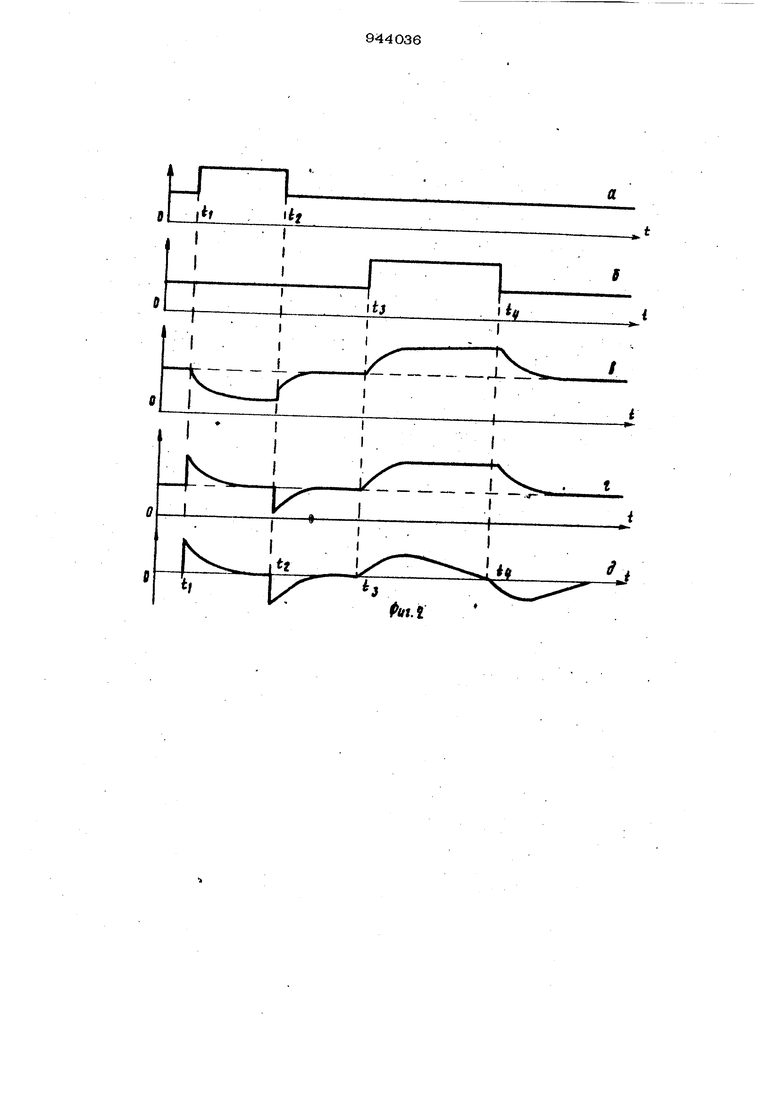
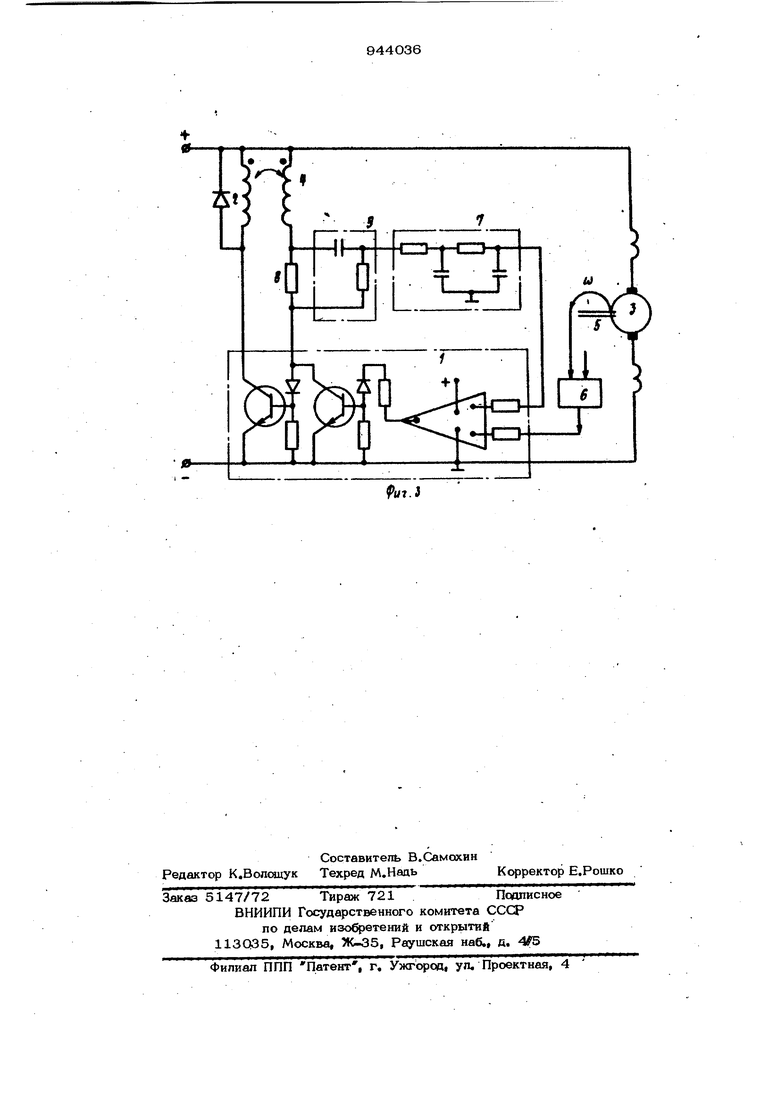
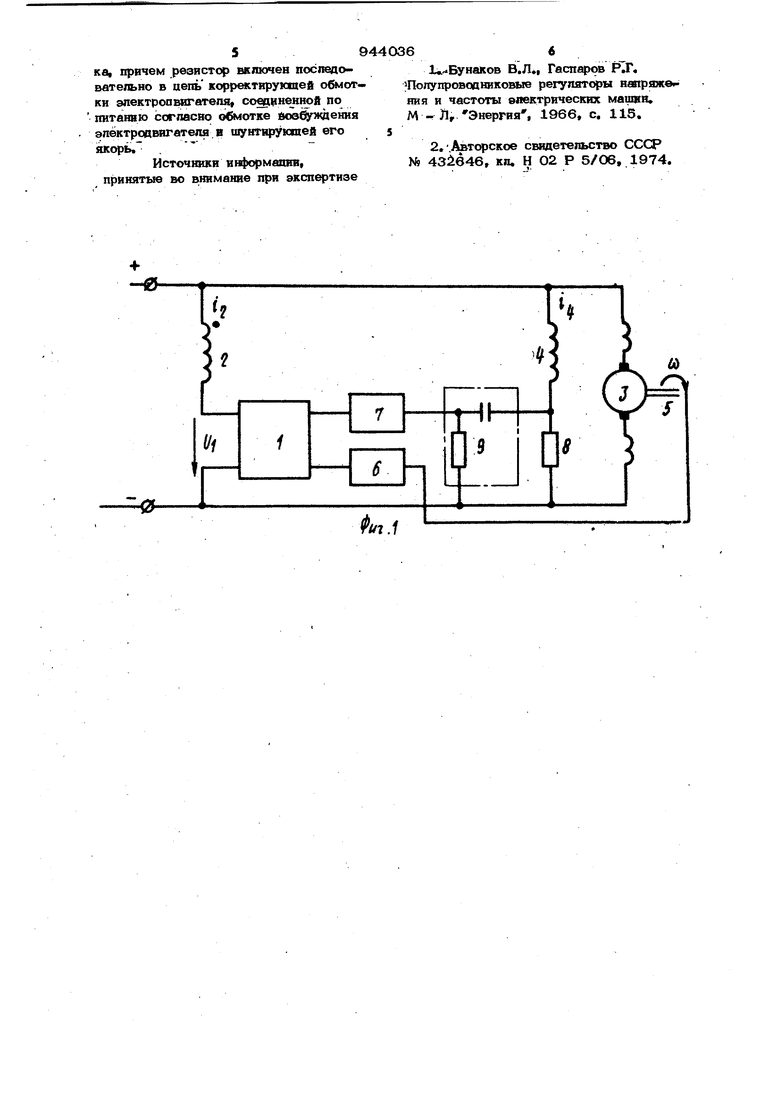
Изобретение относится к электротехнике, в частности, к быстродействукщим эпектропривоцам постоянного тока с управлением по цепи парапельного возбуждения электродвигателя. Известен электропривод постоянного тока с обратной связькз по скорости и управлением по цепи возбуждения электродвигатела от транзисторного усилителя модности tl . Однако электропривод характеризуется невысокой точностью регулирования скорости и склонностью к автокопебател ности установившегося процесса. Наиболее близким к изобретению ро технической сущности является электропривод постоянного тока, содержащий электродвигатель, усилитель )ощности, к выходу которого подключена шунтовая обмотка возбужденная злектродвигатепя, снабженного корректирующей обмоткой и датчиком скорости, выход которого соединен через ({юрмирователь обратной связи icjiiepBb i входом усилителя модности, соединенного вторым входом с выходом моделирующего блока С2 . Недостатком электрсэтривода, следующим из использования корректирующей обмотки только для получения сигнала гибкой обратной связи по производной магнитного потока, является невысокое быстродействие в переходных режимах. Цель изобретения - повыщение быстродействия электропривода. Цель достигается за счет того, что в известный электропривод постоянного тока дополнительно введены резистор и шунтирукяцаь его последовательная RC цепь, выход которой соединен с ЕКОДОМ моделирующего блока, причем резистор включен последовательно в цепь корректирующей обмбтки элёктродмгатбпя, соединяющей по питани о согласно обмот- ке возбуждения электродвигателя и шунтирующей его якорь. На фив 1 п жазана структурна$ электропривода; на фиг. 2 а« б в, г - временнь:е диаграммы его работы; 394 на фиг, 3 - один из возможных вариантов конкретного вьтопнения блоков струк TjrpHofi схемьи Электропривод постоянного тока содержит усилитель 1 мощности, к выходу которого подключена шунтовал обмотка 2 возбужденная электрсдвигатепя 3, снаб жонного корректирующей обмоткой 4 и датчиком 5 скорости, выход которого соединен через формирователь 6 обратНой связи с первым нхсдом усилителя 1, соединенного вторым входом с выходом моделирующего бпока 7, резистор 8 и шунтирующая его RC -цепь 9, выход которой соединен с входом моделирующего блока 7. Резистор 8 включен последовательно в цепь корректирующей обмотки 4 электродвигателя, соединенной по питанию согласно обмотке возбуждения электродвигателя,шунтирующей его якорь, соединенный с клеммами подключения источника питания. Усилитель 1 мощности может быть вьшолнен на операционном усилителе и выходных транзисторных каскадах, выход одного из которых соединен с цепью корректиоующей обмотки, а другой - с цепью основной обмотки возбуждения (фиг, 3). Моделирующий блок 7 может быть выполнен кас кадным соединением двух апериодических Г-образных RC -фильтров, постоянные времени которых соответствуют электромагнитной и электромеханической постоян ными времени электродвигателя 3. Электропривод постоянного тока работает следующим образом. При скачкообразных изменениях управ ляющего воздействия Ux, (фиг, 2а) в моменты времени t- и trj происходит соответствующее изменение постоянной составляющей тока in (фиг, 2 в) лишь в обмотке 2, связанной с выходом усилителя 1 мощности, В обмотке 4, магнитно связанной с обмоткой 2, наводится при этом лишь переменная составляющая напряжения тока ( фиг. 2 t) пропорциональная производной от управляющего воздействия и , Эта переменная составляющая передается перехсдной RC-цепью 9 на вход модели 7 как сигнал гибкой отрицательной офатной связи и (при замыкании этой цепи Qвходом усилителя мощности) осуществляет необходимую частотную коррекцию регулятора, обеспечивая его устойчивость и необходимое качество протекания переходньк процессов. При скачкообразных изменениях возмущающего воздействия U(i в 6 .4 моменты времени i и t (фиг. 2(Г) одновременно изменяются постоянные составляющие тока в обмотках 2 и 4, причем изменещ/Ь тока 14 обмотке 4 имеет апериодический характер, определяемый суммарной постоянной времени (( Ь как это показано на фиг, 21. Переходная R С-цепь 9 при этом пропускает Шшь переменную составляющую напряжения на резистс е 8, обтекаемого током 14 , Сравнение выходных сигналов переходной R С-цепи 9 по графику на фиг, 2 д указывает на качественно различный характер этих сигналов, возникающих при управляющем или возмущающем воздействии, так как при возникновении возмущающего воздействия выходной сигнал переходной RC-цепи Я соответствует по полярности сигналу ги&кой положительной обратной связи, ус:коряюшему переходный процесс изменения тока в основной обмотке возбуждения 2, подключенной к выходу усилителя 1 мощности. Таким образом в предложеннь1М электроприводе обеспечивается повышение быстродействия электропривода при от- . работке указанного вида возмущений с сохранением в то же время необходимо го запаса устойчивости замкнутой системы регулирования. Кроме того, согласное подключение корректирующей обмотки создает начальный магнитный поток возбуждения двигателя, разгружая тем самым по току цепь егошунтовой обмотки и упрошая цепь питания выходного транзисторного каскада усилителя мощности. Формула изобретения Электропривод постоянного тока, содержащий электродвигатель, усилитель мощности, к выходу которого подключена иогнтовая обмотка возбуждения электродвигателя, снабженного корректирующей обмоткой и датчиком скорости, выход которого соединен через формирователь обратной связи с nejDBbiM входом усилителя мощности, соединенного вторым входом с выходом моделирующего блока, отличающийся тем, что, с целью повышения быстроаействия электропривода, в него дополнительно введе- HbJ резистор и шунтирующая его последовательная RC-цепь, выход которой соединен с входом моделирующего бло-.
ка, причем резистор включен последовательно в цепь корректирукхпей о6мот ки электропшгатепя, соединенной по питанию согласно обмотке возбу ения эпёктропвигателя в шунтирующей его якорь, .
Источники И1в{ ормашШ| принятые во вынимание при экспертизе
1«Бунаков В.Л., Гаспаров Р.Г« Полупроводниковые регуляторы на1ряже ни я и частоты впектрических машин. М - Л, Энергия, 1966, с. 115,
2,.Авторское свидетельство СССР № , кл, Н 02 Р 5/О6, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор частоты вращения для электродвигателя постоянного тока | 1980 |
|
SU944041A1 |
| Электропривод постоянного тока | 1987 |
|
SU1515312A1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С ТИРИСТОРНЫМ УПРАВЛЕНИЕМ | 2001 |
|
RU2208530C2 |
| Электропривод постоянного тока | 1983 |
|
SU1145438A1 |
| Силовой следящий электропривод для управления угловым положением объекта | 1962 |
|
SU152011A1 |
| Устройство для управления электродвигателем постоянного тока | 1978 |
|
SU758451A1 |
| Электропривод | 1985 |
|
SU1314426A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1997 |
|
RU2123230C1 |
| Способ автоматического управления электроприводом центрифуги и устройство для его осуществления | 1984 |
|
SU1292842A1 |
| НЕРЕВЕРСИВНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1989 |
|
RU2020714C1 |