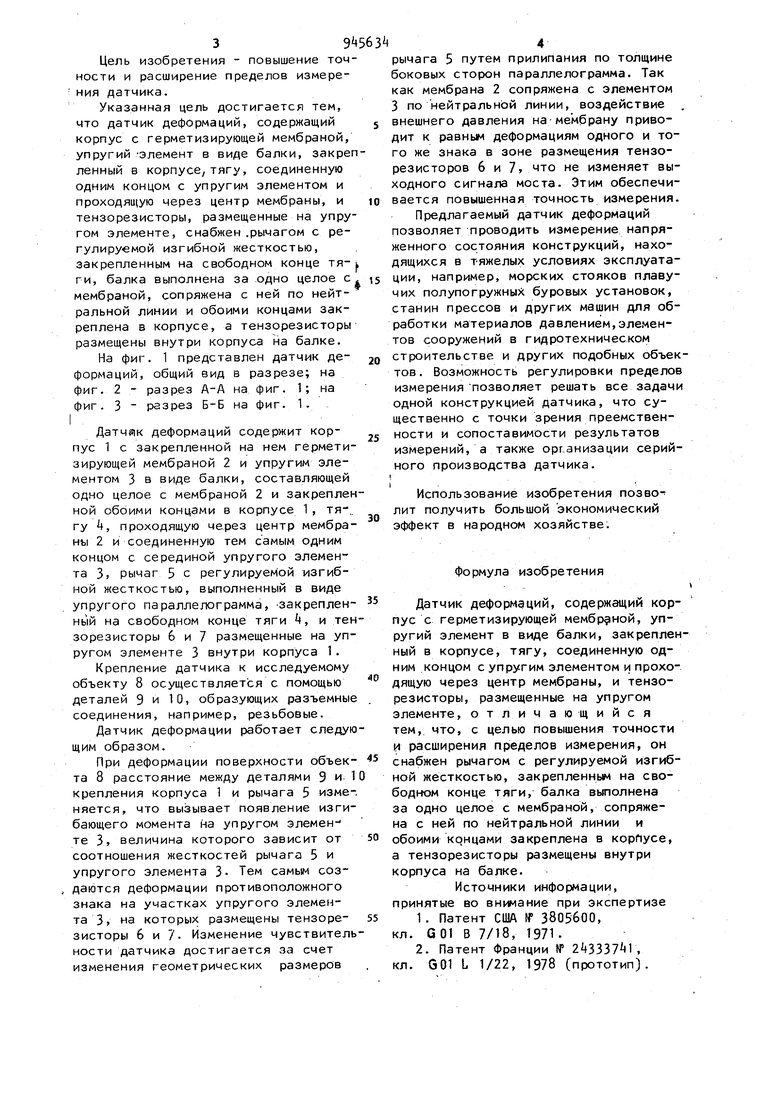
Изобретение относится к измеритель ной технике, а именно к тензометричес КИМ датчикам больших деформаций или перемещений, и может быть (пользовано при измерении деформаций в условиях воздействия больших давлений ере ды, например, в элементах глубоководных аппаратов. Известен датчик деформаций, содержащий корпус с герметизирующим сильфо ном, упругий элемент в виде плоской консольной балки, закрепленной в кор, пус, тягу в виде стрежня, шарнирно закрепленного в корп/се и соединенного с концом балки, и тензорезисторы, размещенные с обеих сторон на балке 1. Однако это устройство имеет низкую точность вследствие того, что сильфон, закрепленный на стержне на некотором расстоянии от шарнирной опоры, при изменении внешнего давления оказывает различное силовое воздействие на балку, а регулировка чувствительности датчика к 11змеряемой деформации возможна лишь в небольшом диапазоне, определяемом предельной длиной тяги. Наиболее близким к изобретению по технической сущности и достигаемому результату является датчик деформа и ций, содержащий корпус с герметизирующей мембраной, упругий элемент в виде консольной балки, закрепленный в корпусе, тягу, соединенную одним концом с ynpyrvw элементом и проходящую через центр герметизирующей мембраны, и тензорезисторы, размещенные с обеих сторон на упругом элёменте 2. Однако датчик имеет невысокую точность вследствие влияния на показания тензометров усилия от мембраны, возникающего при действии на датчик внешнего давления, а пределы измерения дефорнаций ограничены невозможч ностью регулировки длины тяги. 3 э Цель изобретения - повышение точ ности и расширение пределов измерения датчика. Указанная цель достигается тем, что датчик деформаций, содержащий корпус с герметизирующей мембраной, упругий -элемент в виде балки, закре ленный в корпусеутягу, соединенную одним концом с упругим элементом и проходящую через центр мембраны, и тензорезисторы, размещенные на упру гом элементе, снабжен .рычагом с регулируемой изгибной жесткостью, закрепленным на свободном конце тяги, балка выполнена за одно целое с мембраной, сопряжена с ней по нейтральной линии и обоими концами закреплена в корпусе, а тензорезисторы размещены внутри корпуса на балке. На фиг. 1 представлен датчик деформаций, общий вид в разрезе; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1. Датчик деформаций содержит корпус 1 с закрепленной на нем гермети зирующей мембраной 2 и упругим элементом 3 в виде балки, составляющей одно целое с мембраной 2 и закреплен ной обоими концами в корпусе 1 , тя, ГУ , проходящую через центр мембраны 2 и соединенную тем самым одним концом с серединой упругого элемента 3 рычаг 5 с регулируемой изгибной жесткостью, выполненный в виде упругого параллелограмма, -закрепленнь|й на свободном конце тяги , и тен зорезисторы 6 и 7 размещенные на упругом элементе 3 внутри корпуса 1. Крепление датчика к исследуемому объекту 8 осуществляется с помощью деталей 9 и 10, образующих разъемные соединения, например, резьбовые. Датчик деформации работает следую щим образом. При деформации поверхности объекта 8 расстояние между деталями 9 и 1 крепления корпуса 1 и рычага 5 изменяется, что вызывает появление изгибающего момента на упругом элементе 3, величина которого зависит от соотношения жесткостей рычага 5 и упругого элемента 3- Тем самым создаются деформации противоположного знака на участках упругого элемента 3, на которых размещены тензорезисторы 6 и 7. Изменение чувствитель ности датчика достигается за счет изменения геометрических размеров рычага 5 путем прилипания по толщине боковых сторон параллелограмма. Так как мембрана 2 сопряжена с элементом 3 по нейтральной линии, воздействие внешнего давления на/мембрану приводит к равным деформациям одного и того же знака в зоне размещения тензорезисторов 6 и 7 что не изменяет выходного сигнала моста. Этим обеспечивается повышенная точность измерения. Предлагаемый датчик деформаций позволяет проводить измерение напряженного состояния конструкций, находящихся в тяжелых условиях эксплуатации, например, морских стояков плавучих полупогружных буровых установок, станин прессов и других машин для обработки материалов давлением,элементов сооружений в гидротехническом строительстве и других подобных объектов. Возможность регулировки пределов измеренияпозволяет решать все задами одной конструкцией датчика, что существенно с точки зрения преемственности и сопоставимости результатов измерений, а также организации серийного производства датчика. . . Использование изобретения позволит получить большой экономический эффект в народном хозяйстве. Формула изобретения Датчик деформаций, содержащий корпус с герметизирующей мембраной, упругий элемент в виде балки, закрепленный в корпусе, тягу, соединенную одним концом с упругим элементом и проходящую через центр мембраны, и тензорезисторы, размещенные на упругом элементе, отличающийся тем, что, с целью повышения точности и расширения пределов измерения, он снабжен рычагом с регулируемой изгибной жесткостью, закрепленным на свободном конце тяги, балка выполнена за одно целое с мембраной, сопряжена с ней по нейтральной линии и обоими концами закреплена в корпусе, а тензорезисторы размещены внутри корпуса на балке. Источники информации, принятые во внимание при экспертизе 1 . Патент США fP 3805бОО, кл. G01 В 7/18, 1971 . 2. Патент Франции № 2+3337 1 , кл. G01 L 1/22, 1978 (прототип).
9 4563
-rl
ФагА
| название | год | авторы | номер документа |
|---|---|---|---|
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2024 |
|
RU2823571C1 |
| ДАТЧИК ДАВЛЕНИЯ | 1995 |
|
RU2082128C1 |
| Манометр | 1978 |
|
SU737797A1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК СИЛЫ | 2010 |
|
RU2437070C2 |
| ДАТЧИК СИЛЫ | 1992 |
|
RU2069326C1 |
| ТЕНЗОРЕЗИСТОРНЫЙ ДАТЧИК ДАВЛЕНИЯ | 2003 |
|
RU2235981C1 |
| Датчик давления | 1989 |
|
SU1728686A1 |
| ДАТЧИК РАЗНОСТИ ДАВЛЕНИЙ ГАЗОВОЗДУШНЫХ СРЕД | 1990 |
|
RU2026541C1 |
| Тензометрический датчик давления | 1986 |
|
SU1420400A1 |
| ДАТЧИК ДАВЛЕНИЯ | 1998 |
|
RU2166741C2 |

Фи&.3
