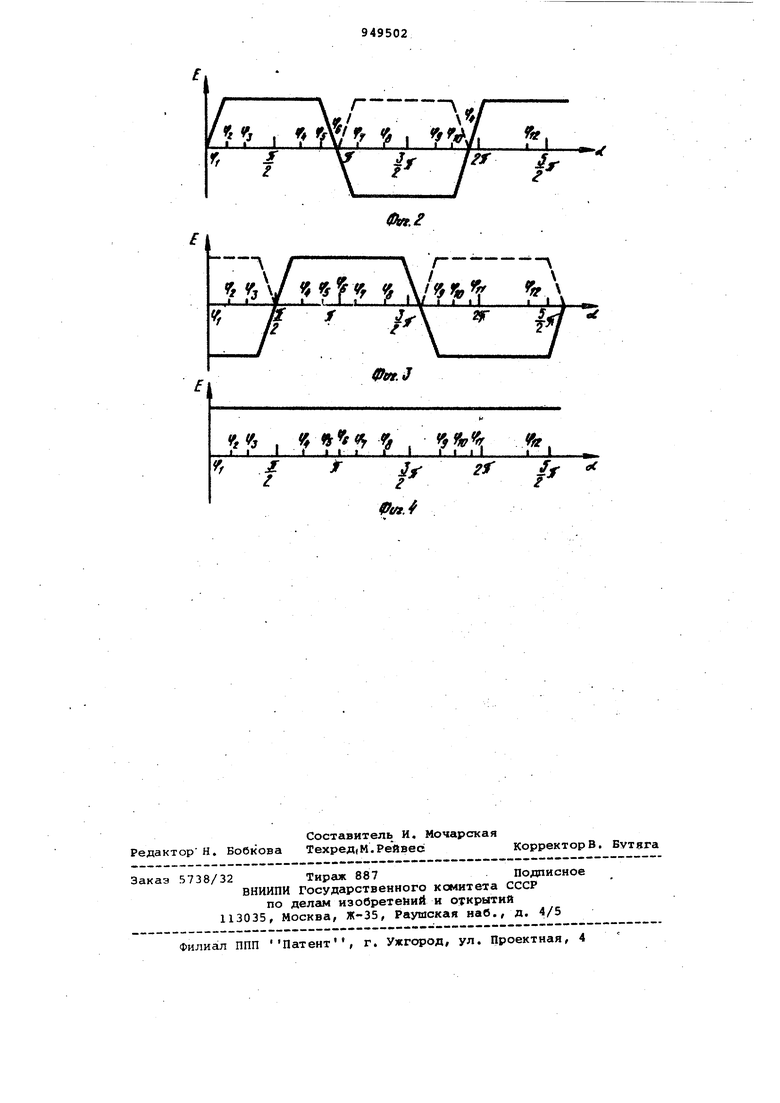
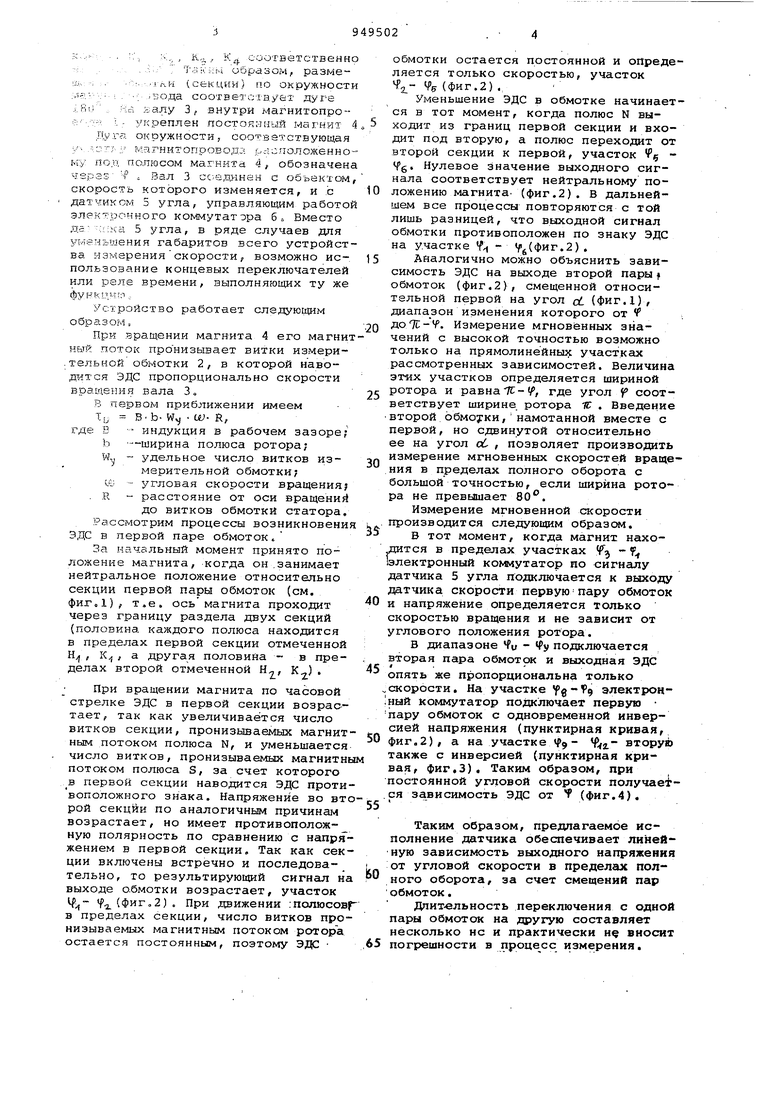
:;..- . ;, :.;.,, К.„ , У. соответственно -: . . образом, разме.и . . S vin.n (секции) по окружности ;,1л--.- i . ; .вода соответстнует дуге j.Ki; :-;d иалу 3,, внутри магнитопро -;-,7 г укреплен постоянный 4 .HyrJi окружности, соответствующая у -:::: j- гчзгнитопровод;- расположенноку ло.ц полюсом магнита 4, обозначена черзз о Вал 3 сс;е,п.инен с объектом скорость которого изменяется, и .с датчиком 5 угла, управляюиссим работой электронного коммутатора 6 Вместо да 5 угла, в ряде случаев для уменьщения габаритов всего устройства измеренияскорости, возможно использование концевых переключателей или реле времени, выполняющих ту же ФУВКЦЧ Р , Устройство работает следующим o6pa3orvi, При вращении магнита 4 его магнит ный поток пронизывает витки измери. тельной обмотки 2, в которой навод1Атся ЭДС пропорционально скорости вращения вала В первом приближении имеем Tiy В b- W, Ш- R, где В - индукция в рабочем зазоре; b --ширина полюса ротора; удельное число витков измерительной обмотки oil - угловая скорости вращенияj . R - расстояние от оси вращений до витков обмотки статора. Рассмотрим процессы возникновени ЭДС в первой паре обмоток. За начальный момент принято положение магнита, когда он .занимает нейтральное положение относительно секции первой пары обмоток (см, фиГо1), т.е. осьмагнита проходит через границу раздела двух секций (половина, каждого полюса находится в пределах первой секции отмеченной Н, К, а другая половийа - в пределах второй отмеченной Н, К,,) . При вращении магнита по часовой стрелке ЭДС в первой секции возрас-тает, так как увеличивается число витков секции, пронизываемых магнит ным потоком полюса N, и уменьшается число витков, пронизываемых магнитн потоком полюса S, за счет которого в первой секции наводится ЭДС проти воположного знака. Напряжение во вт рой секции по аналогичным причинам возрастает, но имеет противополож- ную полярность по сравнению с напря жением в первой секции. Так как сек ции включены встречно и последовательно, то результируюйшй сигнал н выходе о.бмотки возрастает, участок (фига2) . При движении :naraocoB в пределах секции, число витков про низываемых магнитным потоком ротора остается постоянным, поэтому ЭДС обмотки остается постоянной и определяется только скоростью, участок Ч (фиг,2)., Уменьшение ЭДС в обмотке начинается в тот момент, когда полюс N выходит из границ первой секции и входит под вторую, а полюс переходит от второй секции к первой, участок Ф fg, Нулевое значение выходного сигнала соответствует нейтральному положению магнита (фиг,2), В дальнейшем все процессы повторяются с той лишь разницей, что выходной сигнал обмотки противоположен по знаку ЭДС на участке f - «/(фиг,2) , Диалогично можно объяснить зависимость ЭДС на выходе второй пары f обмоток (фиг,2)/ смещенной относительной первой на угол cf. (Фиг,1), диапа зон изменения которого от V доТС-Ч. Измерение мгновенных значений с высокой точностью возможно только на прямолинейных участках рассмотренных зависимостей. Величина эт«х участков определяется шириной ротора и равна те-V, где угол Р соответствует ширине, ротора IE , Введение второй обмоуки, намота нной вместе с первой, но сдвинутой относительно ее на угол о , позволяет производить измерение мгновенных скоростей вращения в пределах полного оборота с большой точностью, если ширина ротора не превышает 80, Измерение мгновенной скорости производится следующим образом. В тот момент, когда магнит нахо цится в пределах участках f электронный KONwyTaTOp по сигналу датчика 5 угла подключается к выходу да.тчика скорости первуюпару обмоток и напряжение определяется только скоростью вращения и не зависит от углового положения ротора, В диапазоне fy - Vy подключается вторая пара обмотсж и выходная ЭДС опять же Пропорциональна только скорости. На участке электрон ный коммутатор подключает первую пару обмоток с одновременной инверсией напряжения (пунктирная кривая, фиг,2), а на участке 43. втору также с инверсией (пунктирная кривая, фиг.З), Таким образом, при постоянной угловой скорости получае .ся зависимость ЭДС от Н (фиг.4). Таким образом, предлагаемое исполнение датчика обеспечивает линейную зависимость выходного напряжения от угловой скорости в пределах полного оборота, за счет смещений пар обмоток. Длительность переключения с одной пары обмоток на другую составляет несколько НС и практически н вносит погрешности в процесс измерения.
Последовательное и встречное включение обмоток с одной стороны увеличивает чувствительность, а с другой обуславливает малую постоянную времени, так как суммарная индуктивность пар обмоток стремится к нулю.
А бифилярное исполнение обмоток обеспечивает их полную эквивалентность, что исключает колебание выходного напряжения в момент переключения.
Применение датчика частоты в системах регулирования частоты вращения электропривода йозволит повысить точность поддержания и улучшить тем ccuejM качество процесса регулирования Годовой эконсмический эффект достигаемый за счет этого, составляет 1,6 - 2,4 тыс.руб. на одну систему регулирования.
Формула изобретения
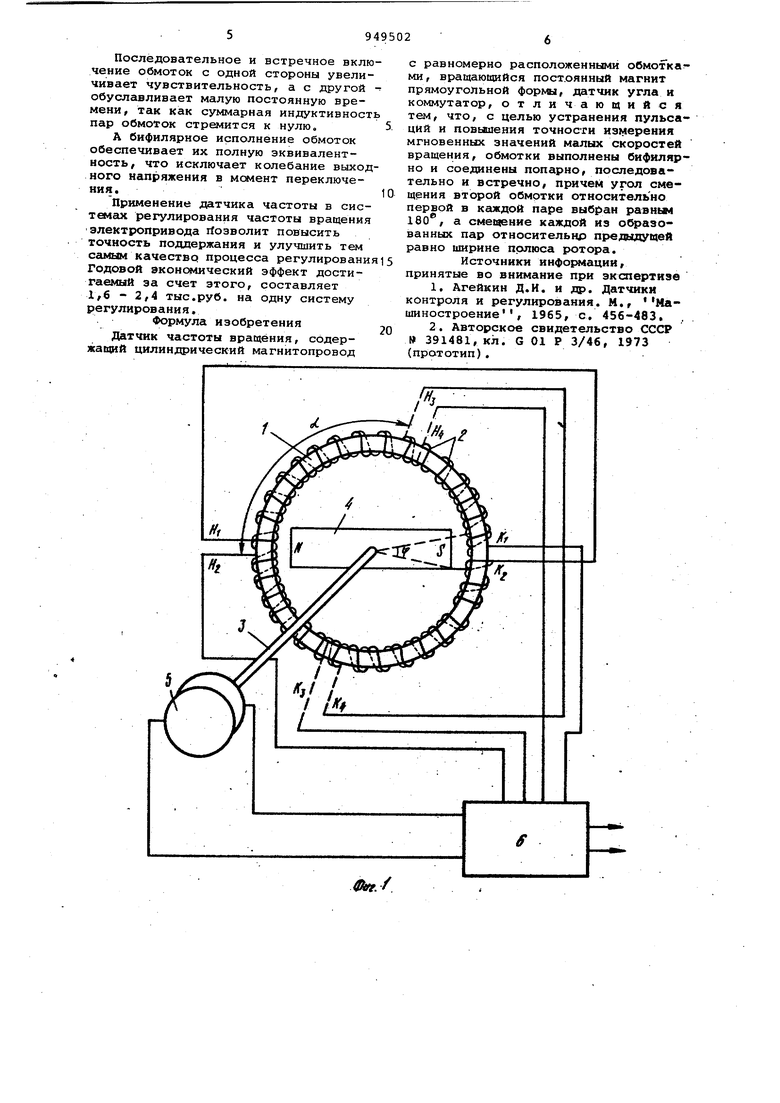
Датчик частоты вращения, содержащий цилиндрический магнитопровод
с равномерно расположенными обмотка ми, вращающийся постоянный магнит прямоугольной формы, датчик угла и коммутатор, отличающийся тем, что, с целью устранения пульсаций и повышения точности измерения мгновенных значений малых скоростей вращения, обмотки выполнены бифилярно и соединены попарно, последовательно и встречно, причем угол смещения второй обмотки относительно первой в каждой паре выб(ан равным 130, а смешение каждой из о азованных пар относительна предыдущей равно ширине полюса ротора.
Источники информации, принятые во внимание при экспертизе
1.Лгейкин Д.И. и др. Датчики контроля и регулирования. М., Машиностроение, 1965, с. 456-483.
2.Авторское свидетельство СССР 391481, кл. G 01 Р 3/46, 1973 (прототип).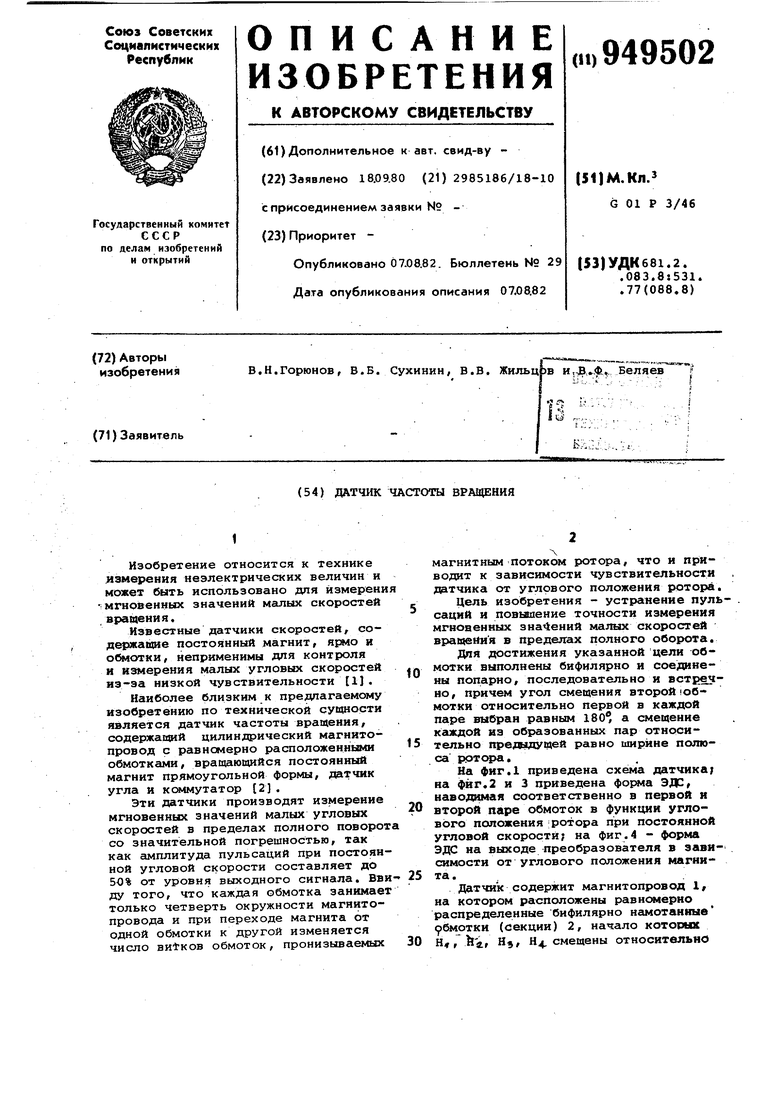
| название | год | авторы | номер документа |
|---|---|---|---|
| Преобразователь угловой скорости | 1982 |
|
SU1105818A1 |
| Магнитомодуляционный датчик угла поворота | 1977 |
|
SU643744A1 |
| Магнитоэлектрический датчик момента | 1978 |
|
SU892592A1 |
| Индукционный редуктосин | 1983 |
|
SU1130960A1 |
| Вентильный электродвигатель | 1977 |
|
SU675544A1 |
| Реверсивный вентильный двигатель | 1979 |
|
SU826513A1 |
| Энергонезависимый датчик углового положения вала | 2023 |
|
RU2807016C1 |
| Энергонезависимый датчик углового положения вала | 2024 |
|
RU2828613C1 |
| Реверсивный бесконтактный тахогенератор постоянного тока и способ его настройки | 1988 |
|
SU1557642A1 |
| Асинхронно-синхронный преобразователь частоты | 1974 |
|
SU692017A1 |