(21)4654514/09
(22) 12.01.89
(46) 15.08.91. Бюл. МгЗО
(72) Л.В.Власов, В.Ф.Лебедев, Ю.И.Понашенко, В.Ф.Савик и Г.П.Хабаров
(53)621.397(088.8)
(56)Авторское свидетельство СССР Ns 995377, кл. Н 04 N 7/18. 1980.
(54) ТЕЛЕВИЗИОННЫЙ ПЕЛЕНГАТОР
(57)Изобретение относится к телевидению и может быть использовано для определения угловых координат (пеленга) наблюдаемых объектов и автоматического слежения за ними. Цель изобретения - повышение точности измерения пеленга на наблюдаемый объект путем устранения влияния нестабильности размеров и центровки растра передающей телевизионной камеры. В режиме Калибровка оптический коммутатор 1 проецирует с источника 2 изображения реперных точек опорное изображение на передающую телевизионную камеру 3, с выхода которой видеосигнал с помощью блока 4 подавления фона и бинарного квантователя 5 преобразуется в сигнал, в котором логической единице соответствует реперная точка. Накопительные сумматоры 8 и 9, счетчики 10 и 11 сигнала координат X и Y, блок 13 и блок 14 управления в течение каждого кадра рассчитывают координаты одной ре- перной точки. В режиме Работа аналого- цифровой преобразователь 18, блок 19 памяти и адресный регистр 20 определяют координаты центра объекта, которые на основании информации о координатах реперных точек корректируются в соответствии с параметрами растра. 2 ил.
СО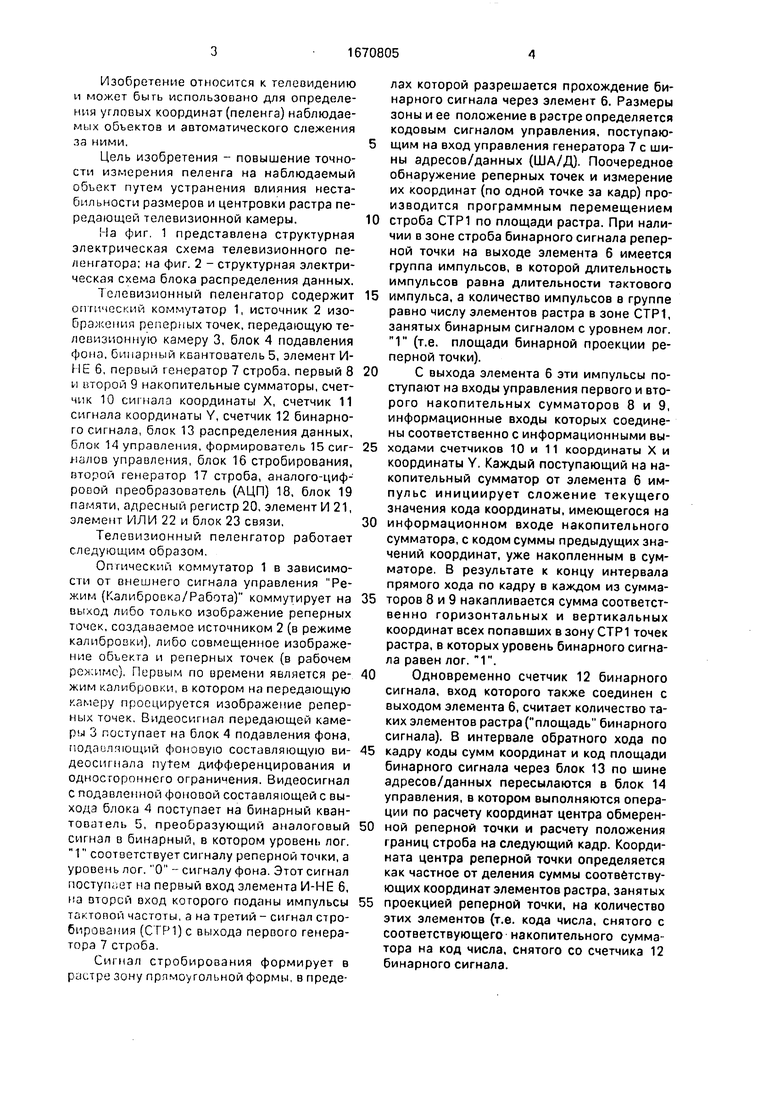
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННЫЙ ПЕЛЕНГАТОР | 2001 |
|
RU2197003C2 |
| Телевизионное устройство измерения координат и скорости | 1983 |
|
SU1107340A1 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| Формирователь стробирующего сигнала | 1987 |
|
SU1467794A1 |
| ТЕЛЕВИЗИОННОЕ СЛЕДЯЩЕЕ УСТРОЙСТВО | 1988 |
|
SU1574152A1 |
| Устройство для автоматической фокусировки электронного луча передающей телевизионной трубки | 1983 |
|
SU1109947A1 |
| УСТРОЙСТВО ДЛЯ СЕЛЕКЦИИ ИЗОБРАЖЕНИЙ И ИЗМЕРЕНИЯ РАЗМЕРОВ ОБЪЕКТОВ | 1998 |
|
RU2163395C2 |
| Устройство для отображения векторов на экране телевизионного приемника | 1977 |
|
SU739591A1 |
| Устройство для определения координат объекта | 1990 |
|
SU1814196A1 |
| Устройство для отображения информацииНА эКРАНЕ ТЕлЕВизиОННОгО пРиЕМНиКА | 1979 |
|
SU842933A1 |
Изобретение относится к телевидению и может быть использовано для определения угловых координат /пеленга/ наблюдаемых объектов и автоматического слежения за ними. Цель изобретения - повышение точности изменения пеленга на наблюдаемый объект путем устранения влияния нестабильности размеров и центровки растра передающей телевизионной камеры. В режиме "калибровка" оптический коммутатор 1 проецирует с источника 2 изображения реперных точек опорное изображение на передающую телевизионную камеру 3, с выхода которой видеосигнал с помощью блока 4 подавления фона и бинарного квантователя 5 преобразуется в сигнал, в котором логической единице соответствует реперная точка. Накопительные сумматоры 8 и 9, счетчики 10 и 11 сигнала координат X и Y, блок 13 и блок 14 управления в течение каждого кадра рассчитывают координаты одной реперной точки. В режиме "работа" аналого-цифровой преобразователь 18, блок 19 памяти и адресный регистр 20 определяют координаты центра объекта, которые на основании информации о координатах реперных точек корректируются в соответствии с параметрами рестра. 2 ил.
Изойрожение ооъехта
I СИ
Ж А
-
Фиг.1
Режим
(рабоякг/ халибрав- xai кн
1
«-
F
Лусх
Шина ad/jecog/ данньи
о VI о
00
о ел
пснм
Изобретение относится к телевидению и может быть использовано для определения угловых координат (пеленга) наблюдаемых объектов и автоматического слежения за ними.
Цель изобретения - повышение точности измерения пеленга на наблюдаемый объект путем устранения слияния нестабильности размеров и центровки растра передающей телевизионной камеры.
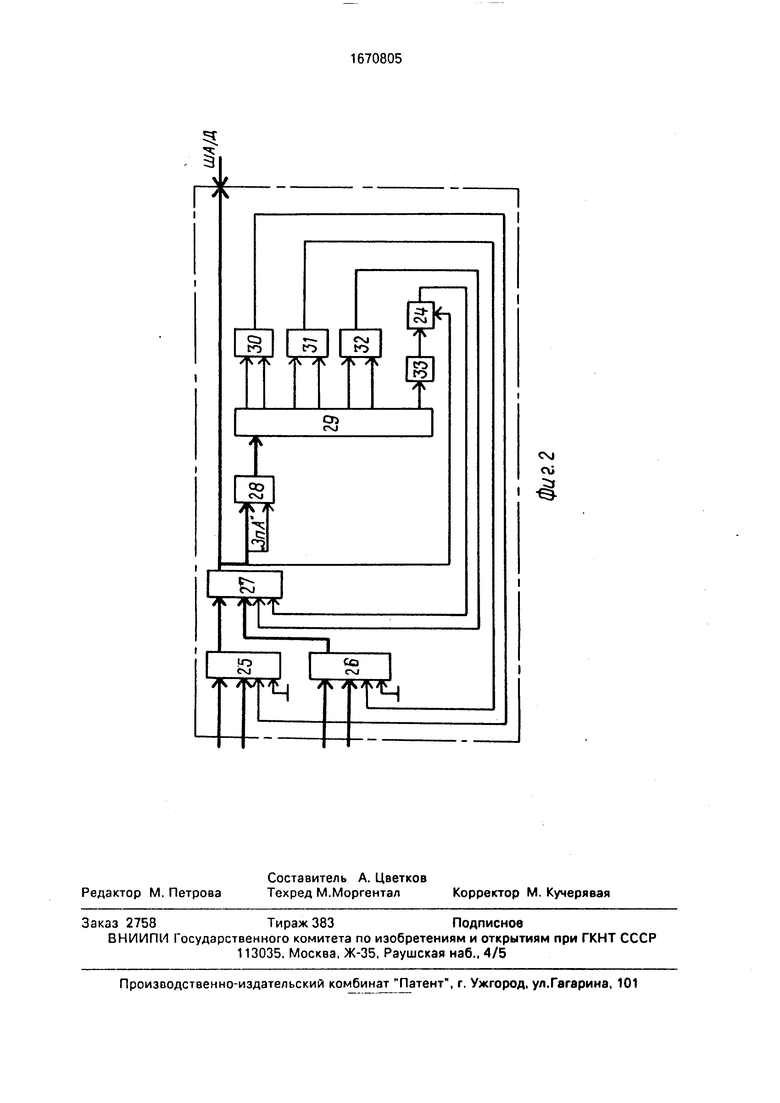
На фиг 1 представлена структурная электрическая схема телевизионного пеленгатора; на фиг. 2 - структурная электрическая схема блока распределения данных.
Телевизионный пеленгатор содержит оптический коммутатор 1, источник 2 изображения реперных точек, передающую телевизионную камеру 3, блок 4 подавления фона, бинарный квантователь 5, элемент И- НЕ 6, первый генератор 7 строба, первый 8 и второй 9 накопительные сумматоры, счетчик 10 сигнала координаты X, счетчик 11 сигнала координаты Y, счетчик 12 бинарного сигнала, блок 13 распределения данных, блок 14 управления, формирователь 15 сиг- .налов управления, блок 16 стробирования, второй генератор 17 строба, аналого-цифровой преобразователь (АЦП) 18, блок 19 памяти, адресный регистр 20, элемент И 21, элемент ИЛИ 22 и блок 23 связи.
Телевизионный пеленгатор работает следующим образом.
Оптический коммутатор 1 в зависимости от внешнего сигнала управления Режим (Калибровка/Работа) коммутирует на выход либо только изображение реперных точек, создаваемое источником 2 (в режиме калибровки), либо совмещенное изображение объекта и реперных точек (в рабочем режиме). Первым по времени является ре- жим калибровки, в котором на передающую камеру проецируется изображение реперных точек. Видеосигнал передающей камера 3 поступает на блок 4 подавления фона, подаолчющий фоновую составляющую ви- деосигнала путем дифференцирования и одностороннего ограничения. Видеосигнал с подавленной фоновой составляющей с выхода блока 4 поступает на бинарный квантователь 5, преобразующий аналоговый сигнал в бинарный, в котором уровень лог. 1 соответствует сигналу реперной точки, а уровень лог. О - сигналу фона. Этот сигнал поступает на первый вход элемента И-НЕ 6, иа второй вход которого поданы импульсы тагтопой частоты, а на третий - сигнал стробирования (СГР1) с выхода первого генератора 7 строба.
Сшнал стробирования формирует в pdC-тре зону прямоугольной формы, в пределах которой разрешается прохождение бинарного сигнала через элемент 6. Размеры зоны и ее положение в растре определяется кодовым сигналом управления, поступающим на вход управления генератора 7 с шины адресов/данных (ША/Д). Поочередное обнаружение реперных точек и измерение их координат (по одной точке за кадр) производится программным перемещением строба СТР1 по площади растра. При наличии в зоне строба бинарного сигнала реперной точки на выходе элемента 6 имеется группа импульсов, в которой длительность импульсов равна длительности тактового импульса, а количество импульсов в группе равно числу элементов растра в зоне СТР1, занятых бинарным сигналом с уровнем лог. 1 (т.е. площади бинарной проекции реперной точки).
С выхода элемента 6 эти импульсы поступают на входы управления первого и второго накопительных сумматоров 8 и 9, информационные входы которых соединены соответственно с информационными выходами счетчиков 10 и 11 координаты X и координаты Y. Каждый поступающий на накопительный сумматор от элемента 6 импульс инициирует сложение текущего значения кода координаты, имеющегося на информационном входе накопительного сумматора, с кодом суммы предыдущих значений координат, уже накопленным в сумматоре. В результате к концу интервала прямого хода по кадру в каждом из сумматоров 8 и 9 накапливается сумма соответственно горизонтальных и вертикальных координат всех попавших в зону СТР1 точек растра, в которых уровень бинарного сигнала равен лог. 1.
Одновременно счетчик 12 бинарного сигнала, вход которого также соединен с выходом элемента 6, считает количество таких элементов растра (площадь бинарного сигнала). В интервале обратного хода по кадру коды сумм координат и код площади бинарного сигнала через блок 13 по шине адресов/данных пересылаются в блок 14 управления, в котором выполняются операции по расчету координат центра обмеренной реперной точки и расчету положения границ строба на следующий кадр. Координата центра реперной точки определяется как частное от деления суммы соответствующих координат элементов растра, занятых проекцией реперной точки, на количество этих элементов (т.е. кода числа, снятого с соответствующего накопительного сумматора на код числа, снятого со счетчика 12 бинарного сигнала.
После снятия информации с накопительных сумматоров и счетчика 12 бинарного сигнала оба сумматора и счетчик обнуляются поступающими на их входы установки нуля импульсами. По прошествии М кадров (М - число реперных точек) в блоке 14 управления накапливается массив координат центров всех реперных точек, имеющихся в поле зрения. Во всех последующих циклах обмера реперных точек процесс их поиска не производится и установка зоны СТР1 производится по данным этого сформированного массива (это относится и к обмеру реперных точек в рабочем режиме).
После сформирования массива координат центров проекций реперных точек определяются координаты проекции оптической оси пеленгатора в растре как среднее арифметическое координат центров всех реперных точек. Эти координаты также заносятся в соответствующие ячейки памяти блока 14 управления, после чего этот блок формирует и выдает на внешние командные устройства через блок 23 связи кодовое слово Калибровка выполнена.
По получении этого кодового слова внешние командные устройства переключают сигнал управления на режим Работа. В этом режиме оптический коммутатор 1 проецирует на оптический вход передающей камеры 3 совмещенное изображение реперных точек и объекта. В этом режиме процедура обмера ремерных точек выполняется в том же объеме и последовательности, как и в режиме калибровки.
Обработка видеосигнала объекта производится следующим образом.
Видеосигнал с подавленной фоновой составляющей с выхода блока 4 подавления фона через блок 16 стробирования, управляемый по второму входу сигналом стробирования (СТР2) с выхода второго генератора 17 строба, поступает на АЦП 18. Поиск видеосигнала объекта о растре производится программным покадровым перемещением СТР2 по площади растра и анализом полученной в каждом положении строба ифор- мации на соответствие критерию обнаружения. АЦП 18 преобразует аналоговый сигнал объекта в цифровую форму, в результате каждому элементу растра в пределах СТР2 приводится в соответствие отсчет - код видеосигнала (Яркость), отображающий значение размаха видеосигнала о данной точке (элементе) растра.
Последовательность отсчетов в порядке их поступления записывается в блок 19 памяти, адресация которого выполняется адресным регистром 20. На счетный вход регистра 20 постугэют тактовые импульсы
и
через последовательно соединенные элемент И 21 (управляемый по второму входу сигналом стробирования СТР2) и элемент ИЛИ 22.
Режим записи в блоке 19 памяти в пределах зоны СТР2 обеспечивается подачей на вход управления записью блока 19 памяти сигнала с инверсного выхода второго генератора 17 строба. Накопленный в блоке
19 памяти массив отсчетов в интервале об- ракного хода по кадру через блок 13 и шину адресов/данных пересылается в блок 14 управления, где выполняются операции обработки этого массива, в частности
суммирование всех отсчетов и сравнение суммы с пороговым значением. Критерием обнаружения видеосигнала объекта является превышение суммой отсчетов порогового значения. При удовлетворении критерия обнаружения определяются координаты центра проекции объекта в зоне СТР2 как частные от деления суммы произведений (координаты растра в стробе на значение отсчета видеосигнала в этом элементе) на
сумму отсчетов:
Хо(2 А,Г
I
XjA,
30
Yo(Z Aj) -2 YjAj;
Координатой элемента растра в стробе в данном случае является адрес соответствующей ячейки памяти в блоке 19 памяти, т.е.
соответствующий этой ячейке памяти код состояния адресного регистра 20.
После расчета координат центра объекта о стробе производится их пересчет в координаты центра объекта в растре (по
известным на анализируемый кадр координатам границ и, соответственно, центра строба в растре), а затем расчет положения зоны СТР2 на следующий кадр, исходя из центрирования строба относительно проекции обьекта.
Затем рассчитываются угловые координаты объекта как разность растровых координат объекта и соответствующих растровых координат центра фигуры, образуемой реперными точками. Вычисленные значения угловых координат объекта (пеленга) через блок 23 связи передаются на внешние командные устройства. По окончании цикла расчетов блок 14 управления через формирователь 15 сигналов управления устанавливает в нуль накопительные сумматоры 8 и 9, счетчик 12 бинарного сигнала и адресный регистр 20. Схема приходит в исходное состояние и готова к приему и обработке информации в следующем телевизионном кадре.
Процессом считывания информации из блока 19 памяти в интервале обратного хода по кадру управляет блок 14 через формирователь 15 сигналов управления: с соединенного с вторым входом элемента ИЛИ 22 выхода формирователя 15 поступают импульсы продвижения адресного регистра 20, блок 19 памяти находится в режиме считывания, поскольку инвертированный сигнал СТР2 на входе управления блока 19 в интервале обратного хода по кадру отсутствует (вследствие блокирования кадровым импульсом в схеме генератора строба прохождения строчных и тактовых продвигающих импульсов на счетчики генератора ).
Блок 13 распределения данных содержит элемент И-НЕ 24, первый, второй и третий мультиплексоры 25, 26 и 27, регистр 28 памяти адреса, дешифратор 29 адреса, первый, второй и третий триггеры 30, 31 и 32 памяти сигналов управления и инвертор 33.
Обращение блока 14 обработки и управления к коммутатору начинается с выставления на шине адресов/данных одного из присвоенных коммутатору адресов, который записывается в регистр 28 импульсом записи адреса ЗпА, поступающим на вход управления записью (D-вход) регистра 28 по отдельному разряду шины ША/Д.
Записанный адрес дешифрируется дешифратором 29 на соответствующем коду адреса выходе которого устанавливается потенциал лог. О, устанавливающий соответствующий триггер памяти (30, 31 или 32) в состояние либо лог. О, либо лог. 1 (в зависимости от того, на какой из установочных входов триггера поступил потенциал лог. О с выхода дешифратора.
Выходы триггеров памяти сигналов управления соединены соответственно с входами управления переключением мультиплексоров. Подача потенциала лог. О на вход управления переключением мультиплексора вызывает подключение к выходу верхнего по схеме входа, подача лог. Г - подключение к выходу нижнего по схеме входа.
Кроме того, для выборки микросхемы (вывода ее из состояния высокоимпеданс- ного выхода в активное состояние) на вход выборки необходимо подать потенциал лог. О. На входы выборки мультиплексоров 25 и 26 этот потенциал подан постоянно. Для выборки мультиплексора 27 необхоимо записать в регистр 28 адрес, соответствующий соединенному с входом инвертора 33 выходу дешифратора адреса 29, а затем подать импульс СчД (считывание данных) по отдельному разряду ША/Д, при этом в течение всего времени длительности импульса СчД мультиплексор 27 находится в активном состоянии, передавая на свой выход
код, присутствующий на том входе, который определен сигналом (логическим уровнем) на входе управления переключением.
Так, если с входами управления переключением мультиплексоров соединены
прямые выходы регистров памяти сигналов управления,то, например, для передачи на выход блок кода с верхнего по схеме входа мультиплексора 26 необходимо установить на шине адресов/данных код адреса, соответствующий соединенному с входом установки нуля триггера 31 выходу дешифратора: записать этот адрес в адресный регистр подачей импульса установить на ША/Д адрес, соответствующий
соединенному с входом установки единицы триггера 32 выходу дешифратора; записать этот адрес в регистр 28 подачей импульса установить на ША/Д код адреса, соответствующий соединенному с инвертором 33 выходу дешифратора; записать этот адрес в регистр 28 подачей импульса ЗпА, подать импульс СчД.
Формула изобретения Телевизионный пеленгатор, содержащий передающую телевизионную камеру, первый и второй синхронизирующие входы которой являются входами соответственно для строчных и кадровых импульсов телевизионного пеленгатора, последовательно
включенные бинарный квантователь и элемент И-НЕ, последовательно соединенные формирователь сигналов управления, адресный регистр, блок памяти и блок распределения данных, блок стробирования,
счетчик сигнала координаты X, счетчик бинарного сигнала, отличающийся тем, что, с целью повышения точности измерения пеленга на наблюдаемый объект путем устранения влияния нестабильности размеров и центровки растра передающей телевизионной камеры, в него введены источник изображения реперных точек, оптически связанный с первым оптическим входом введенного оптического коммутатора, второй оптический вход которого является оптическим входом телевизионного пеленгатора, управляющий вход является входом для выбора режима телевизионного пеленгатора, а оптический выход связан с
оптическим входом передающей телевизионной камеры, блок подавления фона, первый и второй накопительные сумматоры, первый и второй генераторы строба, анало- го-цифровой преобразователь, элемент И, элемент ИЛИ, блок управления, причем выход передающей телевизионной камеры через блок подавления фона подключен к входу бинарного квантователя и к первому входу блока стробирования, выход элемента И-НЕ соединен с входами управления первого и второго накопительных сумматоров и со счетным входом счетчика бинарного сигнала, управляющий вход аналого-цифрового преобразователя является входом для тактовых импульсов телевизионного пеленгатора, сигнальный вход аналого-цифрового преобразователя соединен с выходом блока стробирования, а выход подключен к информационному входу блока памяти, выход первого генератора строба соединен с вторым входом элемента И-НЕ. первый выход второго генератора строба соединен с вторым входом блока стробирования и с первым входом элемента И. второй выход второго генератора строба соединен с входом управления блока памяти, второй выход формирователя сигнала управления подключен к первому входу элемента ИЛИ, второй вход которого соединен с выходом элемента И, а выход - с вторым входом адресного регистра, третий выход формирователя сигнала управления подключен к входам установки нуля первого и второго накопительного сумматоров, выход первого накопительного сумматора подключен к второму, а выход второго накопительного сумматора - к третьему входу блока распределения данных, четвертый вход которого подключен к выходу счетчика бинарного сигнала, вход установки нуля которого соединен с первым выходом формирователя сигналов управления, выход счетчика сигнала
координаты X подключен к сигнальному входу первого накопительного сумматора, выход счетчика сигнала координаты Y подключен к сигнальному входу второго накопительного сумматора, вход-выход блока управления соединен двунаправленной шиной адресов данных с первым входом первого генератора строба, с первым входом второго генератора строба, с входом формирователя сигналов управления, выход которого подключен к входу введенного блока связи, с входом-выходом блока управления, первый вход блока управления является входом для сигнала Пуск телевизионного
пеленгатора, а второй вход подключен к входу выбора режима телевизионного пеленгатора, третий вход элемента И-НЕ, второй вход элемента И, второй вход первого генератора строба, второй вход второго генератора строба и первый вход счетчика сигнала координаты X соединен с входом для тактовых импульсов телевизионного пеленгатора, третий вход первого генератора строба, третий вход второго генератора строба, второй вход счетчика сигнала координаты X и первый вход счетчика сигнала координаты Y подключен к входу для строчных импульсов телевизионного пеленгатора, а четвертый вход первого генератора строба,
четвертый вх од второго генератора строба, второй вход счетчика сигнала координаты Y и третий вход блока управления подключены к входу для кадровых импульсов телевизионного пеленгатора, при
этом шина адресов данных является выходной шиной телевизионного пеленгатора, а выход блока связи - выходом телевизионного пеленгатора.
/Т v / У Ч
en
CvJ
t / S V
10 CM
CO
CSJ
У V / Vk
XJ
OsJ CO
T I