Изобретение относится к управленио электроприводом центрифуги периодического действия в сахарном производстве.
Цель изобретения - .повышение производительности центрифуги.
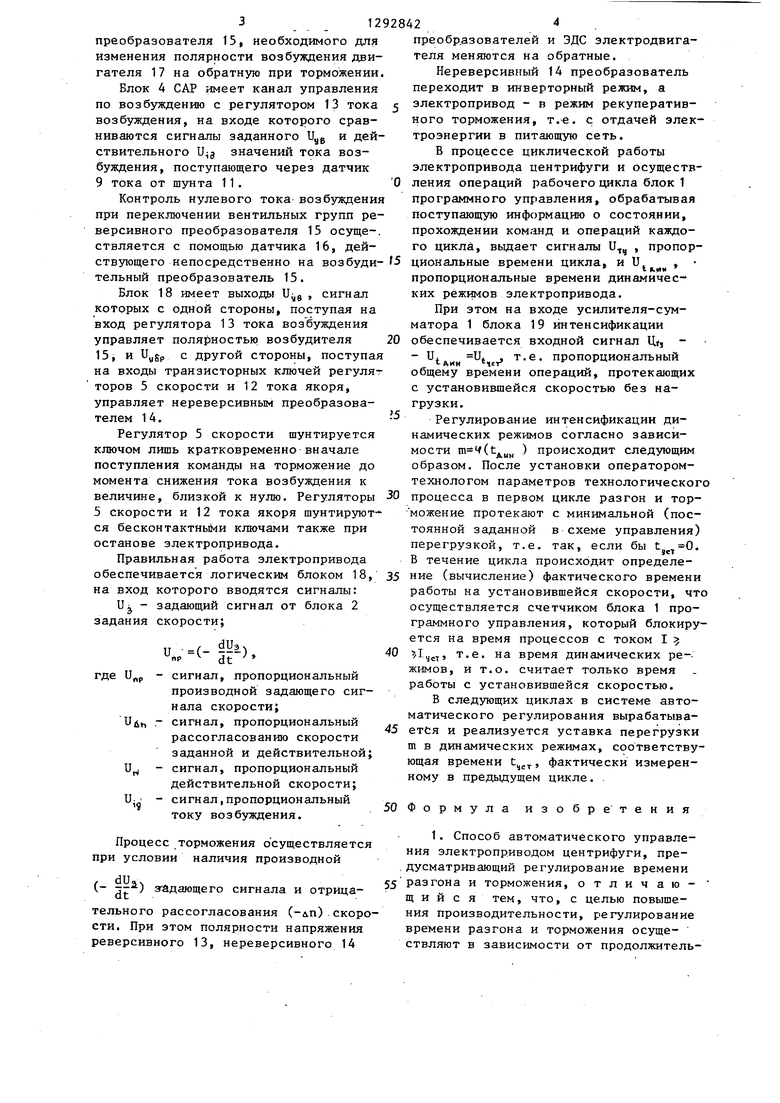
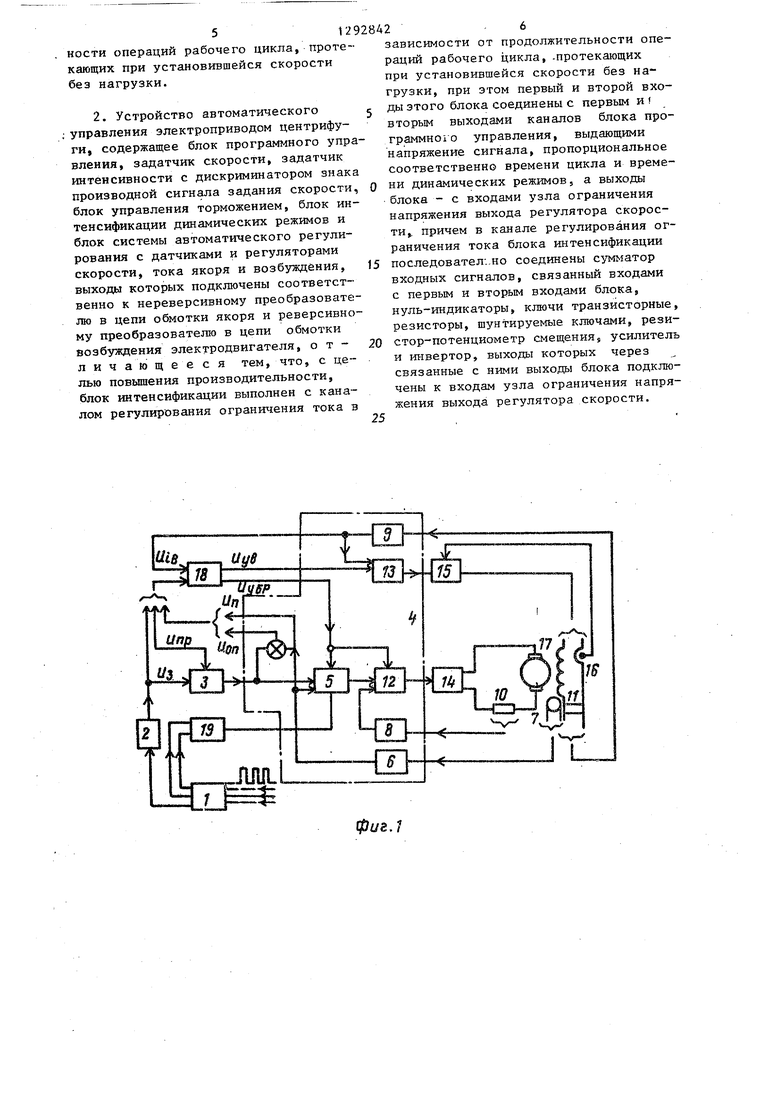
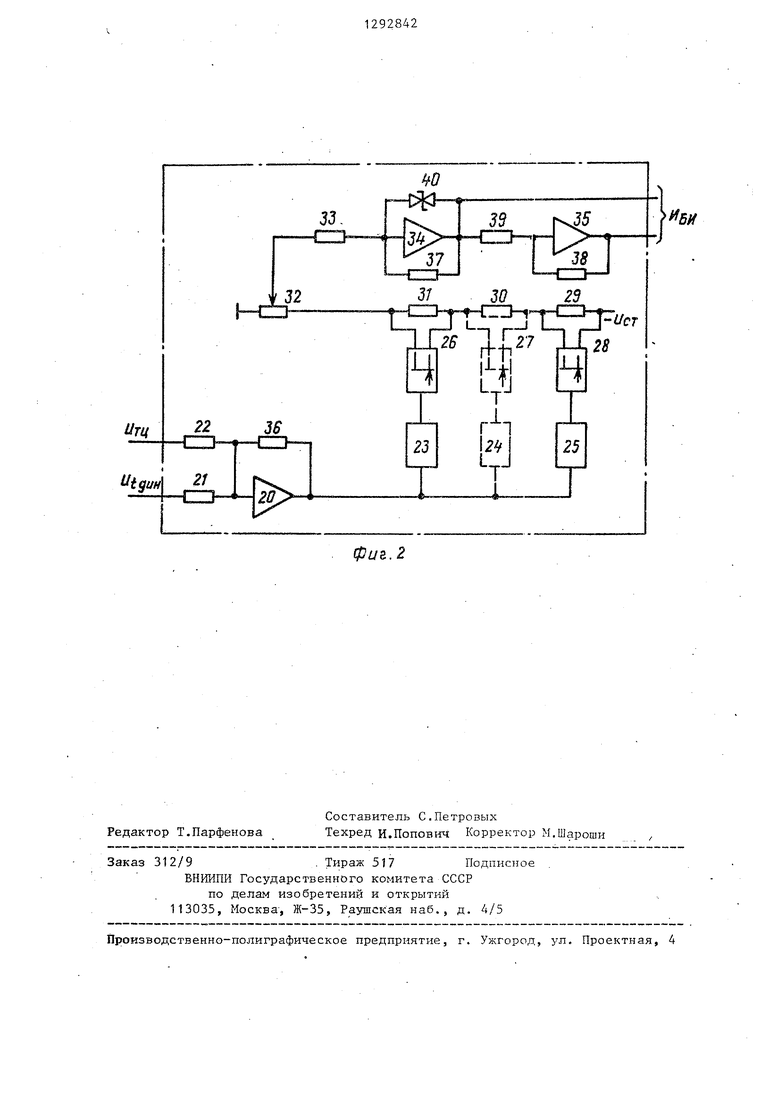
На фиг.1 изображено устройство для осуществления способа; на фиг„2- блок интенсификации динамических режимов
Устройство содержит последовательно соединенные блок 1 программного управления, задатчик 2 скорости, за- датчик 3 интенсивности с дискриминатором знака производной сигнала задания скорости, блок 4 системы автоматического регулирования (САР) с регулятором 5 скорости, соединенным через датчик 6 скорости с тахогенератором 7, с подключенными через датчики 8 и 9 к шзгнтам 10 и 11 регуляторами 12 и 13 тока якоря и тока возбуждения, выводы которых подключены соответственно к нереверсивному преобразоватег..25 ся в блоке 1 до начала последующего циклю 14 в цепи обмотки якоря и к реверсивному преобразователю 15 с датчиком 16 нулевого тока в цепи обмотки возбуждения электродвигателя 17, а также
ла и выдается в виде напряжения сигнала и и, , пропорционального времени.
Сигнал задания установки скорости
блок 18 управления торможением и .блок 19 интенсификации динамических режимов электропривода.
Блок 19 интенсификации динамических режимов представлен на фиг.2, где обозначены напряжения-сигиалы:
Ц
напряжение источника питания.
стабилизированное; U - напряжение сигнала выхода блока интенсификации, подаваемое на узел ограничения напря жения выхода, регулятора скорости; U; - напряжение сигнала первого вхо- да, пропорциональное времени операций рабочего цикла, протекающих при установившейся скорости без нагрузки; .н напряжение сигнала второго входа, пропорциональное времени динамических режимов.
Первый и второй входы сумматора 20 входного сигнала, равного
- Ut, связаны через резисторы 21 и 22 с первым и вторым входами блока С выхода сумматора 20 через нуль-индикаторы 23. - 25 подключены транзисторные ключи 26 - 28, шунтирующие резисторы 29 - 31 в цепи резистора- потенциометра 32 и резистора 33 на входе усилителя 34, выход которого непосредственно и через инвертор 35
связан с выходами блока, подключенными по сигналу Uj; к узлу ограничения напряжения выхода регулятора 5 скорости. Резисторы 36 - 38 обратной
связи служат.для выбора коэффициентов усиления операционных усилителей 20,34 и 35. Резистор 39 соединяет выход усилителя 34 и инвертора 35. Узел 40, представляющий встречновключенные стабилитроны, ограничивает сигнал усилителя 34.
Устройство работает следующим образом.
Командный сигнал управления операциями рабочего цикла формируется пока- нально в блоке 1 программного управ- .ления. В результате переработки поступающей информации в блоке 1 вырабатывается новая команда управления,которая выдается лишь при условии испол- . нения предыдущей операции.Время операций рабочего цикла время динамических режимов t ,, считается и запоминается в блоке 1 до начала последующего цикла и выдается в виде напряжения сигнала и и, , пропорционального времени.
Сигнал задания установки скорости
0
0
5
с блока 1 программного управления поступает на задатчик 2 скорости и далее через задатчик 3 интенсивности на вход блока 4 САР. Задатчик 3 интенсивности выполнен с дискриминатором 5 знака производной сигнала задания скорости, что позволяет контролировать характер динамического режима: разгон или торможение.
Входом сигнала задания блока 4 служит ВХОД регулятора 5 скорости. На входе регулятора 5 заданное значение скорости сравнивается с ее текущим значением, снимаемым через датчик 6 скорости от тахогенератора 7.
Регулятор 5 скорости имеет встроенный в нем узел управляемого ограничения напряжения выхода. Напряжение выхода регулятора 5 скорости служит заданием тока на входе регулятора 12 тока якоря, где оно сравнивается с сигналом действительного его значения, снимаемым через датчик 8 тока с шунта 10.
С выхода регулятора 12 тока якоря сигнал управления приходит на вход нереверсивного преобразователя 14, питающего обмотку якоря электродвигателя -17. Обмотка возбуждения последнего получает питание от реверсивного
0
5
преобразователя 15, необходимого для изменения полярности возбуждения двигателя 17 на обратную при торможении
Блок 4 САР имеет канал управления по возбуждению с регулятором 13 тока возбуждения, на входе которого сравниваются сигналы заданного U,,e и действительного значений тока возбуждения, поступающего через датчик 9 тока от шунта 11.
Контроль нулевого тока возбуждения при переключении вентильных групп реверсивного преобразователя 15 осуще-. ствляется с помощью датчика 16, дей- ствзтощего непосредственно на возбуди- тельный преобразователь 15.
Блок 18 имеет выходы U
1в
сигнал
которых с одной стороны, поступая на вход регулятора 13 тока возбуждения управляет полярностью возбудителя 15, и Uygp с другой стороны, поступа на входы транзисторных ключей регуля торов 5 скорости и 12 тока якоря, управляет нереверсивным преобразователем 14.Регулятор 5 скорости шунтируется ключом лишь кратковременно вначале поступления команды на торможение до момента снижения тока возбуждения к величине, близкой к нулю. Регуляторы 5 скорости и 12 тока якоря шунтируют ся бесконтактными ключами также при останове электропривода.
Правильная работа электропривода обеспечивается логическим блоком 18, на вход которого вводятся сигналы:
Uj - задающий сигнал от блока 2 задания скорости;
и (- У)
р dt
де - сигнал, пропорциональный
производной задающего сигнала скорости;
Uit, .- сигнал, пропорциональный . рассогласованию скорости заданной и действительной;
и - сигнал, пропорциональный действительной скорости;
- сигнал .пропорциональный току возбуждения.
S
50
Процесс торможения осуществляется при условии наличия производной
f dUa.
V- jr з-адающего сигнала и отрицательного рассогласования (-дп) скорости. При этом полярности напряжения реверсивного 13, нереверсивного 14
5 О
5
0 0
5
0
.
преобразователей и ЭДС электродвигателя меняются на обратные.
Нереверсивный 14 преобразователь переходит в инверторный режим, а электропривод - в режим рекуперативного торможения, т.е. с отдачей электроэнергии в питающую сеть.
В процессе циклической работы электропривода центрифуги и осуществления операций рабочего 1щкла блок 1 программного управления, обрабатывая поступающую информацию о состоянии, прохождении команд и операций каждого цикла, вьщает сигналы U , пропорциональные времени цикла, и U , пропорциональные времени динамических режимов электропривода.
При этом на входе усилителя-сумматора 1 блока 19 интенсификации обеспечивается входной сигнал Ut, - - Uj t j. т.е. пропорциональный общему времени операций, протекающих с установившейся скоростью без нагрузки.
Регулирование интенсификации динамических режимов согласно зависимости (t,j ) происходит следующим образом. После установки оператором- технологом параметров технологического процесса в первом цикле разгон и тор- можение протекают с минимальной (постоянной заданной в схеме управления) перегрузкой, т.е. так, если бы . В течение цикла происходит определение (вычисление) фактического времени работы на установившейся скорости, что осуществляется счетчиком блока 1 программного управления, который блокируется на время процессов с током I Ту, т.е. на время динамических ре-, жимов, и т.о. считает только время работы с установившейся скоростью.
В следующих циклах в системе автоматического регулирования вырабатывается и реализуется уставка перегрузки m в динамических режимах, соответствующая времени t., фактически измеренному в предыдущем цикле. .
50 Формула изобре тения
1. Способ автоматического управления электроприводом центрифуги, пре- . дусматривающий регулирование времени 55 разгона и торможения, отличающийся тем, что, с целью повышения производительности, регулирование времени разгона и торможения осуществляют в зависимости от продолжитель
з п
ности операций рабочего цикла, протекающих при установившейся скорости без нагрузки.
зависимости от продолжительности операций рабочего цикла, -протекающих при установившейся скорости без нагрузки, при этом первый и второй входы этого блока соединены с первым и вторым выходами каналов блока программною управления, выдающими напряжение сигнала, пропорциональное соответственно времени цикла и време2. Устройство автоматического управления электроприводом центрифуги, содержащее блок программного управления, задатчик скорости, задатчик
интенсивности с дискриминатором знака динамических режимов, а выходы производной сигнала задания скорости, О ограничения блок управления торможением, блок ин- „, регулятора скорос- тенсификации динамических режимов и регулирования ограничения тока блока интенсификации 15 последовател-..но соединены сумматор входных сигналов, связанный входами с первым и вторым входами блока, нуль-индикаторы, ключи транзисторные, резисторы, шунтируемые ключами, рези- 20 стор-потенциометр смещения, усилитель и инвертор, выходы которых через
д л V- д-4( т-1-блок системы автоматического регулирования с датчиками и регуляторами скорости, тока якоря и возбуждения, выходы которых подключены соответственно к нереверсивному преобразователю в цепи обмотки якоря и реверсивному преобразователю в цепи обмотки возбуждения электродвигателя, о т - л и ч а ю щ е е с я тем, что, с целью повышения производительности, блок интенсификации выполнен с каналом регулирования ограничения тока в
25
связанные с ними выходы блока подклю чены к входам узла ограничения напряжения выхода регулятора скорости.
2
зависимости от продолжительности операций рабочего цикла, -протекающих при установившейся скорости без нагрузки, при этом первый и второй входы этого блока соединены с первым и вторым выходами каналов блока программною управления, выдающими напряжение сигнала, пропорциональное соответственно времени цикла и време динамических режимов, а выходы ограничения „, регулятора скорос- регулирования ограничения тока блока интенсификации последовател-..но соединены сумматор входных сигналов, связанный входами с первым и вторым входами блока, нуль-индикаторы, ключи транзисторные резисторы, шунтируемые ключами, рези стор-потенциометр смещения, усилител и инвертор, выходы которых через
динамических режимов, а выходы ограничения „, регулятора скорос- регулирования ограничения тока блока интенсификации последовател-..но соединены сумматор входных сигналов, связанный входами с первым и вторым входами блока, нуль-индикаторы, ключи транзисторные, резисторы, шунтируемые ключами, рези- стор-потенциометр смещения, усилитель и инвертор, выходы которых через
связанные с ними выходы блока подклю чены к входам узла ограничения напряжения выхода регулятора скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления электроприводом центрифуги | 1987 |
|
SU1618451A1 |
| Электропривод постоянного тока шахтной подъемной установки | 1988 |
|
SU1654208A1 |
| Реверсивный электропривод | 1986 |
|
SU1372568A1 |
| Реверсивный электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1394383A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1982 |
|
SU1096745A1 |
| Электропривод подъемной машины | 1980 |
|
SU893780A1 |
| Устройство управления дуговой сваркой | 1987 |
|
SU1505705A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Устройство для управления электродвигателем постоянного тока | 1982 |
|
SU1080241A1 |
| Устройство для управления электроприводом постоянного тока | 1978 |
|
SU736320A1 |
Изобретение относится к управлению электроприводом центрифуги периодического действия в сахарном производстве и направлено на повышение производительности центрифуг. Сущность : изобретения; состоит в том, что регулирование процессов разгона и торможения осуществляется в зависимости от общего времени операций рабочего цикла, протекающих при установившейся скорости без нагрузки, измеряемого как разность времени цикла и времени динамических режимов. При этом регулирование интенсификации динамических режимов происходит автоматически с помощью устройства, в котором определение допустимой перегрузки идет непосредственно по постоянно заданной зависимости (ty(,T ) R ™ перегрузка по моменту (току), , полное время работы на установившейся CKopqcTn без нагрузки. Зависимость (t,,jT ) обеспечивает нормальный нагрев электродвигателя и ограничение максимальной перегрузки m в функции t,,. Регулирование интенсификации динамических режимов происходит после установки оператором-технологом параметров технологического цикла в пер-- вом цикле, в котором разгон и торможение протекают с минимальной (постоянно заданной) перегрузкой т, т.е. так, если бы t..-B течение цикла определяется фактическое время работы на установившейся скорости с помощью, счетчика, блокируемого на время динамических режимов. В следующих циклах вырабатывается и реализуется уставка перегрузки m в динами ческих режимах, соответствующая времени t, фактически измеренному в предыдущем цикле. 2 с.п. ф-лы. 2 ил. с о (Л с КУ 00 ю
фив,1
Редактор Т.Парфенова
Составитель С.Петровых
Техред И.Попов Эт Корректор М.Шароши
Заказ 312/9. Тираж 517 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва-, Ж-35, Раушская наб. , д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фив.2
| Авторское свидетельство СССР № 914091, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
