. Изобретение относится к электротехнике, в частности к электрическим машинам и электромеханическим устройствам с бесконтактной коммутацией.
Известны электродвигатели с вентильной коммутацией, в конструкций которых применены системы электромагнитного подвеса ротора,- в частности, с использованием сочетания постоянных магнитов на роторе и электромагнитов на статоре 1.
Однако этот электродвигатель не может обеспечить полную электромагнитную подвеску ротора.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является электродви- , гатель, в котором применены высокоэрцитивные пoctoянныe магниты на роторе и на статоре, а для подвеса ротора используются силы отталкивания постоянных магнитов. .Электродвигатель содержит статор с П-образными в аксиальной плоскости магнитопроводами, в полюсных выступг1х которых закреплены постоянные магниты, и помещенными н.а них катушками, соединенными в сект ции и подключенными к источнику питания через вентильный коммутатор, и potop, активная часть которого выполнёна в виде ферромагнитных сегментов, разделенных немагнитными промежутками. В пазах ферромагнитных сегментов также помещены постоянные магниты, причем постоянные магниты ротора и статора обращены друг к другу одноименными полюсами.
Достоинством примененной здесь системы подвеса ротора с использованием
10 электромагнитных сил отталкивания является простота и надежность устойчивость при радиальных смещениях ротора без применения внешних устройств автоматического регулирования вели15чины воздушного зазора,-отсутствие потребления энергии 2.
Однако подобная система подвеса ротора имеет и весьма существенные недостатки. Первый из них состоит в том,
20 что в качестве радиальной центрирующей силы здесь используется разность сил отталкивания диаметрально расположенных . постоянных магнитов, которая возникает лишь при существенно эк25сцентрическом положении оси вращения ротора по отношению к оси статора.
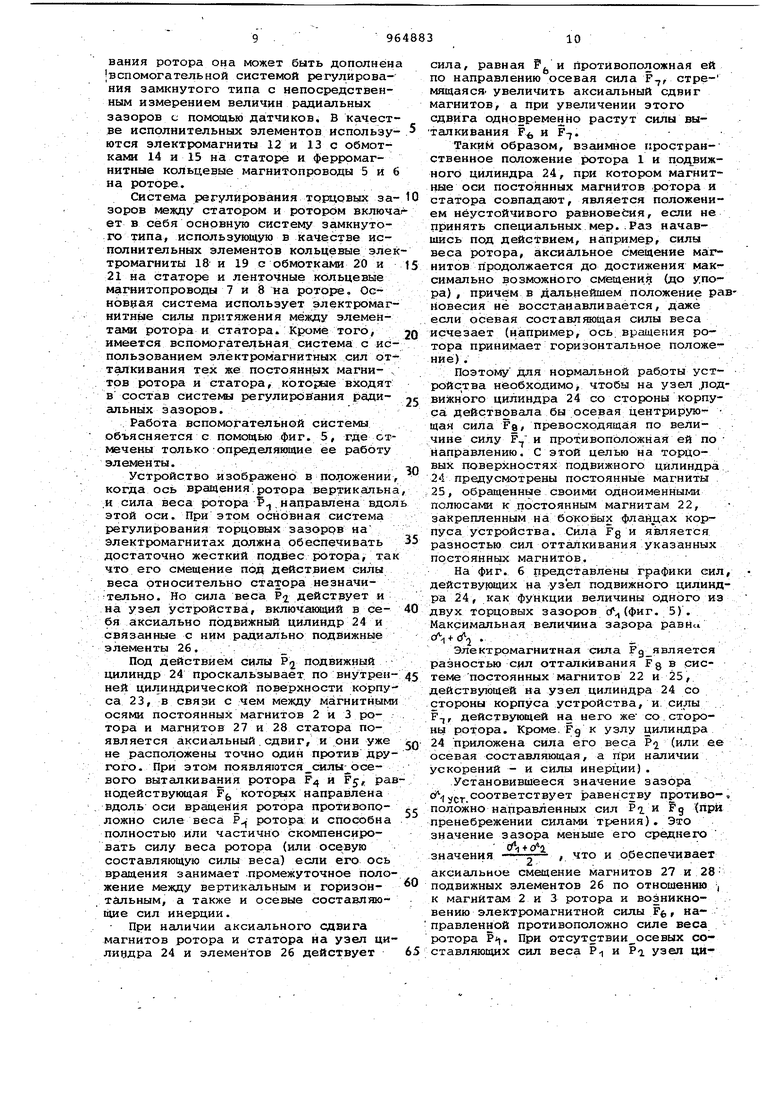
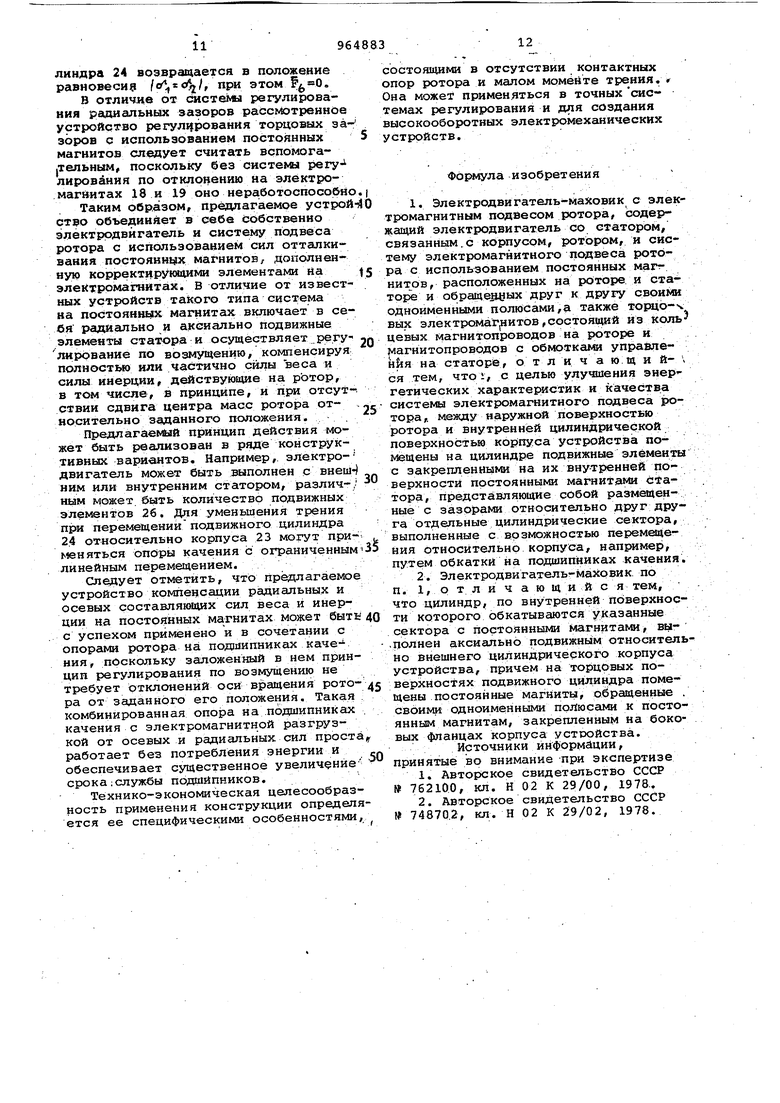
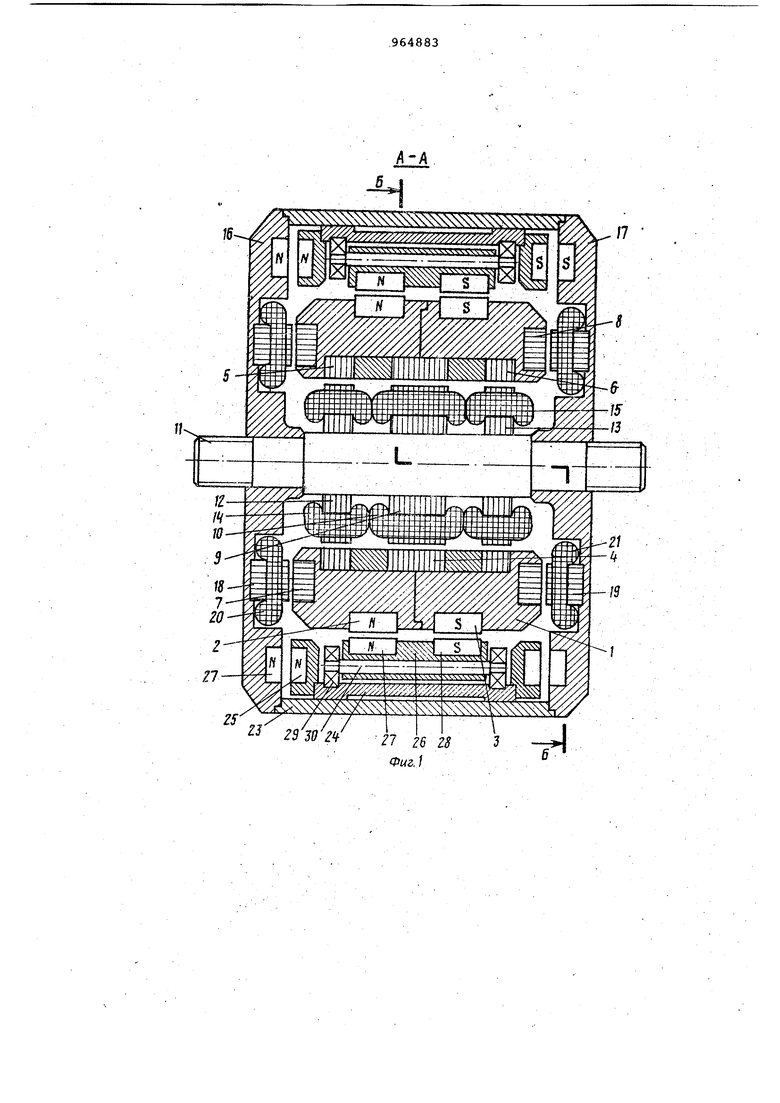
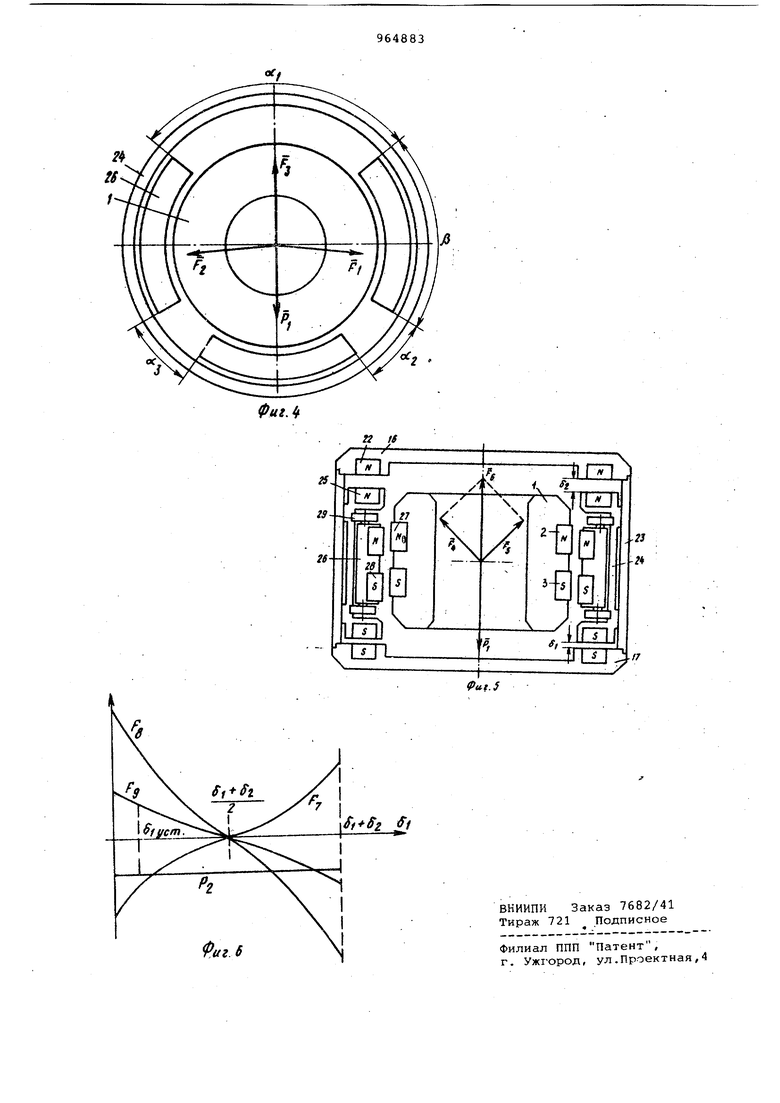
Таким образом, система не обеспечивает достаточной жесткости и точ- ности подвеса ротора, т.е. в большин30стве случаев не удовлетворяет требрваниям к такого рода устройствам.Пра тически почтя ничего .ие дает и приме нение какой-либо вспомогательной сие темы центрирования ротора,например,с использованием электромагнитных сил притяжения Ферромагтнитной массы к электромагниту. такая система Обеспечит центрирование ротора с дос таточнЬ высокой точностью. То станут очень малыми разностные центрируклцие усилия отталкивания диаметрально рас положенных постоянных магнитов, так что они будут не в состоянии компенсировать ХОТ9 бы частично силу веса ротора. В таком случае предполагаема вспомогательная система подвеса на самом деле выполняет функцию основной с затратой значительной электрической энергии, а система подвеса на постоянных магнитах становится даже не вспомогательной, а скорее резервной. Второй недостаток состоит В том, что при всяком осевом (аксиальном) смещении ротора в сторону от положения равновесия возникают достаточно болыние электромагнитные усилия, выталкивающие ротор из статора. Следовательно, необходимо предусмотреть дополнительную систему стаби лизации торцовых зазоров между ротором и статором, например, с примене нием электромагнитов, управляемых с помощью датчиков зазора.Такая систем должна обеспечивать достаточно большие электромагнитные усилия, так как в ее функцию входит не только компен сация силы веса ротора при вертикаль ном положении оси вращения и сил инерции, связанных с наличием осевых ускорений, но также и компенсация указанных довольно значительных элек тромагнитных сил выталкивания ротора Таким образом, обеспечивая устойчивое, хотя и не слишком ;гочное регулирование зазоров между статором и ротором при радиальных смещениях . ротора, рассмотренная система подвеса на постоянных магнитах создает, существенные помехи в работе устройств, обеспечивающих регулирование торцовых зазоров. Целью изобретения является улучшение энергетических характеристик и качества системы электромагнитного подвеса ротора, использующей силы отталкивания постоянных магнитов. Указанная цель достигается тем, что в конструкции с расположением по стоянных Магнитов на роторе и статоре , обращенных -Друг к другу своими одноименными полюсами, и использованием торцовых электромагнитов на ста торе и кольцевых магнитопроводов на роторе, между наружной поверхностью ротора и внутренней цилиндрической поверхностью корпуса устройства помещены подвижные элементы с закрепле ными на их внутренней поверхности постоянными магнитами статора. Подвижные элементы представляют собой размещенные с зазорами относительно друг друга отдельные цилиндрические сектора, свободно перемещаю- / щиеся относительно корпуса, например, путем обкатки на подшипниках качения. Цилиндр, по внутренней поверхности которого обкатываются указанные сектора с постоянными Магнитами, может быть выполнен аксиально подвижным относительно внешнего корпуса устройства. На торцовых поверхностях подвижного цилиндра помещены постоянные магниты, обращенные своими одноименньши полюсами к постоянным магнитам, закрепленным на боковых фланцах, корпуса устройства. Таким образом, данное электромеханическое устройство объединяет в себе собственно электродвигатель и систему подвеса ротора с использованием электромагнитных сил отталкивания одноименных полюсов высокоэрцитивных постоянных Магнитов, дополнительную корректирующей системой с использованием электромагнитов. Решаемая с помощью предлагаемой конструкции задача заключается в компенсации с помощью электромагнитных сил отталкивания силы веса ротора и -. сИл инерции, независимо от направления действия этих сил по отношению к оси вращения ротора. На фиг., 1 схематически представлено предлагаемое устройство, сечение А-А.на фиг. 2 на фи.г. 2 - сечение Б-Б на фиг. 1; на фиг. 3 и 4 - схема образования радиальных составляющих электромагнитных сил отталкивания соответственно, при осевом и радиальном направлениях действия силы веса; на фиг 5 - схема образова ния осевых составляющих электромагнитных сил отталкивания при осевом направлении действия Силы веса; на фиг. 6 - графики осевых составляющих электромагнитных сил и силы веса, как функции торцового зазора между аксиально подвижным цилиндром и корпусом устройства. Ротор 1 электродвигателя (фиг.15) выполнен в виде цилиндрического тела, например из ферромагнитного материала, на внешней поверхности которого в пазах помещены равномерно распределенные по окружности ротора постоянные магниты 2 и 3 (фиг. 1,2 и 5). Все магниты 2 обращены наружу CBOHNM одноименными полюсами. Ангшотично, но другими полюсами обращены наружу все магниты 3. На внутренней поверхности ротора в пазах набранные из кольцевых Пластин магнитопроводы: магни- топровод 4 ротора собственно электродвигателя (фиг. 1 и 2) и магнитопроводы 5 и 6 корректирующей системы электромагнитного подвеса ротора (фиг.1). В торцовых пазах ротора зак ,реплены витые кольцевые магнитопроводы 7 и 8 (фиг. 1), принадлежа&дае систеью регулирования торцового зазора. На фиг. 1 и 2 представпена конструкция электродвигателя с внешним ро тором и внутренним статоромг наиболее характе рная дпя двигателя-маховика. Магнитопродод 9 статора .собственно электродвигателя с обмоткой 10 размещен на неподвижной оси 11 (фиг. и 2)t тем же помещены магнитопроводы 12 и 13 с обмотками 14 и 15 (№г. 1) составляющие совместно с кольцевыми магнитопроводаяо 5 и 6 ротора электромагниты корректирукицей системы по веса.. . - ..,...,, ., Иа оси 11 помещены также боковые фланцы 16 и 17 (фиг. 1,2 и 5) с закрепленными на них витыми магнитопроврдами 18 и 19 с об юткамй 20 и 21 (фиг. 1и 2), составляющие совместно с магнитопроводами 7 и 8 ротора элек тромагниты системы регулирования тор цового зазора. К этой же системе относятся и распопоженйые в пазах флан цев постоянные магниты 22 (г. 1, 2 и 5). Фланцы 16 и 17 жестко соединены с внзиним цилиндрическим корпу.сом 23 (фиг. 1,2 и 5). Внутри него нахсздится аксиально подвижный цилинд 24 (фиг. 1-5), свободно скользящий по внутренней цилиндрической поверхности корпуса 23, На торцовых поверхностях подвижного цилиндра закреплены постоянные магниты 25 (фиг. 1 и 5), расположенные напротив помещенных на фланцах постоянных магнитов 22 и обращенные к ним одноименными полюсами. По внутренней поверхности цилиндра 24 свободно обкатываются подвижные элементы 26 (фиГ. 1-5), представ ляющие собой размещенные с зазорами относительно Друг друга отдельные цилиндрические сектора с закрепленными на их внутренней поверхности постоянными магнита «1 27 и 28 (фиг.1 ; 2 и 5), обращенные к постоянным магнитам 2 и 3 ротора одноименными полюсами. Обкатка осуществляется, например, ; с помощью подшипников 29 качения (фиг. 1 н 5) малого диаметра, посаженных на оси 30 (фиг. 1 и 2), Подшипники размещены в специальных канавках подвижного цнлиндра 24, что и ключает осевые перемещения подвижных элементов 26 относительно цилиндра 24. Осевые перемещения одновременно , всех секторов возможны только .вместе с цилиндром 24, скользящим относител но корпуса 23. В конструкции применено три подвижных элемента 26. Принципиальное число их не ограничено и может б1ыть существенно большим, что приводит, однако к определенному усло нению конструкции. Электродвигатель-маховик с .электромагнитный подвесом ротора работает следукяцим p6pa3bh4. . Электродвигатель с внутренним статоро 9 и внешним магнитопроводом- 4 ротора обеспечивает, крутящий момент ротора, преодолевающий момент сопро:тивления, который в данном.случае сводится к моменту трения ротора о воздух. Момент сопротивления может быть существенно уменьшен, например, при заполнении внутренней полости устройства аргоном. Требования к электродвигателю сво-: дятся к тому, что он должен быть бесконтактным, по возможности не иметь обмоток на роторе и не создавать значительных сил одностороннего притЯжения между ротором и статором, мешающих работе системы подвеса ротора. Можно применить вентильный электродвигатель с бесконтактной коммутацией, а если нет необходимости в регулировании скорости - асинхронный двигатель, например, с омедненным или массивным ферромагнитньш ротОром, или гистерезисньй электродвигатель. Система эЛектрюмагнИтного подвеса ротора функционально разделяется на систему регулиро1вання радиальных зазоров и систему регулирования торцовых зазоров между ротором и статором. Система регулирования радиальных зазоров, в свою очередь, .состоит из основной системы с использованием электромагнитных сил отталкивання высококоэрцитивных постоянных магнитов н корректирующей сйстейы с исгользованием сил притяжения ферромагнитного тела к эд ектромагниту с регулируемым током в обмотке.. Система регулирования радиальных воздушных :зазоров с использованием постоянных магнитов включает в себя ротор 1, Подвижные элементы 26 и цилиндр 24, являющийся для них опорой. Элементы 26 прижаты к цилиндру 24 .. подшипниками 29 главным образом силами отталкивания одноименных полюсов постоянных магнитов 2 и 3 ротора и магнитов 27 и 2В, закрепленных на cav мих подвижных магнитах. Если ципиндр 24 выполнен из ферромагнитного материала, то следует у читывать еще силы притяжения магнитов 27 и 28 к цилиндру 24; Однако силы, прижимающие элементы 26 к внутренней поверхности цилиндра 24., практически не мешают свободной обкатке элементов 26 по поверхности цилиндра. ; Основные принципы работы система на постоянных магнитах показаны на фиг. 3 и 4, где схематически изображены только те элементы конструкции, которые имеют отнсмиение к работе этой системы. Если сила веса ротора направлена по оси вращения (вертикальное располо жение оси), то и силы веса, действующие на подвижные элементы 26, имеют то же направление и уравновешиваются реакцией опоры. Поскольку Между элементаки 26 действуют значительные силы бокового отталкивания, закрепленных на них по- стоянных магнитов 27 и 28, подвижные элементы располагаются симметрично,с одинаковыми угловыми расстояниями меж ду ними . . , где ( - угол сектора подвижного элемента (фиг.З). Ранодййствующая электромагнитных СИЛ F, Р, Fj отталкивания ротора 1 от подвижных элементов 26, приведенная к центру масс ротора, при равнхэмерном зазоре между ротором и элементамИ 26 равна нулю. Но в такрм положении ротора равна нулю :И радиальная составляющая его веса. Сила отталкивания начинает действовать на ротор лишь при эксцент1«чном положении осИ| вращения ротора относительно оси цилиндра 24, т.е. при неравномерных радиальных зазорах.,: При горизонтальном положении оси вращения ротора (фит. 4) сила веса ротора Р имеет только радиальную составляющ то. Но такое же направление имеют и силы веса подвижных элементов 26, которые заставляют их принять асимметричное положение, при котором, например, . . . В этом случае равнодействующая радиальная сила отталкивания уже не рав на нулю, она противоположна по напр1авлению силе веса ротора Р. Размеры и весовые показатели элементов систегфл могут быть так рассчитаны, что равнодействующая электромаг нитных сил отталкивания будет равна и противоположена по направлению Р., полностью компенбируя вес ротора даже и при равномерных зазорах между ро- ./ тором и элементами 26, -Очевидно, что на ротор в этом случае действует по существу не разностная, а односторон няя сила отталкивания, так как благодаря б®льшому углу раскрытия bt эле ментов 26.в верхней части над ротором нет постоянных-магнитов статора. Напротив, если цилиндр 24 выполнен из ферромагнитного материала, в верхней зоне действуют односторонние силы притяжения магнитов ротора к ,цилиндру 24, также содействующие компенсации какой-то части силы веса ротора. Из-за большого зазора между ротором и цилиндром 24 силы невелики и мало зависят от допустимых изменений этого зазора, и поэтому-могут, считаться по существу при данном зна1чении ot-, постоянными составляющими электромагнитного усилия. Если ось вращения ротора занимает какое-то промежуточное положение между горизонтальным и вертикальным, то сила веса ротора имеет и радиальную, и остевую составляющие. При этом, если обеспечена компенсация силы веса ротора при горизонтальном направлении оси вращения , то автоматически обеспечивается также компенсация радиальной составляющей силы веса ,к при все.х других пространственных положениях оси вращения, поскольку при изменении этого положения изменяется и соотношение угловых расстояний oL, ot2;: 063между элементами 26, а следовательно, и величина равнодействующей электромагнитной силы отталкивания. Предлагаемая система способна компенсировать не только силу веса ротора,. но и радиальные составляющие сил инерции, связанные с наличием ускорений, поскольку подобные силы действуют одновременно и на ротор, и на подвижные элементы 26, заставляя их принимать соответствующие пространственные положения относительно ротора. С истема ре.гулирования радиальных воздушных зазоров на постоянных магнитах исп зльзует, по существу, соче-1 тание двух пРииципОВ регулирования. . С одной стороны, она является системой автоматического регулирования разомкнутого типа по возмущению, в качестве которого здесь фигурируют силц инерции и силы веса. Система не требует -непосредственного контроля величишл радиальных воздушных зазоров, а центрирувдиё ротор электромагнитные силы отталкивания дуйствуют и- в ТОМ случае, когда ось ротора занимает желаемое положение и совпадает с осью внешнего цилиндра корпуса 23. С другой стороны, в системе используется и принцип регулирования по отклонению, поскольку При всяком неравенстве величин зазоров между ротором и подвижными элементами 26, независимо от причины этого неравенства, также возникают центрирующие электромагнитные усилия. При достаточно большой сложности выполняемых ею функций, система регулирования работает без потребления энергии. Хотя теоретически такая система при правильной настройке способна обеспечить точную компенсацию радигшвных составляющих сил инерции и силы веса ротора, практически этого до-, Ситься трудно главным образом из-i за разброса и нестабильности параметров постоянных магнитов. Поэтому для остижения большей точности центрирования ротора она может быть дополнен вспомогательной системой регулирования замкнутого типа с непосредственным измерением величин радиальных зазоров с помощью датчиков, В качест ве исполнительных элементов использу ются электромагниты 12 и 13 с обмотками 14 и 15 на статоре и ферромагнитные кольцевые магнитопроводы 5 и на роторе. Система регулирования торцовых за зоров между статором и ротором включ ет в себя основную систему замкнуто,го типа, использукяцую в качестве исполнительных элементов кольцевые эле тромагниты 18 и 19 с обмотками 20 и 21 на статоре и ленточные кольцевые магнитопроводы 7 и 8 на роторе, Основуая система использует электромаг нитные силы притяжения между элементами ротора и статора Кроме того, имеется вспомогательная система с ис пользованием электромагнитных сил от талкивания тех же постоянных магни- ч трв ротора и статора, которые входят: в состав системы регулирбвгаиия радиальных зазоров, . Работа вспомогательной системы объясняется с помощью фиг. 5, где отмечены только определяющие ее работу элементы. Устройство изображено в положении когда ось вращения.ротора вертикальн .и сила веса ротора Р-, .направлена вдол этой оси. При этом основная система регулирования торцовых зазоров на электромагнитах должна Обеспечивать достаточно жесткий подвес ротора, та что его смещение под действием силы веса относительно статора незначительно. Но сила веса Pj действует и на узел устройства, включающий в себя аксиально подвижный цилиндр 24 и связанные с ним радиально подвижные элементы 26. . , Под действием силы Р подвижный цилиндр 24 проскальзывает по : внутренней цилиндрической поверхности корпуса 23, в связи с чем между магнитными осями постоянных магнитов 2 н 3 ротора и магнитов 27 и 28 статора появляется аксиальный.сдвиг, и они уже не расположены точно один против другого. При этом ПОЯВЛЯ10ТСЯ СИЛЫ;; ОСевого выталкивания ротора Р и Fj, рав нодействующая F которых направлена вдоль оси вращения ротора противоположно силе веса Р ротора и способна полностью или частично скомпенсировать силу веса ротора (или осевую составляющую силы веса) если его ось вращения занимает .промежуточное положение между вертикальным и горизонтальным, а также и осевые составляющие сил инерции. При наличии аксиального сдвига магнитов ротора и статора на узел цилицдра 24 и элементов 26 действует сила, равная f и противоположная ей по направлению осевая сила F-, стремящаяся. увеличить аксиальный сдвиг магнитов, а при увеличении этого сдвига одновременно растут силы выталкивания F и F-j. Таким образом, взаимное пространственное положение ротора 1 и подвижного цилиндра 24, при котором магнитные оси постоянных магнитов ротора и статора совпсщают, является положением неустойчивого равновесия, если не принять специальных мер. Раз начавшись под действием, например, силы веса ротора, аксиальное смещение магнитов продолжается до достижения мак симально возможного смещения (до упора) , причем в дальнейшем положение равновесия не восстанавливается, даже если осевая составляющая силы веса исчезает (например, ось вращения ротора принимает горизонтальное положение). . . .. . Поэтому рЦля нормальной раб.оты уст- ройства необходимо/ чтобы на узел .родвижного цилиндра 24 со стороны корпуса действовала бы осевая центрирую- щан сиЛа Fe/ превосходящая по вели- . чнне силу и противоположная: ей по направлению. С этой целью на торцовых поверхностях подвижного цилиндра 24 предусмотрены постоянные магниты 25, обращенные своими одноименными полюсами к постоянным магнитам 22, закрепленным на боковых фландах корпуса устройства. Сила Fg и является разностью сил отталкивания указанных постоянных магнитов. На фиг. 6 представлены графики сил, действующих на узел подвижного цилиндра 24, как функции величины одного из двух торцовых зазоров ((фиг. 5). Максимальная величина зазора равйс ... . . Электромагнитная сила Рд является разностью сил оттгшкйвания Fg в системе постоянных магнитов 22 и 25, действующей на узел цилиндра 24 со стороны корпуса устройства, и. силы F-,, действующей на него же со. стороны ротора. Кроме. Fg к узлу цилиндра 24 приложена сила его веса Р (или ее осевая составляющая, а при наличии ускорений - и силы инерции). Установившееся значение зазора о . соответствует равенству противо-, положно направленных сил РТ. и Fg {при пренебрежении силами трения), Это значение зазора меньше его среднего (Л + значения - -. ., , что и обеспечивает аксиальное смещение магнитов 27 и 28 подвижных элементов 26 по отношению , к магнитам 2 и 3 ротора и возникновению электромагнитной силы F,, направленной противоположно силе веса ротора Р;. При отсутствии осевых составляющих сил веса Р-, и PI узел цилиндра 24 возвращается в положение равновесие Р этом 0. В отличие от системы регулирования радиальных зазоров paccNtoTpeHHOa устройство регулирования торцовых за зоров с использованием постоянных магнитов следует считать вспомога|Тельньш, поскольку без системы регу лирования по отклонению на электромагнитах 18 и 19 оно неработоспособн , Таким образом предлагаемое устрой ство объединяет в себе собственно электродвигатель и систему подвеса ротора с использованием сил отталкивания постоянн14Х магнитов дополненную корректирУкяцими элементами на электромагнитах. В отличие от известных устройств такого типа система на постояи|адх магнитах включает в себя радйально и аксиально подвижные элементы статора и осуществляет регу лирОвание по возмущению, когшенсируя полностью или частично силы веса и силы инерции, действующие на ротор, в том числе, в принципе, и при отсутствии сдвига центра масс ротора относительно заданного положения. Предлагаемый принцип действия может быть реализован в ряде конструктивных вариантов. Например, злектродвигатель может быть исполнен с внешним или внутренним статором, различним может быть количество подвижных элементов 26, Для уменьшения трения при перемещении подвижного цилиндра 24 относительно корпуса 23 могут приМеняться опоры качения с ограниченным линейным перемещением. Следует отметить, что предлагаемое устройство компенсации радиальных и осевых составляющих сил веса и инерции на постоянных магнитах может быта с успехом применено и в сочетании с опорами ротора на подлипниках качения, поскольку заложенный в нем принцип регулирования по возмущению не требует отклонений оси вращения ротора от заданного его положения. Такая комбинированная onojpa на .подшипниках качения с электромагнитной разгрузкой от осевых и радиальных сил npocTa работает без потребления энергии и обеспечивает существенное увеличение срока :СЛУЖ6Ы ПОДШИПНИКОВ. Технико-экономическая целесообразность применения конструкции определя ется ее специфическими особенностями состоящими в отсутствии контактных опор ротора и малом моменте трения. Она может применяться в точных системах регулирования и для создания высокооборотных электромеханических устройств. Формула изобретения 1.Электродвигатель-маховик с электромагнитным подвесом ротора, содержащий электродвигатель со статором, связанным.с корпусом, ротором, и систему электромагнитного подвеса ротора с использованием постоянных маггнитов, расположенных на роторе и статоре и об1ращейвых друг к другу своими одноименными полюсами,а также TOjMto-s.. вых электромагнитов,состоящий из коль цевых магнитопроводов на роторе и |лагнитопроводов с обмотками управления на статоре, о т л и ч а и й- ся тем, что;, с целью улучшения энер гетических характеристик и качества системы электромагнитного подвеса ротора,, между наружной поверхностью ротора и внутренней цилиндрической поверхностью корпуса устройства помещены на цилиндре подвижные элементы с закрепленными на их вну-тренней tioверхностй постоянными магнит ш статора, представляющие собой размещенные с зазорами относительно друг друга отдельные цилиндрические сектора, выполненные с возможностью перемацения относительно корпуса, например, путем обкатки на подшипниках качения. 2.Электродвигатель-Маховик, по п. 1, о т л и ч а ю щ и и с я тем, что цилиндр, по внутренней поверхности которого обкатываются указанные сектора с постоянными магнитами, выролнен аксиально подвижным относительно внешнего цилиндрического корпуса устройства, причем на торцовых поверхностях подвижного цилиндра помещены постоянные магниты обращенные . своими одноименными полюсами к постоянным магнитам, закрепленным на боковых фланцах корпуса устройства. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 762100, кл. Н 02 К 29/00, 1978.. 2.Авторское свидетельство СССР 74870.2, кл. Н 02 К 29/02, 1978. -21 26 283 н Фиг.1 J(
| название | год | авторы | номер документа |
|---|---|---|---|
| Электродвигатель | 1988 |
|
SU1658284A1 |
| Электродвигатель | 1978 |
|
SU748702A1 |
| Вентильный электродвигатель-маховик с электромагнитным подвесом ротора | 1980 |
|
SU905950A1 |
| ВЫСОКОСКОРОСТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ВЕРТИКАЛЬНЫМ ВАЛОМ | 2013 |
|
RU2540696C1 |
| Электродвигатель с электромагнитным подвесом ротора | 1983 |
|
SU1163422A1 |
| ГРАВИРОВАЛЬНОЕ УСТРОЙСТВО (ВАРИАНТЫ) | 2010 |
|
RU2429139C1 |
| ГИБРИДНЫЙ МАГНИТНЫЙ ПОДШИПНИК С ОСЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2540215C1 |
| Беспазовый синхронный генератор с интегрированным магнитным подвесом | 2016 |
|
RU2647490C1 |
| Гидродинамический гироскоп | 2021 |
|
RU2769078C1 |
| Электромеханический исполнительный орган системы ориентации искусственного спутника Земли | 2016 |
|
RU2649560C2 |
it
ft
