Изобретение относится к контрольно-измерительной технике и может быть использовано, в частности, для измерения линейных перемещений.
Известны трансформаторные дифференциальные датчики перемещений, содержащие магнитопровод с размещенными в нем обмоткой возбуждения и секциями вторичной (измерительной) обмотки, соединенными встречно-последовательно, и подвижный ферромагнитный элемент 1.
Недостатком их является наличие некоторого силового воздействия датчика на контролируемый объект, обусловленного магнитным притяжением подвижного ферромагнитного элемента датчика к его магнитопроводу,
Наиболее близким техническим решением к изобретению является датчий перемещений, содержащий ферромагнитный корпус с установленными внутри него двумя относительно подвижными Ш-образными магнитопроводами, обращенными один к другому своими разомкнутыми стержнями,и обмотки,размещенные на стержнях магнитопроводов. Корпус выполнен неразъемным 2.
Недостатком его является большое измерительное усилие, обусловленное
теми же причинами, которые были ука.заны выше.
Цель изобретения - уменьшение измерительного усилия, оказываемого датчиком на контролируемый объект.
Для достижения поставленной цели датчик перемещений, содержащий ферромагнитный корпус с установленными внутри него двумя относительно подвиж10ными Ш-образными магнитопроводами, обращенными один к другому своими разомкнутыми стержнями, и обмотки, размещенные на стержнях магнитопроводов, снабжен обмоткой электромагнита,
15 а корпус выполнен в виде двух стаканов, входящих один в другой с возможностью относительного перемещения, один из которых выполнен с фланцем, а другой - с кольцевой полостью для
20 размещения в ней обмотки электромагнита, находящейся на торце стакана, обращенном к фланцу первого стакана.
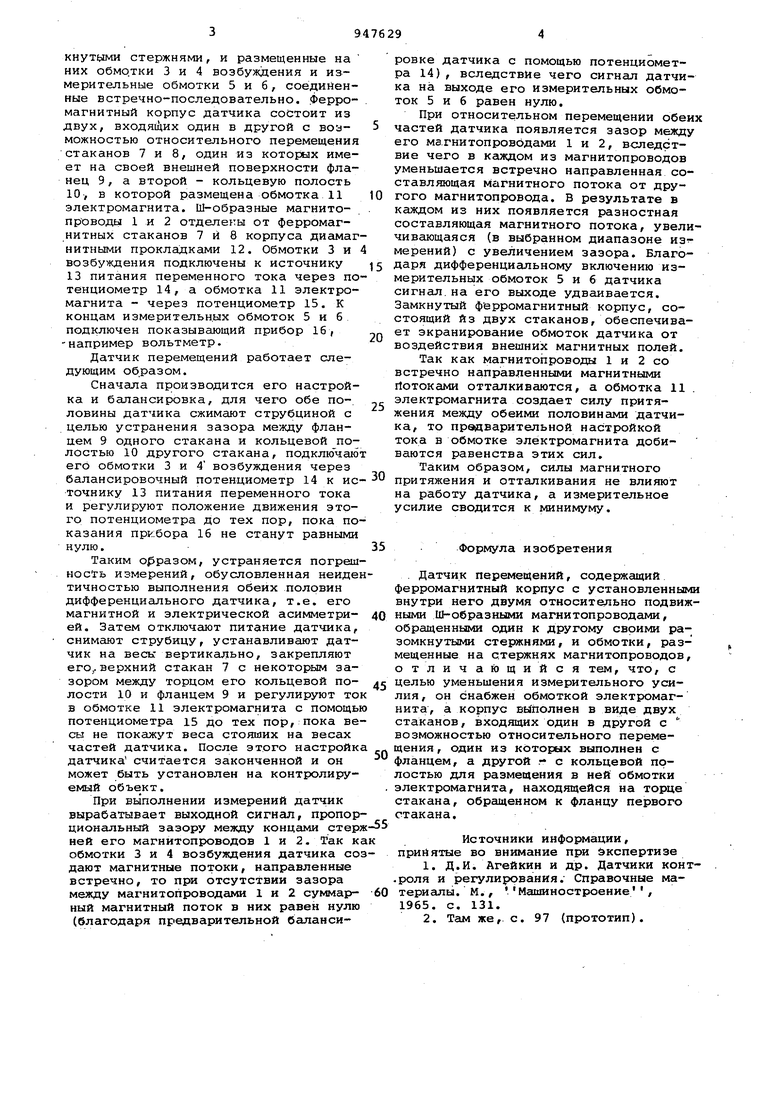
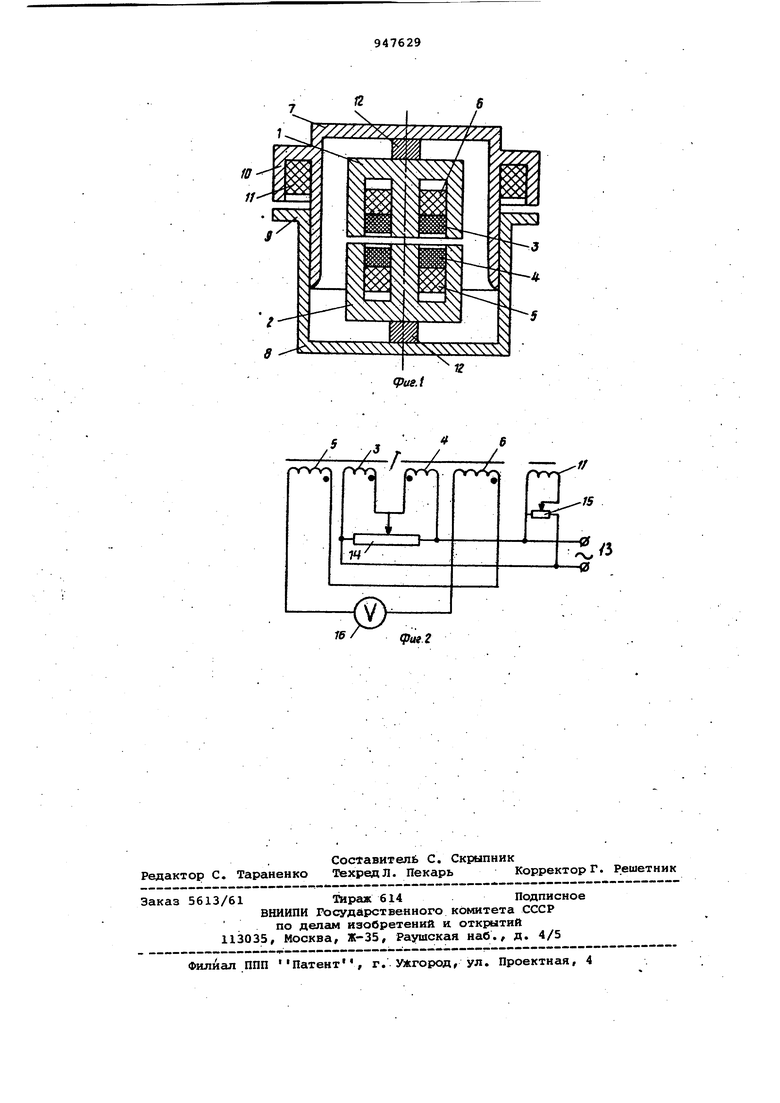
На фиг. 1 представлена конструктивная схема датчика перемещений;
25 на фиг. 2 - электрическая схема включения его обмоток.
Датчик перемещений содержит два Одинаковых Ш-образных (или чашеобразных) магнитопровода 1 и 2, обращенных один к другому своими разомкнутыми стержнями, и размещенные на них обмотки 3 и 4 возбуждения и измерительные обмотки 5 и б, соединенные встречно-последовательно. Ферромагнитный корпус датчика состоит из двух, входя1г;их один в другой с возможностью относительного перемещения стаканов 7 и 8, один из которых имеет на своей внешней поверхности фланец 9, а второй - кольцевую полость 10, в которой размещена обмотка 11 электромагнита, Ш-образные магнитопроводы 1 и 2 отделе ты от ферромагнитных стаканов 7 и 8 корпуса диамаг нитными прокладками 12. Обмотки 3 и возбуждения подключены к источнику 13 питания переменного тока через по тенциометр 14, а обмотка 11 электромагнита - через потенциометр 15. К концам измерительных обмоток 5 и б подключен показывающий прибор 16, -например вольтметр. Датчик перемещений работает следующим образом. Сначала производится его настройка и балансировка, для чего обе по-. ловины датчика сжимают струбциной с целью устранения зазора между фланцем 9 одного стакана и кольцевой полостью 10 другого стакана, подключаю его обмотки 3 и 4 возбуждения через балансировочный потенциометр 14 к ис точнику 13 питания переменного тока и регулируют положение движения этого потенциометра до тех пор, пока по казания пркбора 16 не станут равными нулю. Таким орразом, устраняется погреш ность измерений, обусловленная неиде тичностью выполнения обеих половин дифференциального датчика, т.е. его магнитной и электрической асимметрией. Затем отключают питание датчика, снимают струбицу, устанавливают датчик на весь- вертикально, закрепляют его,, верхний стакан 7 с некоторым зазором между торцом его кольцевой полости 10 и фланцем 9 и регулируют то в обмотке 11 электромагнита с помощь потенциометра 15 до тех пор, пока ве сы не покажут веса стояших на весах частей датчика. После этого настройк датчика считается законченной и он может быть установлен на контролируемый . При выполнении измерений датчик вырабатывает выходной сигнал, пропор циональный зазору между концами стер ней его магнитопроводов 1 и 2. Так к обмотки 3 и 4 возбуждения датчика со дают магнитные потоки, направленные встречно, то при отсутствии зазора между магнитопроводами 1 и 2 суммарный магнитный поток в них равен нулю (благодаря предварительной балансировке датчика с помощью потенциометра 14), вследствие чего сигнал датчика на выходе его измерительных обмоток 5 и 6 равен нулю. При относительном перемещении обеих частей датчика появляется зазор между его ма.гнитопровбдами 1 и 2, вследствие чего в каждом из магнитопроводов уменьшается встречно направленная составляющая магнитного потока от другого магнитопровода. В результате в каждом из них появляется разностная составляющая магнитного потока, увеличивающаяся (в выбранном диапазоне из мерений) с увеличением зазора. Благодаря дифференциальному включению измерительнь1х обмоток 5 и 6 датчика сигнал, на его выходе удваивается. Замкнутый ферромагнитный корпус, состоящий из двух стаканов, обеспечивает экранирование обмоток датчика от воздействия внешних магнитных полей. Так как магнитопроводы 1 и 2 со встречно направленными магнитными йотоками отталкиваются, а обмотка 11 . электромагнита создает силу притяжения между обеими половинами датчика, то прояварительной настройкой тока в обмотке электромагнита добиваются равенства этих сил. Таким образом, силы магнитного притяжения и отталкивания не влияют на работу датчика, а измерительное усилие сводится к минимуму. Формула изобретения . Датчик перемещений, содержащий ферромагнитный корпус с установленными внутри него двумя относительно подвижными Ш-образными магнитопроводами, обращенными один к другому своими разомкнутыми сте иснями, и обмотки, размещенные на стержнях магнитопроводов, отличайщийся тем, что/ с целью уменьшения измерительного усилия, он снабжен обмоткой электромагнита, а корпус выполнен в виде двух стаканов, входящих один в другой с возможностью относительного перемещения, один из которых выполнен с фланцем, а другой . с кольцевой полостью для размещения в ней обмотки электромагнита, находящейся на торце стакана, обращенном к фланцу первого стакана. Источники информации, прийятые во внимание при экспертизе 1,Д,И, Агейкин и др. Датчики конт.роля и регулирования. Справочные материалы. М., Машиностроение, 1965. с, 131, 2,Там же, с, 97 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ПЕРЕМЕЩЕНИЙ ТРАНСФОРМАТОРНОГО ТИПА | 1991 |
|
RU2031358C1 |
| Поплавковый индуктивный уровнемер | 1980 |
|
SU916995A1 |
| Трансформаторный датчик линейных перемещений | 1981 |
|
SU994908A1 |
| Электродвигатель | 1988 |
|
SU1658284A1 |
| Преобразователь линейных перемещений валв в электрический сигнал | 1973 |
|
SU486341A1 |
| ИНДУКЦИОННЫЙ ДАТЧИК ПОЛОЖЕНИЯ | 1972 |
|
SU427365A1 |
| Электродвигатель-маховик с электромагнитным подвесом ротора | 1981 |
|
SU964883A1 |
| ПОДШИПНИК СИСТЕМЫ ЭНЕРГОНЕЗАВИСИМОГО АКТИВНОГО МАГНИТНОГО ПОДВЕСА РОТОРА | 2003 |
|
RU2246644C1 |
| Бесконтактный преобразователь угла поворота с сосредоточенными обмотками | 1985 |
|
SU1328887A1 |
| Электромагнитный датчик для контроля металлических изделий | 1982 |
|
SU1068190A1 |
16
tpta2
