1
Изобретение относится к телевизионной технике и может использоваться в телевизионных системах определения координат наблюдаемых объектов.
Известно координатное устройство, содержащее передающую камеру, расположенную на платформе с блоками стабилизации по X и Y, к выходу которого подключен вход анализатора, первый и второй выходы которого подключены jg соответственно к входам каналов координат по X и Y, каждый из которых состоит из координатного счетчика, выход которого подключен к входу регистра памяти, к другому входу кото- ,j рого подключены последовательно соединенные блок управления, аналогоцифровой преобразователь и датчик угловых перемещений, причем второй выход блока управления соединен с 20 установочным входом координатного счетчика СПОднако vi3BecTHoe координатное устройство имеет низкую точность.
Цель изобретения - повышение точности путем устранения зависимости ошибки измерения координат от часто- ты остаточных колебаний платформы.
Поставленная цель достигается тем, что в известном координатном устройстве в канале координат по У между выходом аналого-цифрового преобразователя и входом блока управления включен регистр памяти поправки, другой вход которого подключен к третьему выходу анализатора, а третий выход блока управления соединен с вторым входом координатного счетчика.
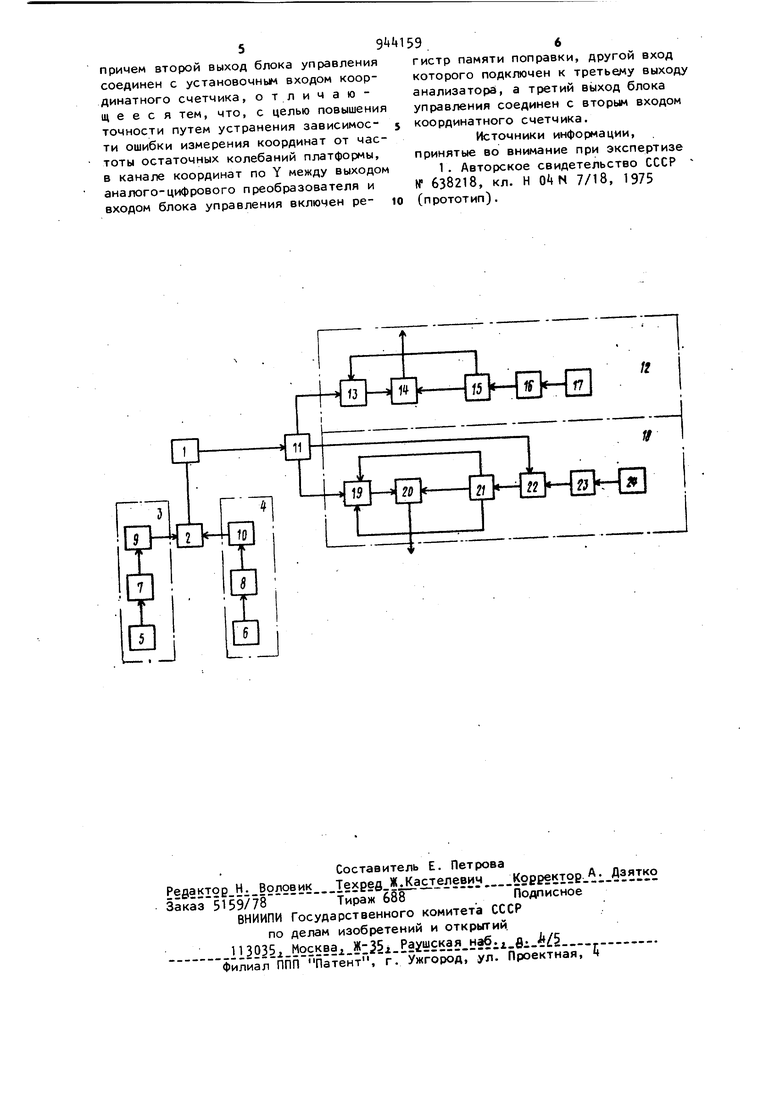
На чертеже представлена структурная схема предложенного устройства.
Координатное устройство содержит передающую камеру 1, платформу 2, два блока 3 и t стабилизации по X и Y соответственно, каждый из которых состоит из датчика, 5 и 6 угловых перемещений , преобразователей 7 и 8 и исполнительных блоков 9 и 10, анализатор 11, канал 12 коор3динат по X, состоящий из координатного счетчика 13. регистра Ц памяти, блока 15 управления, аналого-циф рового преобразователя 16, датчика 17 угловых перемещений, канала 18 координат по Y, состоящего из координатного счетчика 19 регистра 20 памяти,блока 21 управления, регистр 22 памяти поправки, аналого-цифрово преобразователя 23, датчика угло вых перемещений. Устройство работает следующим об разом. Передающая камера 1 установлена на платформе 2, положение которой стабилизируется по координатам X и Y исполнительными блоками 9 и 10 соответственно, которые управляются че рез преобразователь 7 и 8 сигналами от датчиков 5 и 6 угловых перемещеНИИ. Выходной сигнал передающей каме ры 1 обрабатывается анализатором 11 с первого и второго выходов которого на координатные счетчики 13 и 19 соответственно поступают группы им-, пульсов. Количество импульсов в груп пе пропорционально мгновенным значениям координаты X объекта и координаты Y объекта. В конце интервала прямого хода развертки коды координат переносятся в соответствующие регистры I и 20 памяти,после чего коор/ инатные счетчики при отсутствии смещения оптической оси передающей камеры устанавливаются в нуль соответствующими синхронизирующими импульсами, поступающими на их установочные входы от блоков 15 или 21 управления соответственно. При смещении оптической оси передающей камеры 1 вследствие наклона платформы 2, выходной сигнал соответствующего датчика угловых перемещений 17 (2+), преобразований в код поправки соответствующим аналогоцифровым преобразователем 16 или 23, поступает в канале 12 - на вход блока 15 управления,в канале 18 - на вход регистра 22 памяти поправки. В каждом интервале обратного хода по строке в координатный счетчик 13 записывается код поправки, устанавли вающий его в состояние, отличающееся от нулевого в сторону прямого или обратного счета (в зависимости от знака кода поправки) и корректирующий координату X объекта в поле зрения передающей камеры с учетом отклонения ее оптической оси. Коор94динатный счетчик 19 в интервале обратного хода по кадру устанавливается в нуль. В момент фиксации анализатором 11 видеосигнала от объекта, импульс управления с третьего выхода анализатора разрешает перенос в регистр 22 памяти поправки мгновенного значения кода поправки по координате Y. Код поправки хранится до окончания прямого хода кадровой развертки. В начале обратного хода кадровой развертки код поправки через блок 21 управления подается на вход второе слагаемое координатного счетчика 19, суммируется с учетом, знака с записанной в счетчике координатой Y. наблюдаемого объекта и после окончания переходных процессов переносится в регистр 20 памяти при поступлении на вход разрешения записи импульса управления от блока 21 управления. Таким образом, выборка . мгновенного значения кода поп|эав.ки в момент фиксации от объекта ( а не в интервале обратного хода развертки, как в известном устройстве позволяет устранить зависимость ошибки формирования кода поправки от частоты остаточных колебаний платформы в случаях, когда эта часть близка к частоте смены кадров телевизионной системы, или превышает ее (что в реальных условиях при типичных для диссекторного канала значения частоты смены кадров порядка 0,2-0,5 Гц встречается часто), при введении кода поправки в интервале хода ошибка формирования кода поправки достигает амплитуды колебаний платформы, если период кадровой частоты кратен нечетному числу периодов колебаний платформы. Формула изобретения Координатное устройство, содержащее передающую камеру, расположенную на платформе с блоками стабилизации по X и Y, к которой подключен вход анализатора, первый и второй выходы которюго подключены соответственно к входам каналов координат по X и Y, каждый из которых состоит из координатного счетчика, выход которого подключен к входу регистра памяти, к другому входу которого подключены последовательно соединенные блок управления, аналого-цифровой преобразователь и датчик угловых перемещений.
5Э
причем второй выход блока управления соединен с установочным входом координатного счетчика, отличающееся тем, что, с целью повышения точности путем устранения зависимое- 5 ти ошибки измерения координат от частоты остаточных колебаний платформы, в канале координат по Y между выходом аналого-цифрового преобразователя и входом блока управления включен ре- ю
596
гистр памяти поправки, другой вход которого подключен к третьему выходу анализатора, а третий выход блока управления соединен с вторым входом координатного счетчика.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 638218, кл. Н 7/18, 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Телевизионный пеленгатор | 1989 |
|
SU1670805A1 |
| Формирователь сигнала цифровой следящей развертки | 1980 |
|
SU936454A2 |
| Телевизионное устройство измерения координат и скорости | 1983 |
|
SU1107340A1 |
| Формирователь сигнала цифровой следящей развертки | 1978 |
|
SU692111A1 |
| Способ измерения координат центра тяжести изображения и устройство для его осуществления | 1990 |
|
SU1806445A3 |
| Устройство для измерения координат центра тяжести изображения объекта | 1988 |
|
SU1660208A1 |
| Устройство для измерения координатных искажений фокусирующе-отклоняющей системы и передающей электронно-лучевой трубки | 1989 |
|
SU1660212A1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТНЫЙ ДИСКРИМИНАТОР | 1996 |
|
RU2143182C1 |
| Аналитический стереофотограмметрический прибор | 1980 |
|
SU932232A1 |
| Устройство для отображения информации на экране электроннолучевой трубки | 1975 |
|
SU590786A1 |
