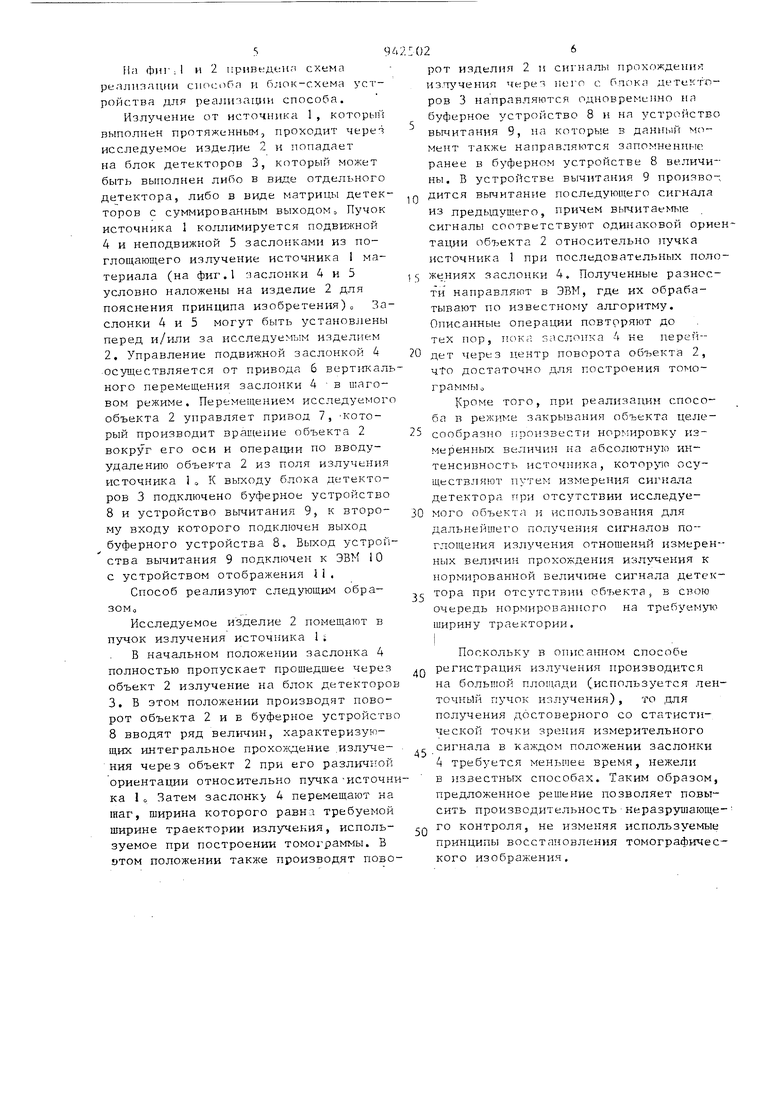
Изобретение относится к области ш-разрутаютего контроля внутреннего строения объектов радиациокными метод , Ияпестен способ радиационной BbWHCJiHTtju.Hoft томографии , заключаюищйся в томJ что производят линейное сканироыании и повороты сис:темь ис точник-детектор/ы/ относите; ль но исследу ;мого объекта. регистрирутот nporae vniee через объект по : аданной совокупности траект;1рий излучение, гфеобразуют зарегистрироваинь е сигна лы, направляют их з ЭВМ, где подвергают обработке, и из обработанных сигна.пов Формируют т оме; графическое изобр/Же.ни- . НаибО1}ее близки-- rexHirqecKilM реiiK.HHs.M ивлиется способ радиагдионной г(ьгчиг;,:;и:С:., томограсЬии, заключаюiUHfioi ; том, что исследуемое изделие облуч.ают пучком проника1п;це:.о излучения при относител1зном дв1)Ж(;нии иссле дуемого изде-лия и системы источникдетектор таким образом, что нучок излучения сканирует слой движущегося объекта по заданной совокупности траекторий заданной ширины, регистри руют детектором пргмиедшее через иссл луемое изде)тие по заданной совокупности траекторий излучение, получают сигнал111. представляющие со5ой величи ну псгл -)11,(.:ния излуче1гия исследуемым изделием, по указа1И1о;- сово : упности траекторий, обрабатывают пол генные сигна.лы в ЭВМ и восстанавливают изо ражение слоя исследуемого изделия. Недостатком известных способов я ляется невысокая производительность связанная с ограничениями на время единичногг) измерения, которое для п лучение; надежного результата измере ния не может быть сделано меньше определенной величины, зависящей от заданной илирины траекторий, т.е. ши рины нучка или ширины кг)ллиматора детектора„ Цетгь изобретения заклочается в том, чтобы повысить производительно Цель достигается тем, что в спос бе радиационной вычислительной томо графии, заключаюи;емся в том, что исследуемое изделие облучают пучком проникающего излуч.ения прк относите ном движении исс:ледуемого изделия и системы источник-де.тектсф таким образом, что пучок излучения сканир ет слой исследЕуемогс изделия по за2данной совокупности траектори зада}1ной ширины, регистрируют детектором прошедшее через исследуемое изделие излуг ение, получают сигналь:, представляющие собой величины ноглои1ения излучения исследуемым изделием но указанной совокупности траекторий, обрабатывают полученные сигналы в ЭВМ и производят восстановление изображения слоя исследуемсло изделия, облучение изделия производят плоским пучком, ширина которого по меньшей мере равна наибольшему линейному размеру исследуемого слоя i-зделия, регистрацию прошедшего через изделие излучения производят с помощьк протяженного детектора, изменяют ширину пучка первичного или прошедшего через изделие излучения в диапазоне между П ирино1 ттучка, соответствующей наибольшему линейному размеру исследуемого слоя, и заданной минимальной ширинсн пучка, не превосходяще ноловины указанного наибольшего линейного размера, а си1-налы, представляющие ве. поглощения излучения исследуемьм изделием по заданной совокупности траекторий , получают в виде разностей сигналов детектора, каждая из которых соответствует таким двум величинам Ширины нучка, равнина между котор)1ми равна заданной ширине траекторий, по которым определяется пог.км.чение излучения изделием. При этом изменение ширины нучка производят с помощью кол;н1матора с одной подвижной заслонкой при дискретном ее перемещении с шагом, равным заданной ширине траекторий, в каждом неподвижном положении шторки производят поворот изделия на 360°, а сигналы ноглощения излучении нолучают путем вычитания сигналов детектора для каждой нары носледозательных положений нодвижной заслонки коллиматора и одинаковых угловых ;1оложений исследуемого изделия, Кроме того, дополнительно произвоят измерение интенсивности пучка без изделия, нормируют результат изерения на заданную ширину траекторий, а сигналы поглощения излучения ормируют в виде отношения указанных азностей к нормированнот интенсивноси, источника. 59 ila фиГ:1 и 2 иривкдеип схема реализации способа и блок-схема устройства для реализащш способа. Излучение от источника 1, который выполнен протяженным, проходит череисследуемое изделие 2 и попадает на блок детекторов 3, который может быть выполнен либо в виде отдельного детектора, либо в виде матрицы детек торов с суммированным выходом. Пучок источника 1 коллимируется подвижной 4 и неподвижной 5 заслонками из поглощающего излучение источника 1 материала (на фиг.1 заслонки А и 5 условно наложены на изделие 2 для пояснения принципа изобретения) За слонки 4 и 5 могут быть установлены перед и/или за исследуемым изделием 2.Управление подвижной заслонкой 4 осуществляется от привода б вертикал ного перемещения заслонки 4 в шаговом режиме. Перемещением исследуемог объекта 2 управляет привод 7, Который производит вращение объекта 2 вокруг его оси и операции по вводуудалению объекта 2 из поля излучения источника 1 о К выходу блока детекторов 3 подключено буферное устройство 8 и устройство вычитания 9, к второму входу которого подключен выход буферного устройства 8. Выход устрой ства вычитания 9 подключен к 10 с устройством отображения 11, Способ реализуют следующим образомИсследуемое изделие 2 помещают в пучок излучения источника 1; В начальном положении заслонка 4 полностью пропускает прощедшее через объект 2 излучение на блок детекторо 3.В этом положении производят поворот объекта 2 и в буферное устройств 8 вводят ряд величин, характеризующих интегральное прохо : дение .излучения через объект 2 при его различной ориентации относительно пучка-источн ка 1 о Затем заслонку 4 перемещают на шаг, ширина которого равна требуемой ширине траектории излучения, используемое при построении томоа-раммы. В отом положении также производят пово 6 рот изделия 2 и сигналы прохождения из.ллчения чере пего с блока детекторов 3 направляются одновременно на буферное устройство 8 и на устройство вычитания 9, на которые в данный омент также направляются запомненные ранее в буферном устройстве 8 величины. В устройстве вь читания 9 произво-, дится вычитание последующего сигнала из предыдущего, причем вычитаемые сигналы соответствуют одинаковой ориентации объекта 2 относительно пучка источника 1 при последовательных положениях заслонки 4. Полученные разности направляют в ЭВМ, где их обрабатывают по известному алгоритму. Описанные операции повторяют до тех пор, п(ж;; злслопка 4 не перей-дет через центр поворота объекта 2, 4to достаточно для построения томограммы о того, при реализации способа в режиме закрывания объекта целесообразно произвести нор.ировку измеренных величин на абсолютную интенсивность источника , котор},по осуществляют путем измерения сигнала детектора при отсутствии исследуемого объекта н использования для дальнейшего пoлyчei ия сигналов поглощения излучения отношений измеренных величин прохождения излучения к нормированной велич1ше сигнала детектора при отсутствии объекта в свою очередь нормированного на тpeбye i o ширину траектории. j Поскольку в описанном способе регистрация излучения производится на большой площади (используется ленточный пучок излучения), то для получения достоверного со статистической точки зрения измерительного сигнала в каждом положении заслонки 4 требуется меньшее время, нежели в известных способах. Таким образом, предложенное решение позволяет повысить производительность неразруи ающего контроля, не изменяя используемые принципы восстановления томографического изображения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ контроля изделий методом вычислительной томографии | 1982 |
|
SU1082119A1 |
| Способ вычислительной радиационной томографии | 1978 |
|
SU766264A1 |
| Способ радиационного контроля шаровых объектов | 1980 |
|
SU936697A1 |
| Способ радиационной вычислительной томографии | 1987 |
|
SU1424480A1 |
| Способ радиационной вычислительной томографии | 1980 |
|
SU884402A1 |
| СПОСОБ ТОМОГРАФИЧЕСКОГО ИССЛЕДОВАНИЯ МИКРОСКОПИЧЕСКИХ ОБЪЕКТОВ И СКАНИРУЮЩИЙ МИКРОСКОП ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2413204C2 |
| Способ радиационного контроля плотности тепловыделяющих элементов | 1982 |
|
SU1124697A1 |
| Устройство для радиационного контроля стержневых ТВЭЛов | 1981 |
|
SU972347A1 |
| Способ томографического исследования объектов | 1983 |
|
SU1087932A1 |
| Томографическое вычислительное устройство | 1980 |
|
SU950204A3 |

1.СПОСОБ РАДИАЦИОННОЙ ВЫЧИСЛИТЕЛЬНОЙ ТОМОГРАФИИ, заключающийся в том, что исследуемое изделие облучают пучком проникающего изл 1енияпри oт юcйтeльнo i движении исследуемого изделия и системы источник-детектор таким образом, что пучок излучения сканирует слой исследуемого изделия заданной совокупности траекторий заданной , рехистрируют детектором нрошеди ее через исследуемое изделие излучение, получают сигналы, представляющие собой величину поглощения изл 1ения исследуемым изделием но указанной совокупности траекторий, обраб.атывают полученные сигналы в ЭВМ и производят восстановление изображения слоя исследуемого изделия, отличающийся тем, что, с целью повьщ1ения производительности, облучение изделия Г роизводят плоским пучком, щирина которого, по меньшей мере, равна наибольщему линейному размеру исследуемого слоя изделия, регистрацию прршедщего через изделие излучения производят с помощью протяженного детектора, изменяют ширину пучка первичного или прощедшего через из2 делие излучения в диапазоне между шириной пучка, соответствующей наиболынемл линеГпюму размеру исследуемого слоя, и заданно) мини альной шириной пучка, не превосходящей половины указанного наибольщего линейного размера, а сигналь:, представляющие величины поглощения излучения исследyeмh изделием по заданной совокупности траекторий, получают в разностей сигналов детектора, каждая из которых соответствует таким двум ве;п-1чинам ширины пучка, разница между которыми равна заданной ширине траекторий, по которым определтот поглощение излучения изделием о « 2,Способ по п,1, отличающ и и с я тем, что изме}1ение ширины пучка производят с помощью колл1матоf ра с одной подвижной заслонкой при %BCiOT дискретном ее перемеи ении с тагом, равным заданной ширине траекторий, в ка;-кдбм неподвижном положении шторки производят поворот изделия на 360°, 4 а сигналы поглощения излучения полую чают путем вычитания сигналов детекСд тора для каждой пары последовательных положений подвижной заслонки to коллиматора и одинаковых угловых положений исследуемого изделия 3оСпособ по ПП.1 и 2, о т л н чающийся тем, что дополнительно производят измерение интенсивности пучка без изделия, нормируют результат измерения на заданную ширину траекторий, а сигналы поглоще НИН излучения формируют в виде отнощения указанных разностей к нормированной интенсивности источника
,
/л.
п
J
...J
i 9
-J
.7/
| Устройство для управления трехфазным инвертором | 1985 |
|
SU1283915A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ вычислительной радиационной томографии | 1978 |
|
SU766264A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
