Изобретение относится к вибрационным источникам сейсмических сигналов, применяеГвлм в сейсморазведке при поиске нефтяных газовых и рудных месторождений.
Известны вибрационные источники сейсмических сигналов, содержащие транспортное средство, электрогидравлический возбудитель вибрации, включающий в себя опорную (излучающую) плиту и реактивную массу, злектронный блок управления, содержащий формирователь управляющего сигнала и следящую систему, а также датчики ускорения опорной плиты и относительного перемещения опорной плиты и реактивной массы (датчик массы). Работа источников происходит следующим образом. После запуска источника формирователь управляющего сигнала начинает вырабатывать сигнал управления с установленными.ранее параметрами. .Этот сигнал поступает на вход следящей системл, которая приводит в действие электрогидравлический возбудитель вибрации. Возникающее при этом переменное силовое воздействие через опорную плиту прикладывается к грунту и возбуждает в нем сейсмическую волну. Датчик относительного перемещения опорной плиты и реактивной масси используется для обеспечения рабочего реиима электрогидравлического возбудителя вибрации, а датчик ускорения опорной плиты - для осуще ::твления фазовой синхронизации выходного сигнёша сейсмического источника с сигналом управления С.
Недостаток известных устройств 10отсутствие контроля мощности излучения вибрационного источника, что приводит к значительному колебанию амплитуды сейсмической волны при работе источника на разных частотах,
15 а также при работе его на разных грунтах. Колебания амплитуды сейсмической волны отрицательным образом сказываются на точности и разрешающей способности вибрационного метода сейс20моразведки, поскольку приводят к разрушению функции взаимной корреляции регистрируемых отраженных сейсмических волн с сигналом управления.
Наиболее-близким к упредлагаемому
25 является вибрационный источник сейсмических сигналов, содержащий возбудитель вибрации, включающий в себя реактивную массу и опорную плиту, электронны) блок управления, содержа30щий последовательно соединенные формирователь управляющего сигнала, регулятор уровня возбуждения и следящую систему, а также датчики ускорения опорной плиты и относительного перемещения, опорной плиты и реактивной массы, выходы которых подключены ко входам следящей системы. Для определения мощности излучения сейсмической волны этот источник снабжен контрольным датчиком, расположенным в грунте на небольшой глубине в непосредственной близости от вибрационного источника. Сигнал датчика поступает на управляющий вход регулятора уровня возбуждения, что позволяет автоматически поддерживать задан;ную мощность излучения независимо ОРрабочей частоты 2.
Недостатки этого источника - большая продолжительность подготовки к работе, связанной с необходимостью заглубления контрольного датчика, и низкая точность измерения мощности и излучения,поскольку для ее определеНИН необходимо знать не только амплитуду возбуж;5аемой сейсмической волны но и характеристики грунта.
Цель изобретения - повышение сейсмической эффективности вибрационных источников путем стабилизации мощности излучения в рабочем диапазоне частот.
Указанная цель достигается тем, что вибрационный источник сейсмических сигналов,- содержащий возбудитель вибрации, включающий в себя опорную плиту и реактивную массу, электронный блок управления, содержащий последовательно соединенные формирователь управляющего сигнала, регулятор уровня возбуждения и следящую систему, а также датчики ускорения опорной плиты и относительного перемещения опорной плиты и реактивной массы, выходы которых подключены к входам следящей системы, снабжен интегратором, двухвходовым перемножителем, фильтром низкой частоты, измерителем ускорения реактивной массы и двухвходовым сумматором, первый
вход которого подключен к ВЫХОДУ измерителя ускорения реактивной массы, второй вход соединен со входом интегратора и подключен к выходу датчика ускорения, а выход - к первому входу перемножителя, второй вход которого подключен к выходу интегратора, ;,а выход - к входу фильтра низкой частоты, выход которого соединен с управляющим входом регулятора уровня возбуждения.
Коэффициенты передачи сумматора по входам сигналов ускорения опорной плиты и реактивной массы установлены по величине пропорционально величингам массы опорной плиты и реактивной массы соответственно.
Измеритель ускорения реактивной массы выполнен в виде дополнительного дачтика ускорения, установленного на реактивной массе, или в виде двойного дифференциатора и дополнительного сумматора, один из входов которого подключен к выходу двойного дифференциатора, другой к выходу датчика ускорения опорной плиты, а вход двойного дифференциатора подключен к выходу датчика относительного перемещения опорной плиты и реактивной массы.
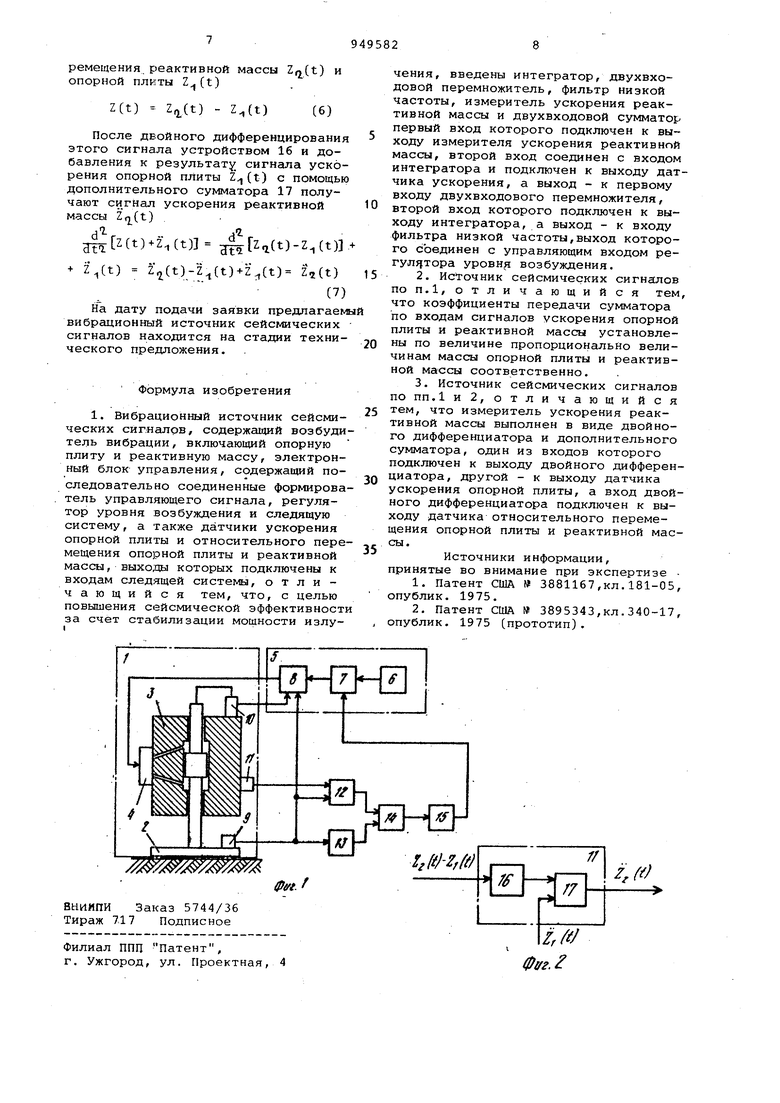
На фиг.1 приведена структурная схема источника сейсмических сигналов; на фиг.2 - один из вариантов исполнения измерителя ускорения реактивной массы.
Источник содержит возбудитель вибрации 1, например, электрогидравлического типа, включающий в себя опорную плиту 2, реактивную массу 3 и электрогидравлический усилитель 4, управляемый электронным блоком управления 5, который содержит формирователь 6 управляющего сигнала, регулятор 7 уровня возбуждения и слдящую систему 8. Источник содержит также датчик 9 ускорения опорной плиты и датчик 10 относительного перемещения опорной плиты и реактивной массы, выходы которых подключены к входам следящей системы 8. Кроме того, источник снабжен измерителем ускорения реактивной массы, выполненным в виде установленного на реактивной массе 3 дополнительного датчика 11 ускорения, сумматором 12, интегратором 13, двухвходовым перемножителем 14 и фильтром низкой частоты 15, выход которого соединен с управляющим входом регулятора 7 уровня возбуждения. Один из выхог,ов сумматора 12 соединен с выходом дополнительного датчика 11 ускорения, а другой соединен со входом интегратора 13 и подключен к выходу датчика 9 ускорения. Выходы сумматора 12 и интегратора 13 подключены к входам перемножителя 14, выход которого соединен с входом фильтра 15 низкой частоты.
На фиг.2 приведен вариант исполнния измерителя 11 ускорения реактивной массы, который состоит из двойного дифференциатора 16 и дополнительного сумматора 17.
Устройство работает следующим образом.
Перед началом работы опорную пли . 2 возбудителя 1 вибрации устанавливаю на грунт.
После запуска вибрационного источника формирователь 6 управляющег сигнала начинает вырабатывать управляющий сигнал, который обычно представляет собой переменное напряжение синусоидальной формы с частотой линейно изменяющейся во времени. Величина сигнала управления устанавливается регулятором 7 уровня возбуж дения, с выхода которого сигнал поступает на вход следящей системы 8, а затем на вход электрогидравлического усилителя 4, приводящего в действие электрогидравлический возбудитель 1 вибрации путем сообщения реак тивной массе 3 возвратно-поступатель ного движения в соответствии с сигналом управления. Возникающее за сче реактивных сил силовое воздействие прикладывается через опорную плиту к грунту, возбуждая в ней сейсмическую волну , Сигналы датчиков 9 и 10, поступающие на входы следящей системы 8, служат для обеспечения рабочего режи ма электрогидравлического возбудителя вибрации 1 и фазовой коррекции выходного сигнала источника. Одновременно сигнал с датчика 9 ускорения расположенного на опорной плите 2, поступает на вход интегратора 13, на выходе которого образует ся сигнал скорости движения опорной плиты Z(t) Jz,(t)dt, где Z(t) - ускорение опорной плиты; Z(t) - скорость опорной плиты. Кроме этого, сигнал ускорения опорной плиты Z(t) вместе с сигнало ускорения реактивной массы (t) , за рабатываемым измерителем ускорения реактивной массы, поступают на вход сумматора 12, который осуществляет и сложение f(t) (t) (t) (2) где (t) - результат сложения; К - коэффициент передачи сумматора по входу сигнала ускорения опорной плиты; KQ - коэффициент передачи сумматора по входу сигнала ускорения реактивной массы. Если коэффициенты К, установить численно равными значениям масс опорной плиты .т и реактивной массы mij соответственно, то результат сложения f(t) представляет собой силу воздействия опорной плиты на грунт, т.е.:(3) (t) (t) + ) ) что следует из рассмотрения уравнения движения возбудителя вибрации как механического устройства, исполь зующего реактивный принцип формирова ния силового воздействия . Затем сигналы Z(t) и ) посту пают на входы перемножителя 14, на выходе которого образуется сигнал N(t), пропорциональный мгновенному значению мощности излучения возбуди теля вибрации N(t) Z(t)-R (t) который в общем случае состоит из двух составляющих: переменной составляющей R(t), пропорциональной реактивной составляющей мощности, которая характеризует интенсивность взаимного обмена энергией между источником силы и реактивными элементами механизма (пружины,массы, а также из постоянной составляющей N(t), пропорциональной активной составляющей мощности - мощности излучения энергии, С помощью фильтра 15 низкой частоты из сигнала N(t) происходит выделение его постоянной составляющей N(t), которая поступает на управляющий вход регулятора 7 уровня возбуждения и осуществляет коррекцию величины сигнала управления в ту или иную сторону при изменении мощности излучения вибрационного источника. Например, при изменении частоты в процессе работы источника или при изменении контактных условий при переезде источника от одной точки возбуждения к другой, происходит изменение (например, уменьшение) излучаемой вибрационным источником мощности, что сразу же приводит к изменению (уменьшению) величины сигнала N(t). Регулятор 7 уровня возбуждения реагирует на изменение величины напряжения N(t) пу.тем изменения (увеличения) сигнала управления таким образом, чтобы обеспечить прежний уровень излучаемой мощности. Таким образом, введение дополнительных измерителя 11 ускорения, сумматора 12, интегратора 13, перемножителя 14 и фильтра 15 низкой частоты позволяет получить сигнал, пропорциональный мощности излучения вибрационного источника и, использовав его для коррекции величины управляющего сигнала, обеспечить постоянный уровень излучаемой источником мощности при изменении частоты управляющего сигнала и изменении характеристик грунта. Дополнительно введенный измеритель ускорения реактивной массы 11 может быть выполнен (фиг.2) в виде двойного дифференциатора 16, на вход которого поступает сигнал Z(t) с выхода датчика 10 относительного ; перемещения, и дополнительного сумматора 17, на входы которого поступают сигналы о выхода двойного дифференциатора 17 и датчика 9 ускорения опорной плиты. Действительно, сигнал датчика 10 относительного перемещения Z(t) прея ставляет собой разность сигналов пе
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибрационный источник сейсмических сигналов | 1986 |
|
SU1543360A1 |
| Вибрационный источник сейсмических сигналов | 1983 |
|
SU1138772A1 |
| Вибрационный сейсмический источник | 1989 |
|
SU1728823A1 |
| Вибрационный источник сейсмических сигналов | 1986 |
|
SU1543361A1 |
| Вибрационный источник сейсмических сигналов | 1986 |
|
SU1405001A1 |
| Вибрационный источник сейсмических сигналов | 1985 |
|
SU1277037A1 |
| Сейсмический вибратор | 1981 |
|
SU1010582A1 |
| Устройство управления вибрационным источником сейсмических сигналов | 1977 |
|
SU661460A1 |
| Способ управления амплитудой выходного сигнала вибрационного источника сейсмических сигналов и устройство для его осуществления | 1983 |
|
SU1163289A1 |
| Вибрационный источник сейсмических сигналов | 1985 |
|
SU1277034A1 |
