А 37 за б зб гв г г ч zs п з зг
Фиг1
, 1} 33 2S 11 П
о ел
00
ho со
из подвижных элементов 35, несущих на себе постоянные магниты и свободно перемещающихся относительно цилиндра и корпуса путем обкатки. Указанные подвижные элементы выполнены в виде цилиндрических секторов со сквозными пазами, в которых помещены постоянные магниты 36 и 37. На роторе закреплены кольцевые радиаль- но намагниченные постоянные магниты 2 и 3, причем постоянные магниты цилиндрических секторов обращены к ним своими одноименными полюсами. Предусмотрены
дополнительные закрепленные на корпусе кольцевые магнитопроводы 23 и 24 с обмотками, токи в которых регулируются по сиг налам датчиков зазора между ротором и статором. Силовое взаимодействие этих токов с магнитными полями постоянных магнитов подвижных элементов позволяет устанавливать их в пространственном положении, при котором обеспечивается наибольшая точность компенсации радиальных и осевых составляющих действующих на ротор-сил веса и инерции. 10 ил.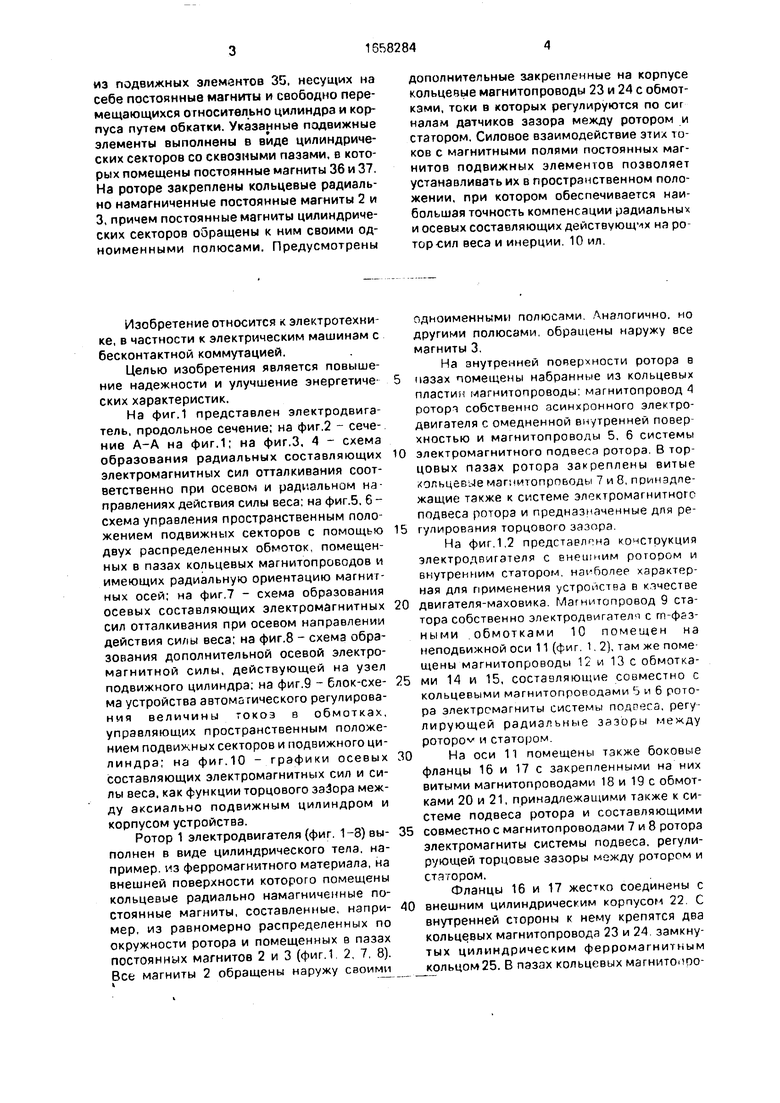
| название | год | авторы | номер документа |
|---|---|---|---|
| Электродвигатель-маховик с электромагнитным подвесом ротора | 1981 |
|
SU964883A1 |
| Электродвигатель | 1978 |
|
SU748702A1 |
| Беспазовый синхронный генератор с интегрированным магнитным подвесом | 2016 |
|
RU2647490C1 |
| Электродвигатель с электромагнитным подвесом ротора | 1983 |
|
SU1163422A1 |
| ВЫСОКОСКОРОСТНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ВЕРТИКАЛЬНЫМ ВАЛОМ | 2013 |
|
RU2540696C1 |
| Вентильный электродвигатель-маховик с электромагнитным подвесом ротора | 1980 |
|
SU905950A1 |
| Система магнитного подвеса ротора | 1979 |
|
SU920375A1 |
| Электромагнитный подвес двигателя-маховика | 1986 |
|
SU1394334A1 |
| РОТОРНАЯ СИСТЕМА МАГНИТОЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2011 |
|
RU2475926C1 |
| Бесконтактная торцовая синхронная машина | 1989 |
|
SU1720127A1 |
Изобретение относится к электромеханике, в частности к электрическим машинам с бесконтактной коммутацией Цель изобретения - повышение надежности и улучшение энергетических характеристик Устройство содержит собственно электро двигатель, систему электромагнитного под веса ротора на электромагнитах и систему силовой разгрузки ротора с использованием высококоэрцитивных постоянных магнитов Система силовой разгрузки позволяет компенсировать действующие на ротор силы веся и инерции при любом пространственном положении оси вращения ротора Она состоит из аксиально подвижного относительно корпуса устройства цилиндра 30 и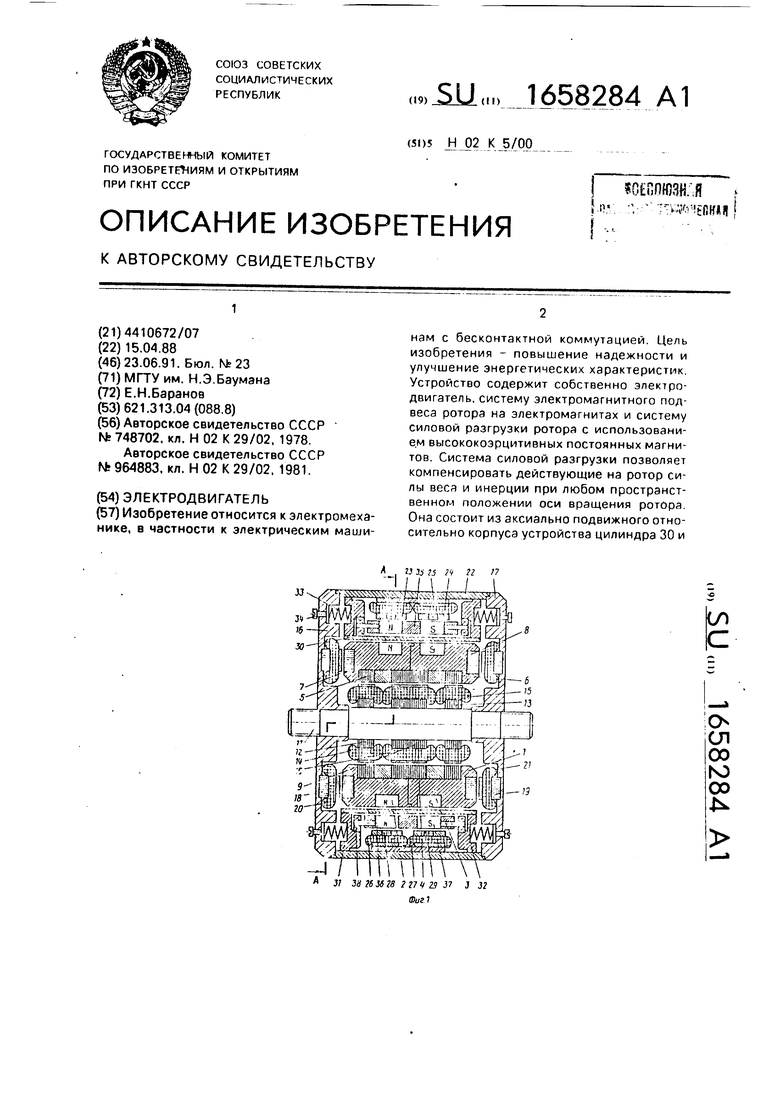
Изобретение относится к электротехнике, в частности к электрическим машинам с бесконтактной коммутацией.
Целью изобретения является повышение надежности и улучшение энергетиче- ских характеристик.
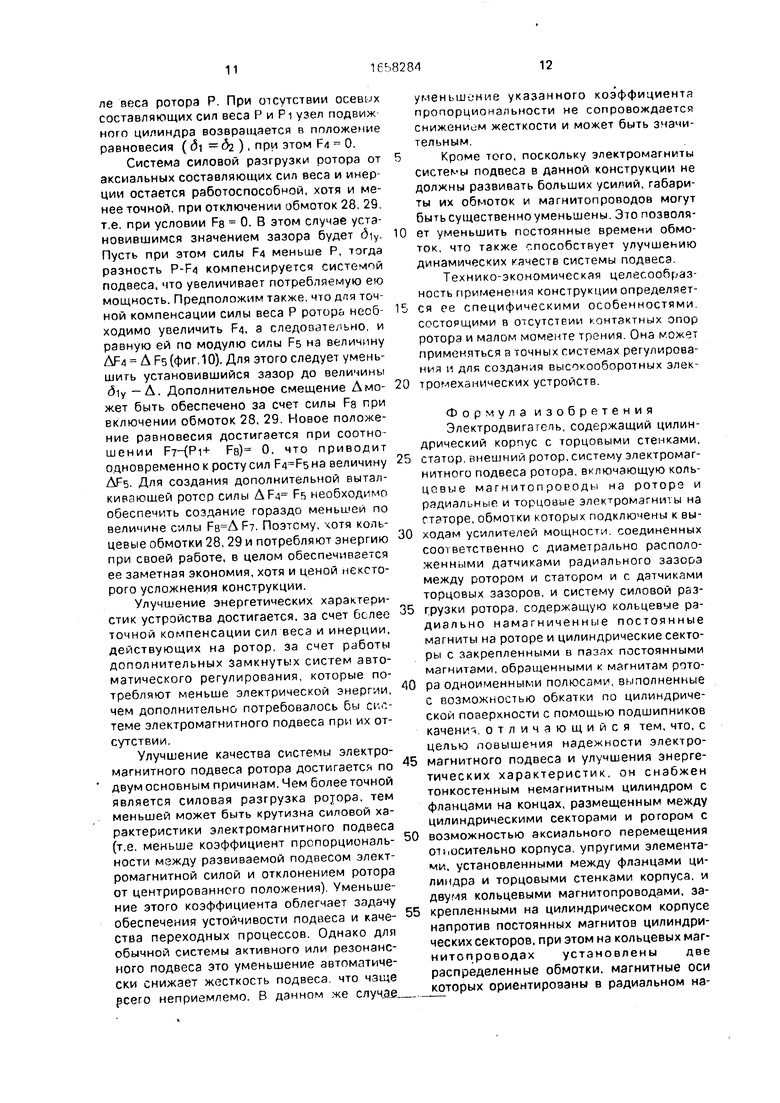
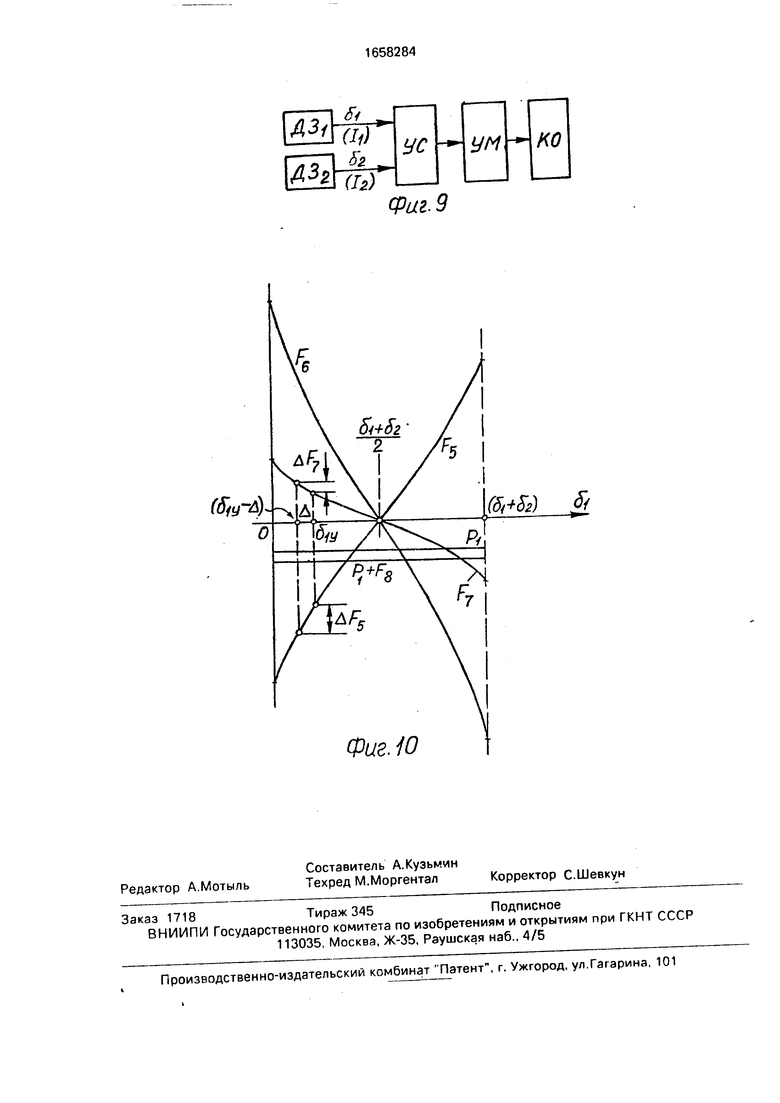
На фиг.1 представлен электродвигатель, продольное сечение; на фиг.2 - сечение А-А на фиг,1; на фиг.З, 4 - схема образования радиальных составляющих электромагнитных сил отталкивания соответственно при осевом и радиальном направлениях действия силы веса; на фиг.5. 6 - схема управления пространственным положением подвижных секторов с помощью двух распределенных обмоток, помещенных в пазах кольцевых магнитопроводов и имеющих радиальную ориентацию магнитных осей; на фиг.7 - схема образования осевых составляющих электромагнитных сил отталкивания при осевом направлении действия силы веса; на фиг.8 - схема образования дополнительной осевой электромагнитной силы, действующей на узел подвижного цилиндра; на фиг.9 - Блок-схе- ма устройства автомагического регулирования величины токоэ в обмотках, управляющих пространственным положением подвижных секторов и подвижного цилиндра; на фиг.10 - графики осевых составляющих электромагнитных сил и силы веса, как функции торцового заЗора между аксиально подвижным цилиндром и корпусом устройства.
Ротор 1 электродвигателя {фиг. 1-8) вы- полней в виде цилиндрического тела, например, из ферромагнитного материала, на внешней поверхности которого помещены кольцевые радиально намагниченные постоянные магниты, составленные, напри- мер, из равномерно распределенных по окружности ротора и помещенных в пазах постоянных магнитов 2 и 3 (фиг.1. 2, 7, 8). Все магниты 2 обращены наружу своими
одноименными полюсами. Аналогично, но другими полюсами, обращены наружу все магниты 3,
На внутренней поверхности ротора в пазах помещены набранные из кольцевых пластин магнитопроводы: магнитопровод 4 роторч собственно асинхронного электродвигателя с омедненной внутренней поверхностью и магнитопроводы 5, 6 системы электромагнитного подвеса ротора. В торцовых пазах ротора закреплены витые хольцеЕЫе мап итопроводы 7 и 8, принадлежащие также к системе электромагнитного подвеса ротора и предназначенные для регулирования торцового зазора.
На фиг.1,2 представлена кочстоукция электродвигателя с внешним ротором и внутренним статором, наиболее характерная для применения устройства в качестве двигателя-маховика. Магнитопровод 9 статора собственно электродвигателя с гп-фез- ными обмотками 10 помещен на неподвижной оси 11 (фиг. 1, 2), там же помещены магнитопроводы 12 и 13с обмотками 14 и 15, составляющие совместно с кольцевыми магнитопроводами 5 и 6 ротора электромагниты системы подпесэ, регулирующей радиальные зазоры между pOTOpov и статором.
На оси 11 помещены также боковые фланцы 16 и 17 с закрепленными на них витыми магнитопроводами 18 и 19с обмотками 20 и 21, принадлежащими также к системе подвеса ротора и составляющими совместно с магнитопроводами 7 и 8 ротора электромагниты системы подвеса, регулирующей торцовые зазоры между ротором и статором.
Фланцы 16 и 17 жестко соединены с внешним цилиндрическим корпусом 22. С внутренней стороны к нему крепятся два кольцевых магнитопровода 23 и 24 замкнутых цилиндрическим ферромагнитным кольцом25. В пазах кольцевых магнитопооводов помещены две распределенные ofi мотки 26 и 27, магнитные оси которых ори ентированы в радиальном направлении и сдвинуты в пространстве на 90°, а также в специальных кольцевых пазах две кольцевые обмотки 28 и 29. Последние соединены последовательно, а взаимные направления токов в них показаны на фиг.8.
Между магнитопроводами 23. 24 и ротором 1 расположен узел аксиально подвижного цилиндра, состоящего из тонкостенного немагнитного цилиндра 30, скрепленного с двумя боковыми фланцами 31, 32, способными скользить по внутренней поверхности корпуса 22, Осевым смещением узла подвижного цилиндра относительно корпуса устройства противодействуют упругие элементы, например пружины сжатия 33. равномерно расположенные по окружности фланцев 16, 17. Их индивидуальная регулировка осуществляется в простейшем случар нажимными винтами 34.
По внутренней цилиндрической поверхности фланцев 31, 32 свободно обкатываются подвижные элементы 35, представляющие собой размещенные с зазорами относительно друг друга отдельные цилиндрические секторы со сквозными пазами, в которых размещены два ряда постоянных магнитов 36, 37. составляющие в целом два радиально намагниченных постоянных магнита, обращенные к постоянным магнитам 2 и 3 ротора одноименными полюсами. Обкатка осуществляется, например, с помощью подшипников 38 качения малого диаметра. Подшипники размещены в специальных углублениях фланцев 31, 32. что исключает осевые перемещения подвижных элементов 35 относительно цилиндра 30. Осевые перемещения одновременно всех секторов относительно корпуса 22 возможны только вместе с узлом подвижного цилиндра.
Электродвигатель работает спедующим образом.
В данном случае применен асинхронный электродвигатель с внутренним статором 9 и определенным внешним магнитопроводом 4 ротора, обеспечивающий крутящий момент ротора. Он отвечает требованиям к электродвигателю, как составной части рассматриваемой системы. которые сводятся к тому, что он должен быть бесконтактным, по возможности не иметь обмоток на роторе и не создавать значительных сил одностороннего притяжения между ротором и статором, мешающих работе системы подвеса ротора. С этой целью используется известное техническое решение, предусматривающее, включение конденсаторов в цепь фазных обмоток статора, что позволяет совместить собственно электродвигатель с системой резонансного подвеса. Такая система не в состоянии самостоятельно справиться с задачей подвеса и точного центрирования массивного ротора, но, во всяком случае, сила одностороннего притяжения при этом не возникает.
Если есть необходимость в регулировании скорости в широких пределах, в качестве варианта можно применить вентильный электродвигатель с бесконтактной коммутацией, причем наиболее приемлемой является конструкция двигателя с увеличенным немагнитным зазором между ротором и ста- гором и с возбуждением от достаточно высококоэрцитивных постоянных магнитов, помещенных на роторе. Благодаря этому
удается существенно снизить силу одностороннего притяжения,поскольку максимально возможные в конструкции радиальные отклонения ротора от центрированного положения оказываются много меньше величины указанного зазора.
Система электромагнитного подвеса ротора функционально разделяется на систему регулирования радиальных зазоров и систему регулирования торцовых зазоров
между ротором и статором. Первая включает в себя электромагниты с обмотками 14,15 на статоре, вторая - торцовые электромагниты с обмотками 20, 21. Обе системы используют в работе силы электромагнитного
притяжения. Они могут быть выполнены как системы резонансного или активного подвеса. Во втором случае необходимо предусмотреть датчики зазора
Система силовой разгрузки ротора функционально также разделяется на систему компенсации радиальных составляющих силы веса и сил инерции, действующих на ротор, и систему компенсации осевых составляющих этих сил. Система компенсации радиальных составляющих сил веса и инерции включает в себя ротор 1, подвижные элементы 35, кольцевые магнитопрово- ды 23, 24 с обмотками 26, 27.
Если сила веса ротора направлена по
оси вращения (вертикальное положение оси), то и силы веса, действующие на подвижные элементы - секторы 35. имеют то же направление и уравновешиваются реакцией опоры. Поскольку между элементами
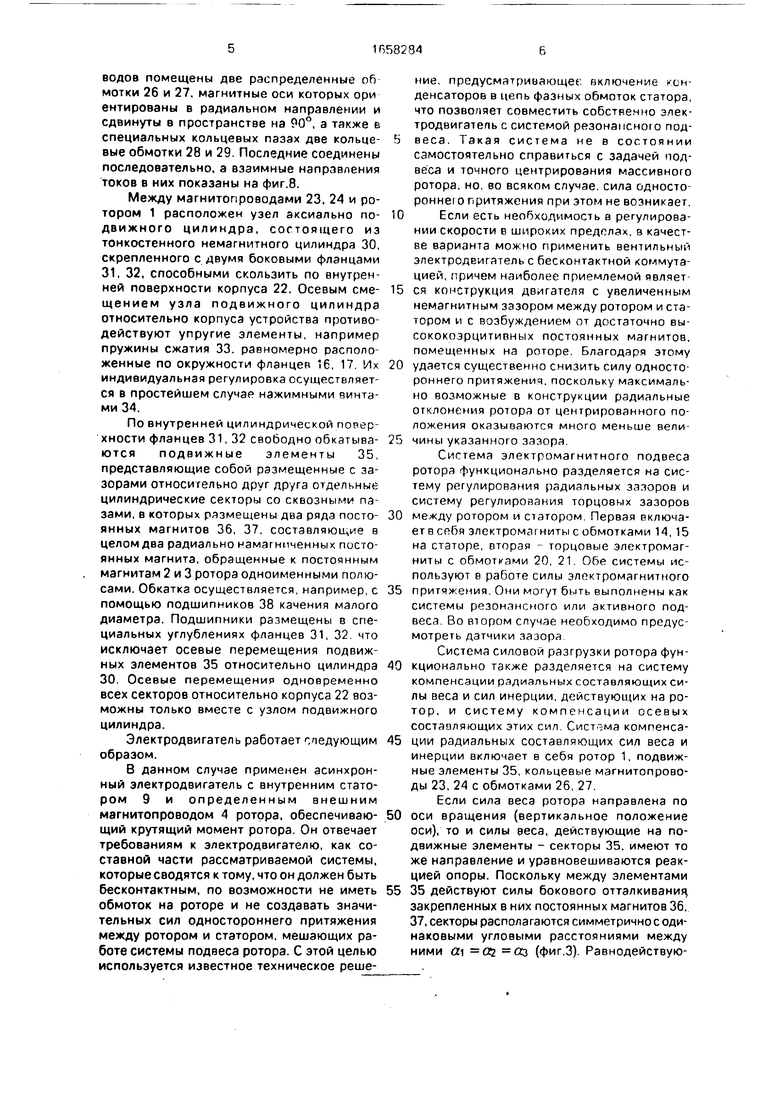
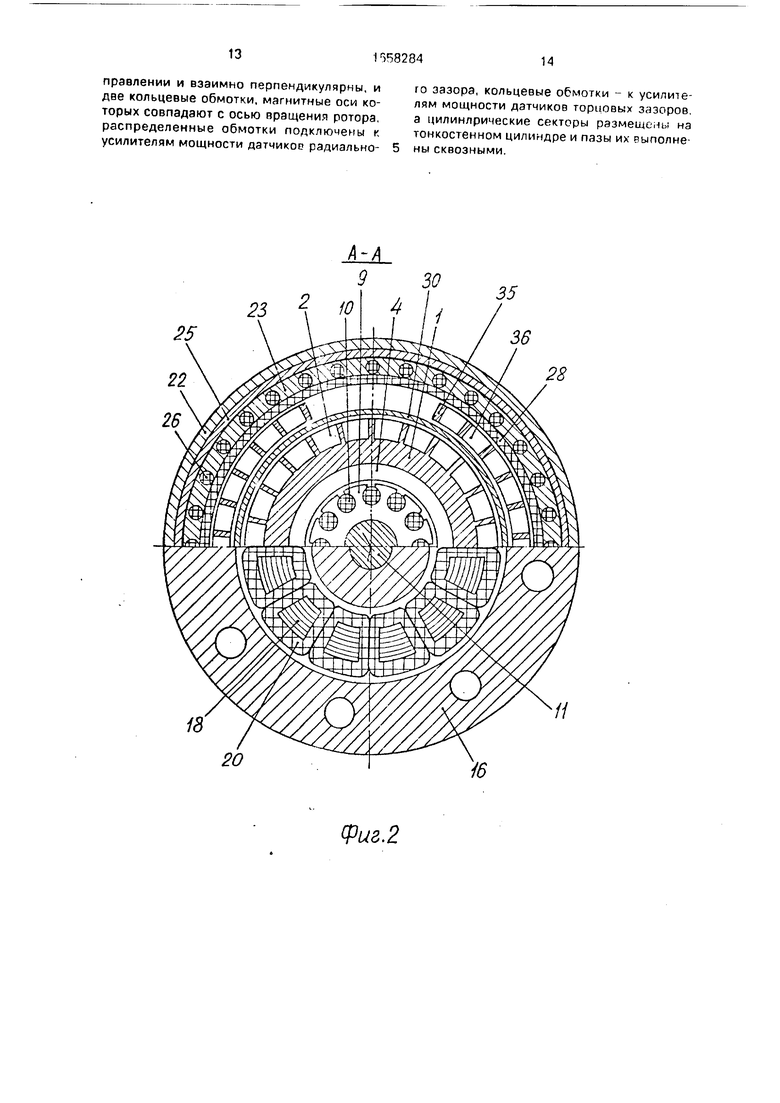
35 действуют силы бокового отталкивания, закрепленных в них постоянных магнитов 36, 37, секторы располагаются симметрично с одинаковыми угловыми расстояниями между ними ai О2 «з (фиг.З). Равнодействующая радиальных электромагнитных сил FI, FZ, Рз отталкивания ротора 1 от подвижных элементов 35, приведенная к центру масс ротора, при равномерном зазоре мех-.ду ротором и элементами 35 равна нулю.
Если происходит отклонение оси вращения ротора от вертикали (вплоть до горизонтального ее положения), возникает радиальная составляющая Р силы веса ротора и одновременно составляющие сил веса подвижных элементов 35, действующие в плоскости, перпендикулярной оси вращения, которые заставляют их а резулотате обкатки по поверхности фланцев 31,32 принять асимметричное положение, при котором, например щ О2 «з (фиг.4). Кроме этих составляющих, на подвижные элементы действуют также электромагнитные силы взаимодействия закрепленных в них постоянных магнитов с токами в обмотках 26, 27. Такое взаимодействие с одной из двух распределенных обмоток (с обмоткой 27) иллюстрируется на фиг.5, 6.
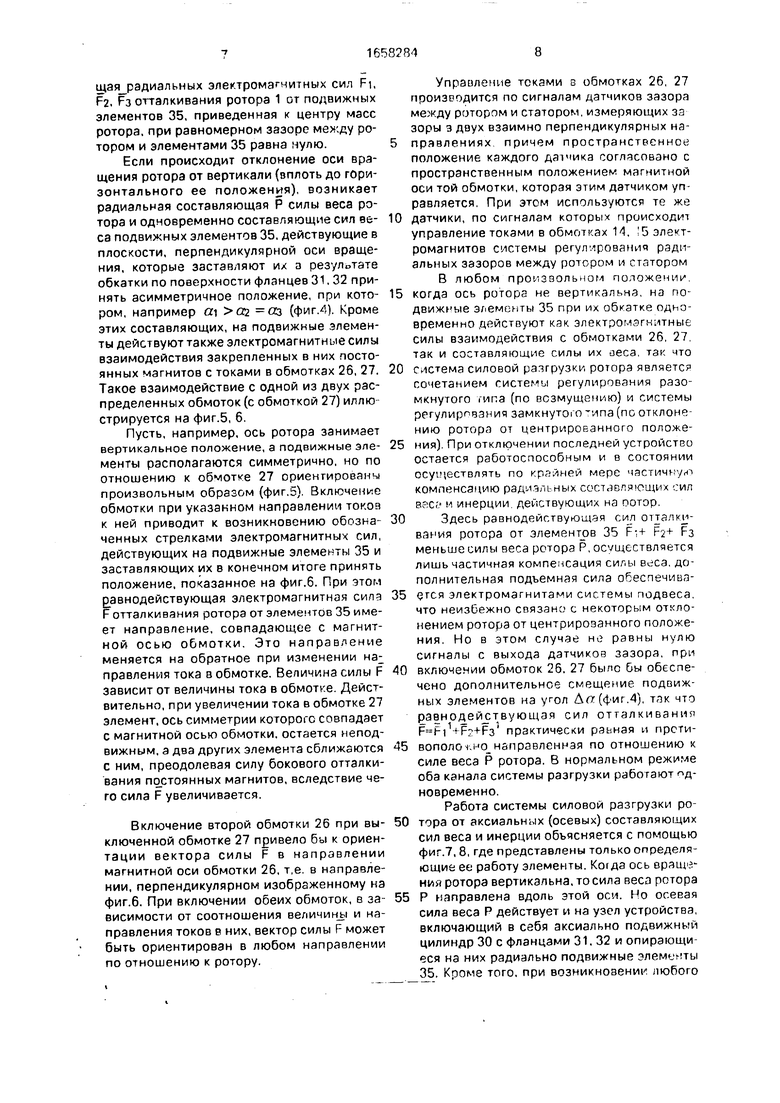
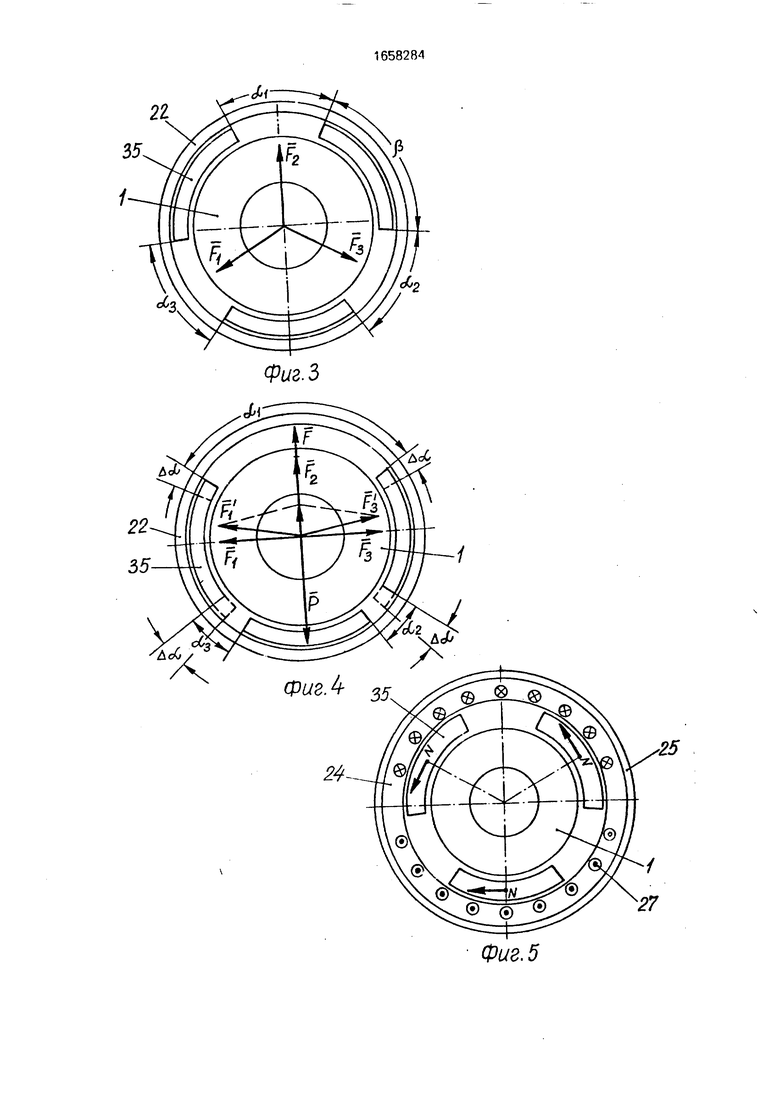
Пусть, например, ось ротора занимает вертикальное положение, а подвижные элементы располагаются симметрично, но по отношению к обмотке 27 ориентированы произвольным образом (фиг.5). Включение обмотки при указанном направлении токоа к ней приводит к возникновению обозначенных стрелками электромагнитных сил, действующих на подвижные элементы 35 и заставляющих их в конечном итоге принять положение, показанное на фиг.6. При этом равнодействующая электромагнитная сила F отталкивания ротора от элементов 35 имеет направление, совпадающее с магнитной осью обмотки. Это направление меняется на обратное при изменении на правления тока в обмотке. Величина силы F зависит от величины тока в обмотке. Действительно, при увеличении тока в обмотке 27 элемент, ось симметрии которого совпадает с магнитной осью обмотки, остается неподвижным, а два других элемента сближаются с ним, преодолевая силу бокового отталкивания постоянных магнитов, вследствие чего сила F увеличивается.
Включение второй обмотки 26 при выключенной обмотке 27 привело бы к ориентации вектора силы F в направлении магнитной оси обмотки 26, т,е. в направлении, перпендикулярном изображенному на фиг.6. При включении обеих обмоток, в зависимости от соотношения величины и направления токов в них, вектор силы F может быть ориентирован в любом направлении по отношению к ротору.
Управление токами в обмотках 26, 27 производится по сигналам датчиков зазора между ротором и статором, измеряющих зз зоры з двух взаимно перпендикулярных направлениях причем пространственное положение каждого датчика согласовано с пространственным положением магнитной оси той обмотки, которая этим датчиком управляется. При этом используются те же
0 датчики, по сигналам которых происходит управление токами в обмотках 14, 5 электромагнитов системы регулирования радиальных зазоров между ротором и статором В любом произвольном положении
5 когда ось ротора не вертикальна, на подвижные элементы 35 при их обкатке одновременно действуют как электромагнитные силы взаимодействия с обмотками 26, 27, так и составляющие силы их веса, так что
0 система силовой разгрузки ротора является сочетанием системы регулирования разомкнутого типа (по возмущению) и системы регулирования замкнуто: о ипа (по отклонению ротора от центрированного положе5 ния). При отключении последней устройство остается работоспособным и в состоянии осуществлять по крайней мере частичную компенсацию радиэльных составляющих сил м инерции действующих на оотор.
0Здесь равнодействующая сил отталкивания ротора от элементов 35 Fi+ F2+ Рз меньше силы веса ротора Р, осуществляется лишь частичная компенсация силы веса, дополнительная подъемная сила обеспечива5 егся электромагнитами системы подвеса, что неизбежно связано с некоторым отклонением ротора от центрирозанного положения, Но в этом случае не равны нулю сигналы с выхода датчиков зазора, при
0 включении обмоток 26. 27 было бы обеспечено дополнительное смещение подвижных элементов на уол Да (фиг.4), так что р эвнодей ствующэя сил отталкивания F Fi1 F2+F3( практически равная и прсти5 вополокио направленная по отношению к силе веса Р ротора. В нормальном режиме оба канала системы разгрузки работают одновременно.
Работа системы силовой разгрузки ро0 тора от аксиальных (осевых) составляющих сил веса и инерции объясняется с помощью фиг.7,8, где представлены только определяющие ее работу элементы. Когда ось вращения ротора вертикальна, то сила веса ротора
5 Р направлена вдоль этой оси. Но осевая сила веса Р действует и на узел устройства, включающий в себя аксиально подвижный цилиндр 30 с фланцами 31, 32 и опирающиеся на них радиально подвижные элемумты 35. Кроме того, при возникновение любого
аксиального смещения ротора относительно его центрированного положения на подвижные элементы 35, а следовательно, и на весь указанный узел, действуют осевые электромагнитные силы взаимодействия закрепленных в элементах 35 постоянных магнитов с кольцевыми обмотками 28, 29, расположенными в кольцевых пазах магни- топроводов 23, 24 и включенными последовательно таким образом, что направление токов в них противоположно (фиг.8). Пути замыкания силовых линий магнитных полей постоянных магнитов ротора и радиально подвижных элементов показаны пунктиром. При наличии тока в кольцевых обмотках между ними и магнитами 36, 37 возникает силовое взаимодействие, приводящее к возникновению осевой электромагнитной силы FS, действующей на радиально подвижные элементы 35 и через них на узел подвижного цилиндра, Величина и направление силы Fe определяется величиной и направлением токов в обмотках 28, 29.
На фиг.9 приведена структурная, схема системы регулирования тока в обмотках 28,
При любом отклонечии оси вращения ротора от горизонтального положения, т.е. при возникновении осевой составляющей силы веса ротора происходит некоторое осевое смещение ротора относительно центрированного положения, т.е. возникает некоторая разность торцовых зазоров между ротором и статором. Аксиальный канал системы электромагнитного подвеса, включающий в себя кольцевые магнитопроводы 7. 8 на роторе и 18, 19 на статоре с обмотками 20, 21 противодействуют этому смещению,
так что оно относительно с гэтора невелико Одновременно под действием осезой сс- ставляющей силы веса Pi и электромагнитной силы FB узел подвижного цилиндра
проскальзывает по внутренней поверхности корпуса 22, в связи с чем между магнитными осями постоянных магнитов 2 и 3 ротора и магнитов 36, 37на подвижных элементах появляется аксиальный сдвиг, они
не расположены точно один против другого. При этом появляются силы бокового выталкивания, равнодействующая F/i которых направлена вдоль оси вращения ротора и способна полностью или частично скомпенсировать силу веса ротора (или осевую составляющую силы веса, а также осевые составляющие сил инерции). Но в этом случае со стороны ротора на узел цилиндра действует равная по величине F4 противоположная по направлению осевая сила FS, стремящаяся увеличить аксиальный сдвиг магнитов, а при увеличении этрго сдвига одновременно растут и силы F, FS. Поэтому для нормальной работы устройства необходимо, чтобы на узеп подвижного цилиндра со стороны корпуса действовала бы осевая центрирующая сила Fe, превосходящая по величине силу FS и противоположная ей по направлению, которую и создают упругие
элементы - пружины 33 сжатия. Сила Fe является разностью сил отталкивания узла подвижного цилиндра от корпуса верхними и нижними пружинами при неравенстве торцовых зазоров 5i и д между фланцами
подвижного цилиндра и корпусом.
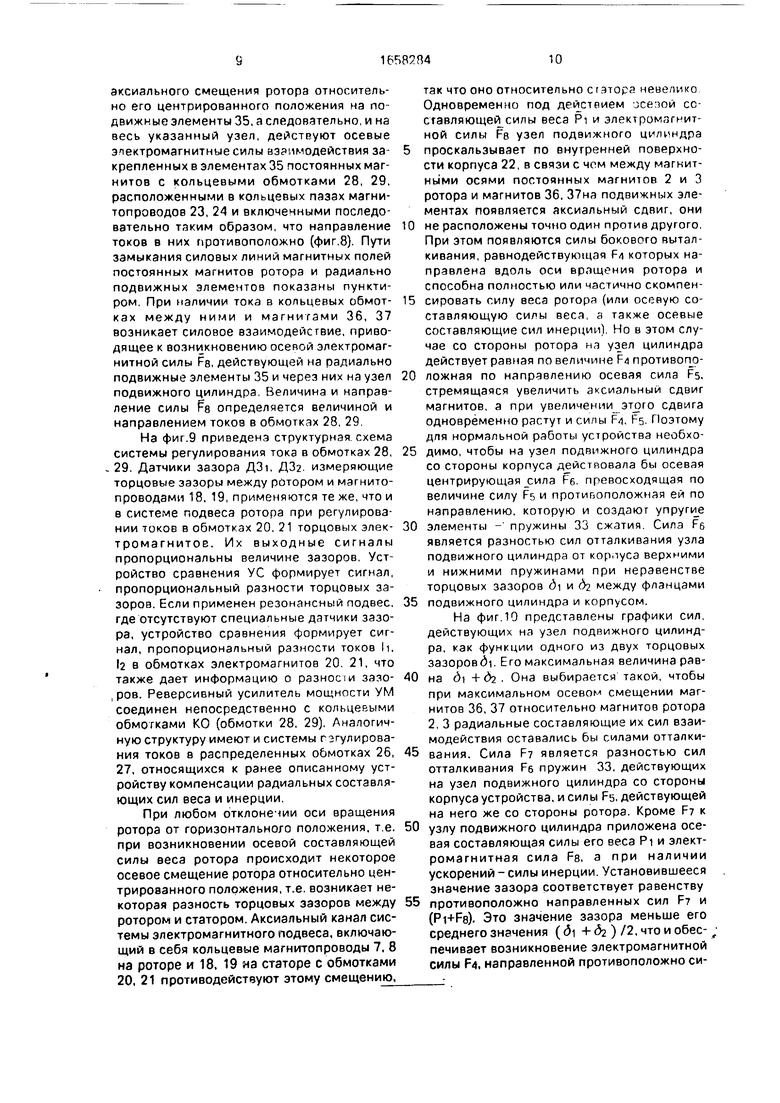
На фиг.10 представлены графики сил, действующих на узел подвижного цилиндра, как функции одного из двух торцовых зазоровд. Его максимальная величина равна д + д2 . Она выбирается такой, чтобы при максимальном осевом смещении магнитов 36, 37 относительно магнитов ротора 2, 3 радиальные составляющие их сил взаимодействия оставались бы силами отталкивания. Сила Fy является разностью сил отталкивания Рб пружин 33, действующих на узел подвижного цилиндра со стороны корпуса устройства, и силы Fg, действующей на него же со стороны ротора. Кроме F к
узлу подвижного цилиндра приложена осевая составляющая силы его веса Pi и электромагнитная сила FS, а при наличии ускорений - силы инерции. Установившееся значение зазора соответствует равенству
противоположно направленных сил F и (Pi+Fe). Это значение зазора меньше его среднего значения (3i +62 ) /2,чтоиобес- печивает возникновение электромагнитной силы F4. направленной противоположно силе веса ротора Р. При отсутствии осевых составляющих сил веса Р и Pi узел подвиж ного цилиндра возвращается в положение равновесия ((5i 62 ) при этом ft О,
Система силовой разгрузки ротора от аксиальных составляющих сил веса и инерции остается работоспособной, хотя и менее точной, при отключении обмоток 28, 29, т.е. при условии FS 0. В этом случае установившимся значением зазора будет (5iy. Пусть при этом силы F4 меньше Р, тогда разность P-F4 компенсируется системой подвеса, что увеличивает потребляемую ею мощность. Предположим также, что дпя точной компенсации силы веса Р ротора необходимо увеличить F4, а следовательно, и равную ей по модулю силы FS на величину Др4 A Fs (фиг, 10). Для этого следует уменьшить установившийся зазор до величины 5iy -Д. Дополнительное смещение А может быть обеспечено за счет силы Fa при включении обмоток 28, 29. Новое положение равновесия достигается при соотношении FB) 0, что приводит одновременно к росту сил F4-FsHa величину AFg. Для создания дополнительной выталкивающей ротор силы АРд Fs необходимо обеспечить создание гораздо меньшей по величине силы F. Поэтому, хотя кольцевые обмотки 28, 29 и потребляют энергию при своей работе, в целом обеспечивается ее заметная экономия, хотя и ценой некоторого усложнения конструкции.
Улучшение энергетических характеристик устройства достигается, за счет белее точной компенсации сил веса и инерции, действующих на ротор, за счет работы дополнительных замкнутых систем автоматического регулирования, которые потребляют меньше электрической энергии, чем дополнительно потребовалось бы системе электромагнитного подвеса при их отсутствии.
Улучшение качества системы электромагнитного подвеса ротора достигается по двум основным причинам. Чем более точной является силовая разгрузка ротора, тем меньшей может быть крутизна силовой характеристики электромагнитного подвеса (т.е. меньше коэффициент пропорциональности между развиваемой подвесом электромагнитной силой и отклонением ротора от центрированного положения). Уменьшение этого коэффициента облегчает задачу обеспечения устойчивости подвеса и качества переходных процессов. Однако для обычной системы активного или резонансного подвеса это уменьшение автоматически снижает жесткость подвеса, что чаще всего неприемлемо. В данном же случа е
уменьшение указанного коэффициента пропорциональности не сопровождается снижением жесткости и может быть значительным.
Кроме того, поскольку электромагниты
системы подвеса в данной конструкции не должны развивать больших усилий, габариты их обмоток и магнитопроводов могут бытьсущественноуменьшены. Это позволяет уменьшить постоянные времени обмоток, что также способствует улучшению динамических качеств системы подвеса.
Технико-экономическая целесообразность применения конструкции определяется ее специфическими особенностями. состоящими в отсутствии контактных опор ротора и малом моменте трения. Она ожет применяться в точных системах регулирования и для создания высокооборотных электромеханических устройств.
Формула изобретения Электродвигатель, содержащий цилиндрический корпус с торцовыми стенками,
статор, внешний ротор, систему электромагнитного подвеса ротора, включающую коль- цсвые магнитолроеоды на роторе и радиальные и торцовые электромагниты на статоре, обмотки которых подключены к выходам усилителей мощности, соединенных соответственно с диаметрально расположенными датчиками радиального зазора между ротором и статором и с датчиками торцовых зазоров, и систему силовой разгрузки ротора, содержащую кольцевые ра- диально намагниченные постоянные магниты на роторе и цилиндрические секторы с закрепленными в пазах постоянными магнитами, обращенными к магнитам ротора одноименными полюсами, выполненные с возможностью обкатки по цилиндрической поверхности с помощью подшипников качение, отличающийся тем, что, с целью повышения надежности электромагнитного подвеса и улучшения энергетических характеристик, он снабжен тонкостенным немагнитным цилиндром с фланцами на концах, размещенным между цилиндрическими секторами и ротором с
возможностью аксиального перемещения относительно корпуса, упругими элементами, установленными между фланцами цилиндра и торцовыми стенками корпуса, и двумя кольцевыми магнитопроводами, закрепленными на цилиндрическом корпусе напротив постоянных магнитов цилиндрических секторов, при этом на кольцевых маг- нитопроводах установлены две распределенные обмотки, магнитные оси которых ориентирозаны в радиальном направлении и взаимно перпендикулярны, и две кольцевые обмотки, магнитные оси которых совпадают с осью вращения ротора, распределенные обмотки подключены к усилителям мощности датчиков радиально18
го зазора, кольцевые обмотки - к усилителям мощности датчиков торцовых зазоров, а цилинлрические секторы размещены на тонкостенном цилиндре и пазы их выполнены сквозными.
28
//
Фиг.2
21
Фиг.З
Фиг. 5
ИГ
OS
At tt 6
Л -гясЬ
9 гпф
vjtv
) HI
ss
t Ssessi
Фиг. 9
Фиг. 10
| Электродвигатель | 1978 |
|
SU748702A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
