Изобретение относится к электротехнике и может быть использовано для привода различных механизмов.
Известны различные устройства нереверсивных вентильных электроприводов.
Наиболее близким к предложенному по технической сущности является нереверсивный вентильный электропривод, который содержит двигатель постоянного тока независимого возбуждения, подключенный якорем к выходу однотактного вентильного преобразователя, входные цепи которого соединены с фазами источника питания переменного тока; систему импульсно-фазового управления, подключенную к выходу регулятора, первые два входа которого соединены соответственно с узлом задания и датчиком тока якоря электродвигателя, а третий - с выходом узла моделирования контура тока; датчик напряжения двигателя, подключенный входными клеммами к якорю двигателя. Узел моделирования контура тока выполнен в виде двух каскадно включенных первого и второго операционных усилителей, а регулятор электропривода в соответствии с принципом подчиненного управления содержит каскадно включенные регулятор скорости и регулятор тока, связанный выходом с входом системы импульсно-фазового управления, имеющей арккосинусоидальную характеристику вход-выход. При этом первый операционный усилитель узла моделирования контура тока электропривода охвачен параллельно включенными резистором и конденсатором, чем моделируется электромагнитная постоянная времени цепи якоря двигателя, и связан по входу с дифференциально подключенными выходом датчика напряжения якоря двигателя и выходом регулятора тока, который пропорционален выходной ЭДС вентильного преобразователя. Второй операционный усилитель охвачен параллельно включенными резистором и блокирующим диодом и связан посредством согласующего резистора с третьим входом регулятора тока электропривода, первый и второй суммирующие входы подключены к выходу регулятора скорости и к выходу датчика тока якоря двигателя.
В рабочем статическом установившемся режиме электропривода, когда ЭДС вентильного пpеобразователя больше величины противо-ЭДС двигателя, указанный диод в цепи обратной связи второго операционного усилителя блокирует выход узла моделирования контура тока электропривода, управление которым производится его регуляторами скорости и тока. Соответственно в динамическом режиме подтормаживания электропривода, когда противо-ЭДС двигателя запирает тиристоры однотактного вентильного преобразователя и цепь якоря двигателя обесточена, указанным узлом моделируется замкнутый контур тока электропривода, благодаря чему по мере снижения величины противо-ЭДС двигателя в процессе его механического торможения моментом статического сопротивления приводимого механизма осуществляется одновременно следящее подрегулирование углов управления и величины ЭДС однотактного вентильного преобразователя вплоть до момента окончания режима подтормаживания. Поэтому в момент замыкания силовой цепи электропривода по току заключительный переходный процесс перехода электропривода в новое установившееся статическое состояние происходит благодаря подготовленному состоянию его регуляторов и вентильного преобразователя практически без автоколебаний с минимальными динамическими бросками тока якоря и момента двигателя, когда снижающаяся скорость вращения привода достигает нового заданного уровня, определяемого углом задания.
Недостатками электропривода прототипа являются сложность выполнения узла моделирования контура тока, содержащего два каскадно включенных операционных усилителя с их местными цепями обратных связей, а также датчик напряжения цепи якоря, используемых лишь кратковременно на этапе переходного подтормаживания электропривода; ограниченные функциональные возможности, обусловленные необходимостью выполнения регулятора электропривода по принципу подчиненного управления в виде каскадно соединенных регуляторов скорости и тока; исполнение системы импульсно-фазового управления с арккосинусоидальной характеристикой вход-выход, а также настройкой параметров регуляторов и узла моделирования контура тока в соответствии с параметрами двигателя.
Целью изобретения является упрощение и расширение функциональных возможностей нереверсивного электропривода постоянного тока.
Это достигается тем, что в нереверсивный электропривод постоянного тока, содержащий электродвигатель независимого возбуждения, подключенный якорем к выходу вентильного преобразователя, входные цепи которого соединены с фазами источника питания переменного тока; систему импульсно-фазового управления, подключенную к выходу регулятора, первые два входа которого соединены соответственно с узлом задания и датчиком тока якоря электродвигателя, а третий - с выходом узла моделирования контура тока; датчик напряжения электродвигателя, подключен- ный первой входной клеммой к якорю электродвигателя; в него введена диодная логическая схема ИЛИ, а вентильный преобразователь выполнен в виде последовательно соединенных управляемого и неуправляемого мостовых выпрямителей, выход диодной логической схемы ИЛИ подключен к второй входной клемме датчика напряжения электродвигателя, а входы - к входным зажимам переменного тока неуправляемого мостового выпрямителя.
При этом управляемый мостовой выпрямитель, анодная группа вентилей неуправляемого мостового выпрямителя, диодная логическая схема ИЛИ и датчик напряжения электродвигателя образуют узел моделирования контура тока, выходом которого является выход датчика напряжения электродвигателя.
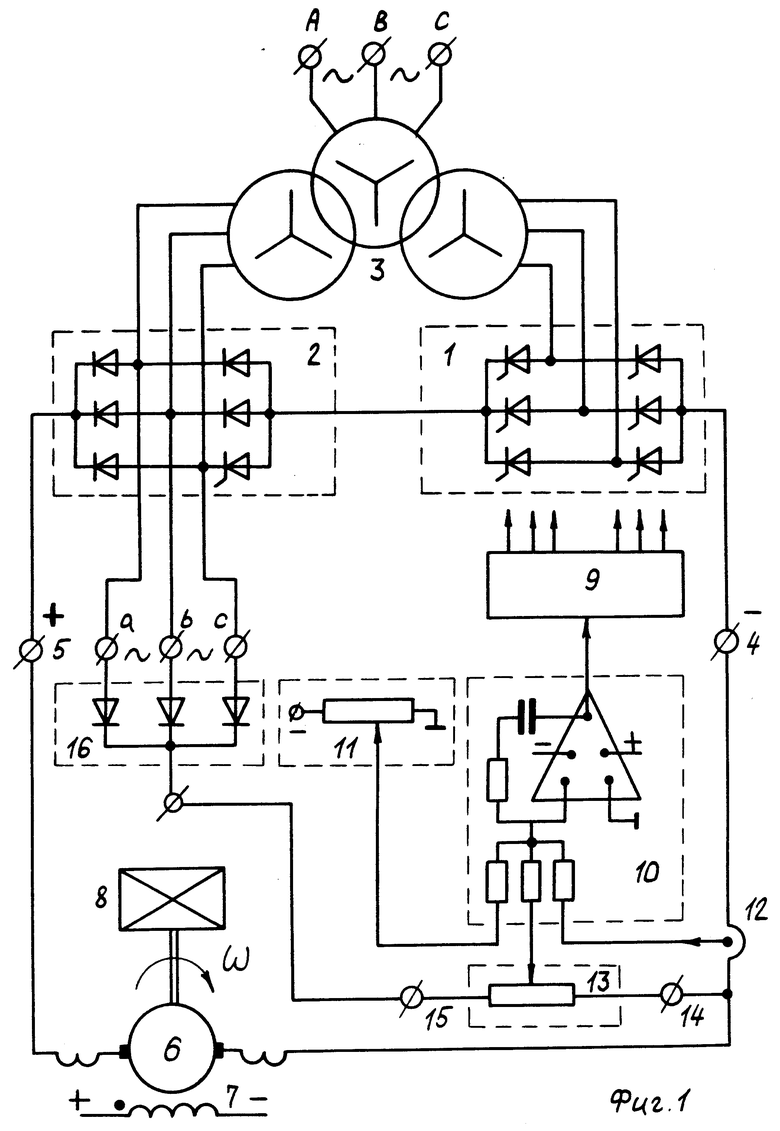
На фиг. 1 приведена принципиальная схема нереверсивного электропривода постоянного тока; на фиг. 2 - временные графики, поясняющие работу электропривода.
Электропривод содержит однотактный вентильный преобразователь, выполненный в виде последовательно соединенных управляемого 1 и неуправляемого 2 мостовых выпрямителей, входные цепи которых соединены с фазами A, B, C источника питания переменного тока посредством согласующего трехобмоточного трехфазного трансформатора 3. Выходные клеммы 4 и 5 вентильного преобразователя подключены к якорной цепи 6 двигателя постоянного тока, имеющего также обмотку 7 независимого возбуждения и связанного выходным валом с приводимым механизмом 8.
Управляемый мостовой выпрямитель 1 вентильного преобразователя имеет систему 9 импульсно-фазового управления, подключенную входом к выходу регулятора 10, выполненного, например, в виде ПИ-регулятора на суммирующем операционном усилителе с его охватом динамической RC-цепью коррекции. Первые два входа регулятора 10 соединены соответственно с узлом задания 11 и с датчиком 12 тока якоря двигателя. Датчик 13 напряжения электродвигателя, выходом связанный с третьим входом регулятора 10, подключен первой входной клеммой 14 к якорю 6 двигателя со стороны выходной клеммы 4 управляемого мостового выпрямителя 1, а своей второй входной клеммой 15 подключен к выходу введенной диодной логической схемы ИЛИ 16, тремя входными клеммами a, b, c связанной с входными зажимами переменного тока неуправляемого мостового выпрямителя 2 вентильного преобразователя. При этом управляемый мостовой выпрямитель 1, анодная группа вентилей неуправляемого мостового выпрямителя 2, диодная логическая схема ИЛИ 16 и датчик 13 напряжения электродвигателя образуют узел моделирования контура тока, выходом которого является выход датчика 13 напряжения электродвигателя.
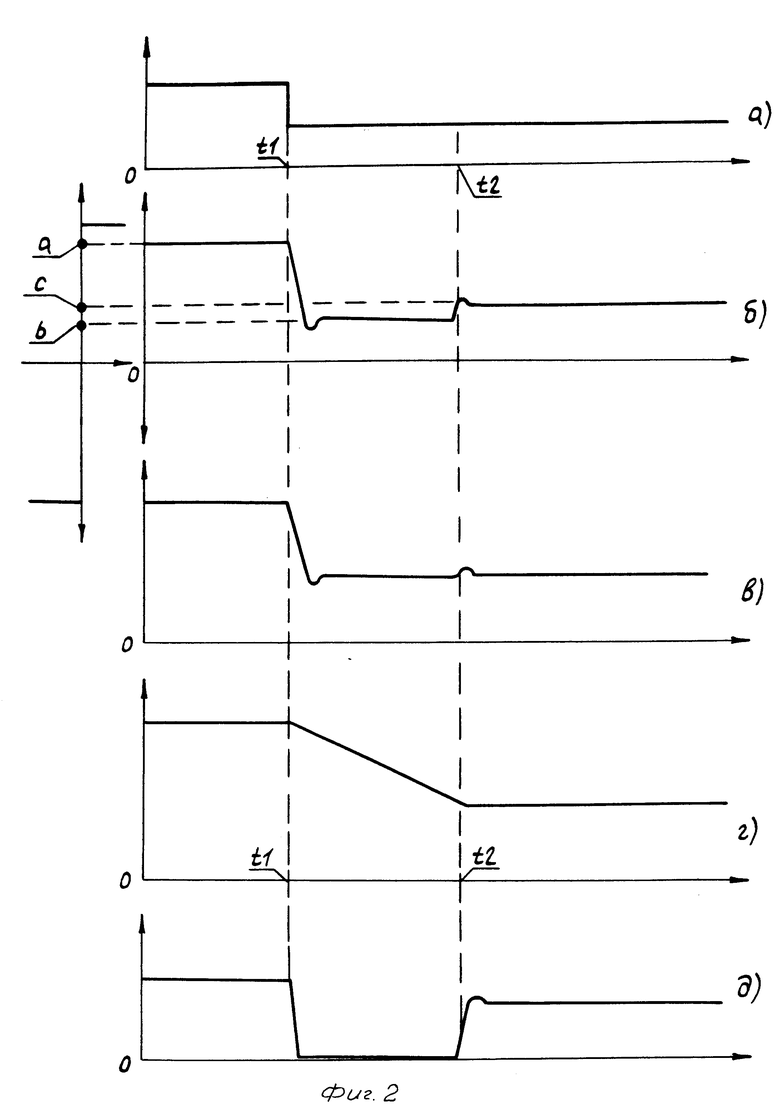
Статический установившийся режим работы электропривода, а также переходный процесс его подтормаживания иллюстрируется временными графиками (см. фиг. 2, а-д), где соответственно обозначены:
изменения выходного напряжения узла задания 11 (см. фиг. 2, а);
изменения выходного напряжения регулятора 10 (см. фиг. 2, б), причем в левой части фиг. 2, б приведена статическая характеристика вход-выход этого ПИ-регулятора;
изменения среднего значения выходного напряжения (или эквивалентной ЭДС) вентильного преобразователя (см. фиг. 2, в);
изменения выходной частоты вращения выходного вала электродвигателя 6 (см. фиг. 2, г);
изменения тока якорной цепи 6 электродвигателя (см. фиг. 2, д).
Установившийся рабочий, например номинальный режим работы электропривода, отраженный на начальном интервале временных графиков (см. фиг. 2), соответствует номинальной величине выходного напряжения узла задания 11 (см. фиг. 2, а при t < t1), поступающего на первый вход ПИ-регулятора 10, выходное напряжение которого при этом имеет повышенное значение (см. фиг. 2, б при t < t1), но не превышает уровня насыщения его операционного усилителя, что условно показано точкой а на статической характеристике вход-выход (см. фиг. 2, б).
Система 9 импульсно-фазового управления, подключенная к выходу регулятора 10, отпирает тиристоры управляемого мостового выпрямителя 1, выходное напряжение которого, суммируясь с выходным напряжением неуправляемого мостового выпрямителя 2, соответствует необходимой номинальной величине выходного напряжения вентильного преобразователя на его выходных клеммах 4 и 5, подводимого к якорной цепи 6 двигателя постоянного тока независимого возбуждения (см. фиг. 2, г при t < t1).
Двигатель 6, вращая выходной вал и приводимый механизм 8 с номинальной частотой вращения (см. фиг. 2, г при t < t1) и номинальным моментом, потребляет при этом номинальный уровень тока по якорной цепи 6 (см. фиг. 2, д при t < t1), имея на обмотке 7 независимого возбуждения соответствующее (номинальное) напряжение питания. Датчик 13 напряжения якоря электродвигателя, подводя свое выходное напряжение к третьему входу операционного усилителя 10 ПИ-регулятора электропривода, обеспечивает, замыкая цепь жесткой отрицательной обратной связи, стабилизацию выходного (номинального) напряжения вентильного преобразователя, компенсируя, например, изменения напряжения источника питания переменного тока на входной цепи A, B, C устройства. Датчик 12 тока якоря двигателя 6 выполняет вспомогательные функции, например токоограничение, т.е. защиту электропривода от перегрузок по току, возникающих при первоначальном запуске двигателя 6 или же при заклинивании приводимого механизма 8. Узел моделирования контура тока, образованный анодной группой вентилей выпрямителя 2, введенной диодной логической схемой ИЛИ и датчиком 13 напряжения электродвигателя, не функционирует, так как в электроприводе имеет место замкнутый силовой контур тока, протекающего от выпрямителей вентильного преобразователя в якорную цепь 6 электродвигателя.
Начало переходного процесса подтормаживания электропривода соответствует уменьшению выходного сигнала узла задания 11, показанного в момент времени t = t1 на фиг. 2, а, на которое ПИ-регулятор 10 также реагирует уменьшением своего выходного сигнала (см. фиг. 2, б при t > t1) с перемещением на новую точку b его состояния, показанную на статической характеристике вход-выход (см. фиг. 2, б). При этом система 9 импульсно-фазового управления тиристорами, связанная входом с выходом ПИ-регулятора 10, также сдвигает в сторону большего запирания импульсы управления тиристоров управляемого мостового выпрямителя 1, что приводит к уменьшению общего выходного напряжения вентильного преобразователя, показанного на фиг. 2, в при t > t1.
Ввиду превышения противо-ЭДС якорной цепи 6 двигателя, величина которой из-за электромеханической инерции агрегата плавно уменьшается под воздействием тормозящего момента статического сопротивления приводного механизма 8 (см. фиг. 2, г при t1 < t < t2), над упомянутой величиной напряжения вентильного преобразователя, запираются силовые диоды катодной группы неуправляемого мостового выпрямителя 2, силовая цепь вентильного преобразователя размыкается и исчезает, спадая до нулевого значения, ток в якорной цепи 6 двигателя (см. фиг. 2, д при t1 < t < t2). В то же время проводимость управляемого мостового выпрямителя 1 и анодной группы вентилей неуправляемого мостового выпрямителя 2 сохраняется, так как введенная диодная логическая схема ИЛИ 16 здесь функционально имитирует проводящее состояние катодной группы неуправляемого мостового выпрямителя 2, чем в итоге моделируется замкнутый контур протекания тока электропривода и работает узел моделирования контура тока, образованный управляемым мостовым выпрямителем 1, анодной группой вентилей неуправляемого мостового выпрямителя 2, диодной логической схемой ИЛИ 16 и датчиком напряжения 13. В результате компенсируется основная нелинейность нереверсивного электропривода, обусловленная односторонней проводимостью его однотактного вентильного преобразователя, управляемость которого сохраняется и на этапе подтормаживания двигателя электропривода при закрытом состоянии катодной группы вентилей неуправляемого мостового выпрямителя 2.
В момент времени t = t2, отмеченный на временных графиках фиг. 2, когда величина противо-ЭДС, подтормаживаемого двигателя 6 сравнивается с величиной выходного напряжения вентильного преобразователя, ранее предварительно достигнутого в соответствии с изменившимся сигналом узла задания 11 под действием узла моделирования контура тока, вновь восстанавливается естественная проводимость вентилей катодной группы неуправляемого мостового выпрямителя 2 и замыкается силовой контур протекания якорного тока двигателя 6, нагружающий вентили преобразователя и обмотки его трансформатора питания 3. При этом ПИ-регулятор 10 электропривода несколько повышает свое выходное напряжение (фиг. 2, б при t > t2), компенсируя внутреннее падение напряжения на силовых элементах вентильного преобразователя, и переходит в новое установившееся состояние, отмеченное точкой с на его статической характеристике вход-выход. Причем благодаря заранее подготовленному действием узла моделирования контура тока состоянию ПИ-регулятора и вентильного преобразователя заключительный, этап переходного процесса подтормаживания и замыкания силовой цепи электропривода в момент времени t ≥t2 протекает максимально быстро, после чего электропривод действует в установившемся режиме работы. При этом в соответствии с уменьшенным значением сигнала узла задания 11 (см. фиг. 2, а при t > t1), имеет место соответственно меньший уровень выходного напряжения вентильного преобразователя 1-2 (см. фиг. 2, в при t > t2), меньшее значение частоты вращения двигателя (см. фиг. 2, г при t > t2) и, например, меньшая величина тока якоря 6 двигателя (см. фиг. 2, д при t > t2), если момент статического сопротивления приводимого механизма 8 снижается с уменьшением его частоты вращения.
Положительный технико-экономический эффект при использовании нереверсивного электропривода заключается в упрощении устройства узла моделирования контура тока, который в большей своей части совмещается с датчиком напряжения электродвигателя; в расширении функциональных возможностей электропривода, который, имея упрощенное исполнение узла моделирования контура тока, позволяет также использовать более простую (чем у прототипа) одноконтурную систему управления однотактным вентильным преобразователем с ее одним общим ПИ-регулятором, параметры которого к тому же не связаны жестко с параметрами двигателя электропривода. Это позволяет в частности использовать предлагаемое устройство в составе испытательных стендов электрических машин различного исполнения без перестройки параметров управляющего ПИ-регулятора электропривода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с управляемым моментом | 1989 |
|
SU1809523A1 |
| Электропривод для подъемной машины с переменными радиусами навивки канатов | 1980 |
|
SU904165A1 |
| ОДНОФАЗНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 1991 |
|
RU2101844C1 |
| Многодвигательный электропривод | 1983 |
|
SU1280690A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Электропривод подъемной машины | 1980 |
|
SU893780A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1973 |
|
SU375743A1 |
| Устройство для управления реверсив-НыМ ВЕНТильНыМ элЕКТРОпРиВОдОМ | 1979 |
|
SU817954A1 |
| ВЕНТИЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ | 2002 |
|
RU2227362C2 |
| Электропривод для подъемной машины | 1983 |
|
SU1159138A1 |
Использование: в электроприводах общепромышленных механизмов. Сущность: данное устройство, имея упрощенное использование узла моделирования контура тока, позволяет использовать простую одноконтурную систему управления однотактным вентильным преобразователем с общим ПИ-регулятором. Параметры регулятора связаны жестко с параметрами двигателя электропривода. 2 ил.
НЕРЕВЕРСИВНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА, содержащий электродвигатель независимого возбуждения, подключенный якорем к выходу вентильного преобразователя, входные цепи которого предназначены для соединения с фазами источника питания переменного тока, систему импульсно-фазового управления, подключенную к выходу регулятора, первые два входа которого соединены соответственно с узлом задания и датчиком тока якоря электродвигателя, а третий - с выходом узла моделирования контура тока, датчик напряжения электродвигателя, подключенный первой входной клеммой к якорю электродвигателя, отличающийся тем, что, с целью упрощения и расширения функциональных возможностей, в него введена диодная логическая схема ИЛИ, а вентильный преобразователь выполнен в виде последовательно соединенных управляемого и неуправляемого мостовых выпрямителей, выход диодной логической схемы ИЛИ подключен к второй входной клемме датчика напряжения электродвигателя, а входы - к входным зажимам переменного тока неуправляемого мостового выпрямителя, при этом управляемый мостовой выпрямитель, анодная группа вентилей неуправляемого мостового выпрямителя, диодная логическая схема ИЛИ и датчик напряжения электродвигателя образуют узел моделирования контура тока, выходом которого является выход датчика напряжения электродвигателя.
| Справочник по проектированию автоматизированного электропривода и систем управления технологическими процессами | |||
| /Под ред | |||
| В.Н.Круповича и др | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| М.: Энергоиздат, 1982, с.199. | |||
