1
Изобретение относится к угледобывак щей промышленности и предназначено для автоматизации управления режимами работы привода горных и других машин.
По основному авт. св. № 757706j
известно устройство, содержащее регулирования по скорости подачи, вкл1очающйй задатчик и датчик скорости подачи, элемент сравнения сигналов скорооти подачи, на выходе которого включены ю релейные усилители утфавления сервоприводом механизма подачи, реле контроля пр&вышения фактической скорости подачи над заданной, элементы выделения наибольшего и наименьшего стсгналов, и канал 15 регулирования по нагрузке, включающий
зацатчик и датчик нагрузки, элемент cpafrнения но нагрузке, на выходе которого включены релейные элементы недогрузки И перегрузки, привод механизма по- 20 дачи, дополнительный элемент выделиНИИ наибольшего сигнала, первый вход которого соединен с релейным элементом н&яогрузки, втортй вход - с датчиком ско- рости подачи, а выход подключен к одному из входов реле контроля превышения фактической скорости над заданной, другой вход которого через элемент выделения наименьшего сигнала подключен к выходу релейного элемента перегрузки, причем выход реле контроля превышения фактической скорости над заданной через элементы выделения наибольшего сигнала подключен на выходы элемента сравнения сигналов скорости подачи l .
Однако устройству присущи следуюохнв недостатки.
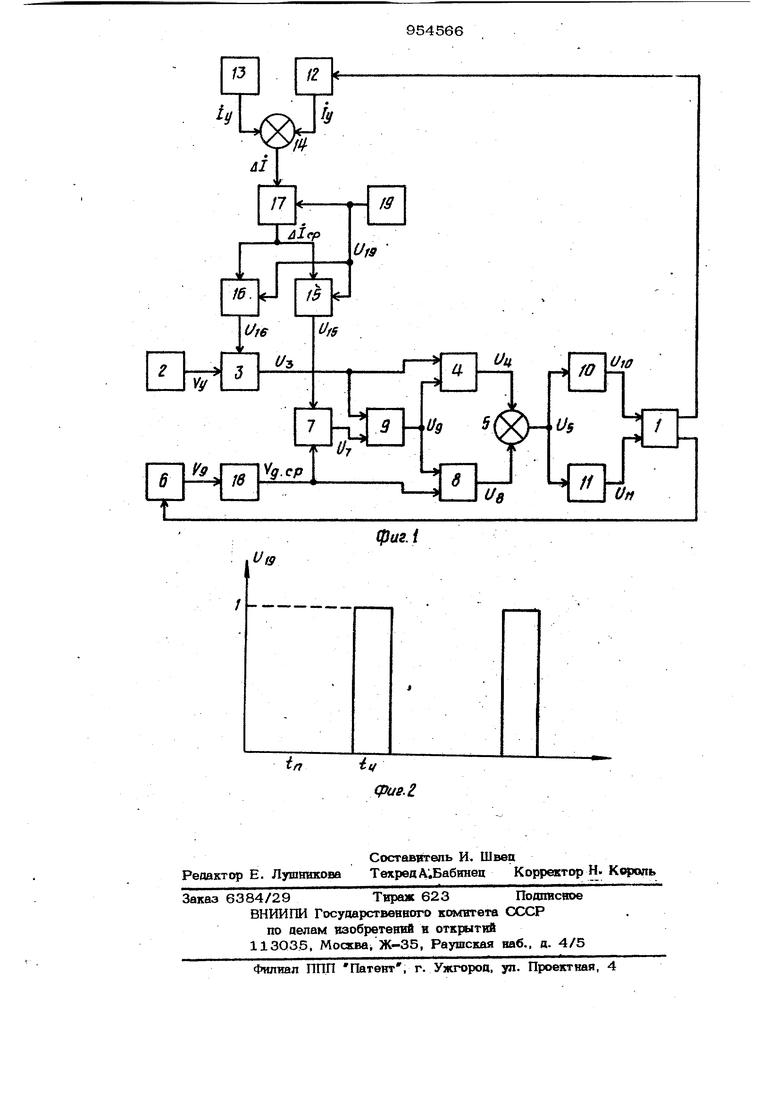
В -первых, в с;вязи с особенностями процесса резания угля и переметав ння машины вдоль забоя, сигнал рассогласования по нагрузке состоит из медленно меняющегося среднего значения (полезны) сигнал) и периодической сост 1вляютаей (помеха), характеризующейся достаточной большой амплитудой и переменной , изменяющейся в процессе перемещения машитял от 0,5 до 3 Гп. Геакция устройств (la периодическую сосгавпяк шую в cwiy инерционных свойств объекта приведег к появлешпо в системе автоколебантий, т. е. Существенно снизится . качество стабилизации нагрузки электродвигателя резания. Причем, в силу переменности частоты колебаний периодической составляющей введение в устройство пассивного фильтра, настроенного на определенную постоянную частоту, либо не устранит указанныхавтоколебаний, ли бо существенно повысит инерционность i всей системы. Во-вторых, устройство может быть применено только на машинак с жесткой механической характеристикой привода подачи (например, с гидроприводом подачи) у которых скорость подачи практически не зависит от сил сопротивления. У ма же с мягкой механической характеристикой привода подачи (например, с электроприводом подачи, базирующемся на сериесном двигателе постоянного тока или электромагнитной муфты скольжения) скорость подачи зависит от сил сопротивления и потому состоит из медленно меняющегося среднего значения и периодической составляющей, характеризующейся достаточно большой амплитудой и пере менной частотой, изменяющейся в процеосе перемещения машины от 0,5 до 3 Гц. В силу инерционных и нелинейных свойств электропривода подачи сглаживания составляющей может быть осуществлено толь ко путем существенного усложнения канал а регулирования по скорости подачи, и при этом высокое качество стабилизации скорости подачи не всегда может , быть достигнуто. В то же время резупьтаты исследований показывают,что перио дическая со :тавляющая не оказывает влия ния на работу канала регулирования по нагрузке, и, следовательно, управление машиной можно вести только по средней скорости подачи. Применение для этой цели пассивного фильтра, настроенногона определенную постоянную частоту, приведет к тому же эффекту, что и в канале регулирования по нагрузке. Цель изобретения - расширение области применения устройства. Поставленная цель достигается тем, что в устройство автоматического управлеш я выемочной машиной, введены генератор им1 ульсов, блок выделения среднего значения сигнала рассогпасоваН1 я по и блок выделения среднего значения скорости подачи, выход которого соединен со вторым входом элемента выделения наибольшего сигнала и вторым входом выделения дополнительного элемента выделения наибольшего сигнала, вход блока выделения среднего значения скорости подачи подключен к выходу датчика скорости подачи, генератор импульсов выходом соединен с первыми входами релейных элементов недогрузки 11 перегрузки, со вторыми входами которых соединен выхоД блока выделения среднего значения сигнала рассогласования по нагрузке, первый вход которого подклку- ; чен к выходу элемента сравнения по пат рузке, а второй вход - к выходу генератора импульсов. На фиг. 1 представлена функциональная схема устройства управления выемочной машиной ; на фиг. 2 - выходной сигнал генератора 1мпульсов. Устройство управления выемочной ма- . шиной 1 содержит каналы регулирования по нагрузке и скорости подачи. Канал- регулирования по скорости подачи включает задатчик 2 скорости подачи, элементы выделения 3 и наибольшего 4 сигналов, элемент 5 сравнения, датчик 6 скорости подачи, элементы 7 и 8 выделения наибольшего сигнала, реле 9 контроля превышения фактической скорости подачи над заданной и трехпозипионный релейный элемент, состоящий из двух релейных усилителей 10 и 11, управляющих сервоприводом механизма подачи. Канал регулирования. по нагрузке содержит датчик 12 нагрузки, задатчик 13 нагрузки, элемент 14 сравнения по нагрузке и релейные элементы 1 5 контроля недогрузки и элементы 16 контроля электродвигателя резания. -Для повышения качества регулирования и расширения области применения устройства дополнительно включе 1ы блок выделения среднего значения сигнала рассогласования по нагрузке 17, блок 18 выделения среднего значения скорости подачи и генератор 19 импульсов, при этом первый вход блока выделения среднего значения сигнала рассогласования по нагрузке связан с выходом элемента 14 сравнения по нагрузке, а выход - с первыми входами элементов контроля недогрузки и перегрузки 1 б электродвигателя резания, вход блока среднего значения скорости подачи присоединен с выходу датчика 6 скорости подачи, а выход - ко входам элементов 7 И 8 выделе шя наибольшего i::nv-H-ijia, выход генератора Шушульсов подключен ко вторым входам блока 17 выделения сре пего значения сигнала рассогласования по нагрузке и элементов недогрузки 15 я перегрузки 16 электродвигателя резания. Блок 17 выделения среднего значения сигнала рассогласования по нагрузке мо жет представлять собой либо известный (аналоговый или цифровой) вычислитель среднего значения с памятью, либо соединение импульсного элемента, вырабатывакяцего единичные импульсы одинаковой длительности, по назной полярности, соответствующих счетчиков и памяти. В первом случае выходом блока 17 является сигнал пропорциональный непосредственно среднему значению сигнала рассогласования по нагрузке, а во втором - сигнал выраженный через разность положительных и отрицательных единичных импульсов. При любом способе реализации блока 17 основной ггриншш его работы заключается в следующем: во время Л tl ср -той паузы генератора 19 импульсов производится измерение сигнала i 3 , расчет и запоминание сигнала , во время -( -ого импульса блок выделения среднего значения сиг нала рассогласования отсоединяется от выхода элемента сравнения по нагрузке 14 и возвращается в исходное (нулевое) состояние, при этом вычисленный во время i -ой паузы сигнал дПф подается на первые входы ,элементов 15 и 16 вплоть до окончания ( +1)-той па зы, т. е. смена значения сигнала происходит с частотой работы генерато ра 19 импульсов. Такой принцип обуслов лен, во-первых, тем фактом, что при регулировании по нагрузке основное зна-у чение имеет не оперативность, а качест во регулирования, во-вторых, возросшими мощностями привода резания выемочных машин, что позволяет стабилизировать не мгновенные значения нагрузки, а в среднем по длине лавы. Поскольку при регулировании по скорости подачи основное значение имеет оперативность управления, блок выделения среднего значения скорости подачи 18 непрерывно измеряет входной сигнал УЙ, однако сигнал на его .выходе nt является только в те моменты времени, когда периодическая составляющая сигнала Vrf равна нулю, чем достигается вэ- мерение именно среднего значения скороо ти подачи. Учитывая инерционность привод подачи, а также тот факт, что частота сме- 9 6 ны информации на выходе блока 18 в двл раза выше частоты всэменения пернодвчео кой составляющей сигнала V , можно утверждать, что при любом типе привода подачи на входе апемектов 7 и 8 имеет место непрерывный сигнал, пропорциональный среднему значению скорости подачн выемочной машины. Генератор 19 импульсов представляет робой известный элемент, выходной сиг- щл которого характеризуется следУюпхвми параметрами (фиг. 2): длительность . импульса ( ty ) равна времени, которое необходимо для изменения скорости пода чи на заранее заданную величину (ступень ino скорости подачи), а длительность паузы {t(,) - наибольшему периоду изменений периодической составляющей сигнала рассогласования по нагрузке. Устройство работает i следующим образом. Если при VCP в конце i -той паузы на выходе блока 17 сформировался сигндл . , больший первого порого вого значения элемента перегрузки 16, то независимо от значения сигнала U сигнал U ,5 Ю, а U, (x- -Дв Vyrnax максимальное напряжение установки скорости .подачи,Vi, Vij, U «Vg.™, ,U, U,U9-V и 5 0/изйенениа скорости подачи не происходит. Если приУлср в конце i -той . паузы сигнал больше второго порогового значевсия элемента 16, то независимо от значения сигнала сигналы 0,5 U(fc 0, и/ 0,.cpUq O, Уд 0., .cp,, включается один из элементов 10 и 11 в сторону уменьшения скорости подачи, причем это уменьшение будет происходить до конца ( i +1)-той паузы. Если .при tf.cp Vg в конце -i -той паузы сигнал Л Э.р больше первого, но меньше второго пороговых значений и;, 1, элемента 16, то при имеем: U,,f,0,U,.0,U,Vg.,p, ,,,U6-0 включается один из элементов 10 и 11 в сторону, уменьшения скорости подачи, У. О имеет: u,.u,u,u,-v,, (поскольку в результате уменьшения скорости подачи, произведенного на прецы душем шаге. ,U(Jj,Lfg Uj, U J О, изменение скорости подачи не происходит. Следовательно; в этом случае изменение скорости подачи происко пит юлько при наличии импульса, что обуславливает уменьшение скорости подачи на заданную величину (ступень). Если npnVrf.cp у в конце -той паузы сигнала меньше второго порогового значения элемента 15, то независимо от значения сигнала U (д сигналы U,B-U|b U,,, Ug 0, ,Ug -Yycp, и 5 0, изменеште скорости подачи не происходит. Если при Vg-.cp Vg b конце -( -той паузы сигнад Д-Jcp больше второго, но меньше первого поро говых значений эпе мента 15, то при . 1 имеем;U (-Ц ,,;,, Мз -0. .,Uj-O. а прии, 0, имеем |J( ..ЦЗ-УУ ,U7-Yg,p,Ll9(Jrn.U4Um. Ug- iJj, и5 -О, т. е. в этом случае , изменете скорости подачи не происходит Если Ту в конце -i -той паузы сигнал Л- р больше первого порогового значения элемента 15, но меньше первого порогового значения эле мента 16, то независимо от значения сигн ла uDcp имеем: U tj О, U |е U , U з Yq , ..и ., . , изменение скорости подачи не происходит. , Если конце -i. -той паузы сигнал u.l с р больше первого порогового значения элемента 15, но меньше первого порогового значения элемента 16, то независимо от значения сигнала ,U|2 O, IJ-i-Yy ,.cp .,,Ug--Y cp Yg О, скорость подачи уменьшается до тех пор, пока сигнал рассогласования по скорости не ста нет меньше зоны нечувствительности эле ментов 10 к 11. ЕСЛ.И при Yrt. конце н -той паузы сигнал дПср меньше второго поропэвого значения элемента 15, то не рависимо от значения сигнала U j имеем и,5-и,ь и .U,-V,j -Un-O, u 0. u Yy ,(. Ue 0 скорость подачи увеличивается, причем это увеличение происходит либо до окончания ( 4+1 )ТОЙ паузы, когда протЕзойдет смена информашга на выходе элементов 15 та 16, либо до тех пор, пока сил нал рассогласования по скорости не станет меньше зоны нечувствительности элементов 1О и 11. Q 6e8 Если npHYgcp f Yy в конце 1 -той паузы сигнал больше второго, но меньше первого пороговых значений элемента 15 то при U jg 1 имеем: U,,e,U, , Ц. Uf , U9 0, 1(4-Уу Ug Vg.cp. , скорость подачи увеличивается, ,а при U О, имеем: U ,5 0, U | Um , (J 3 Yy , .y...CpU 5 Um.U4 UR L/n, U 0:, изменение скорости подачи не происходит. Таким ооразом, в этом случае изменение скорости подачи происходит только при наличии импульса, что обуславливает увеличение скорости подачи на заданную величину (ступень). Приведенные описания принципов работы вновь вводимых блоков и всегр устройства- в целом показывают, что использование блока выделения среднего значения .сигнала рассогласования по нагрузке, блока выделения среднего значения скорости подачи и генератора импульсов в соединении с улсе известными элементами выгодно отличает предлагаемое устройство от прототипа, так как позволяет повысить качество регулирования по нагрузке и расширить область применения устройства при сохранении оперативности в управлении скоростью подачи. Формула изобретения Устройство автоматического управле- Ния выемочной машиной по авт. св. № 757706, отли. чаюшееся тем, что, с целью расширения области применения устройства, в него введены генератор импульсов, блок И)Шеления среднего значения сигнала рассогласования по нагрузке и блок выделения среднего значения, скорости подачи, выход которого соединен с вторым .входом элемента выделения наибольшего сигнала и вторым входом выделения дополнительного элемента выделения наибольшего сигнала, вход блока выделения среднего значения скорости подачи подключен к выходу датчика скорости подачи, генератор импульсов выходом соединен с первыми входами релейных элементов недогрузки и перегрузки, с вторыми входами которых соединен выход блока выделения среднего значения сиг нала рассогласования по нагрузке, первый вход которого подключен к выходу элемента сравнения ло нагрузке, а второй вход к выходу генератора импульсов. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР ,лГ9 757706, кл. Е 21 С 35/24, 1978 прототип).
фаг. i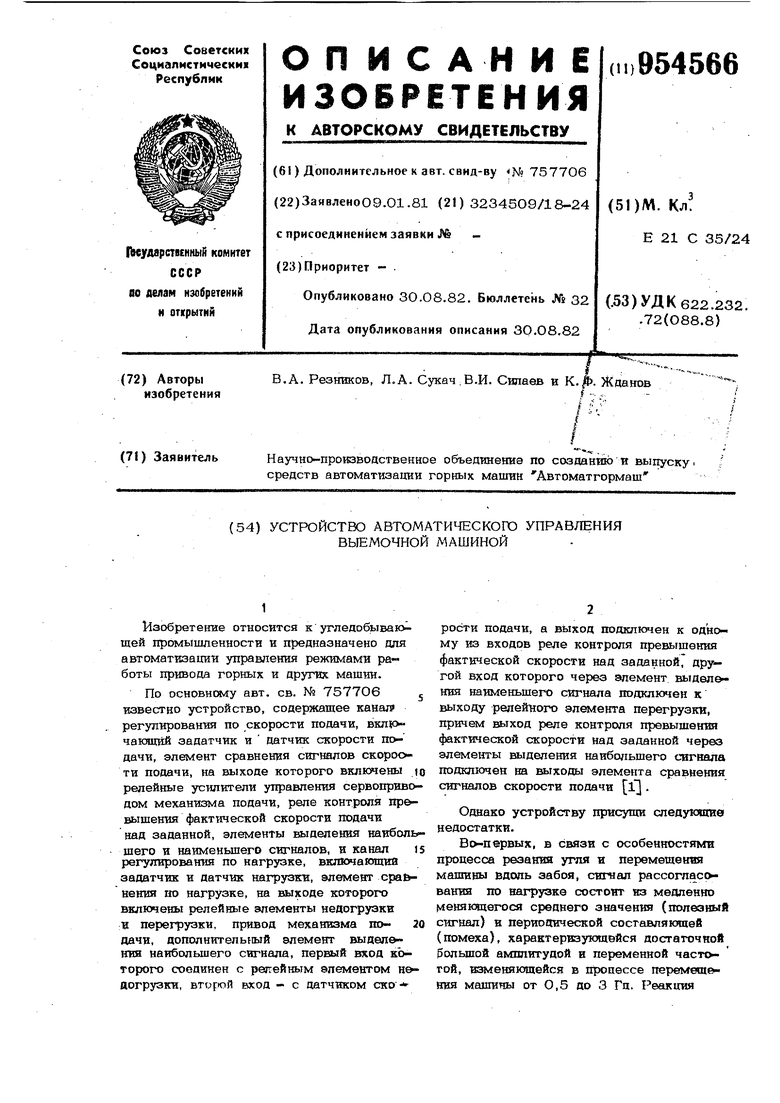
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления скоростью подачи угледобывающего комбайна | 1986 |
|
SU1518511A1 |
| Устройство автоматического управления выемочной машиной | 1982 |
|
SU1078064A1 |
| Устройство автоматического управления выемочной машиной | 1977 |
|
SU750065A1 |
| Устройство автоматического управления выемочной машиной | 1980 |
|
SU877000A1 |
| Устройство автоматического управления выемочной машиной | 1986 |
|
SU1352054A1 |
| Устройство управления электромагнитной муфтой привода горной машины | 1984 |
|
SU1190027A1 |
| Автоматический регулятор нагрузки горной машины | 1981 |
|
SU1076578A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2017 |
|
RU2658678C1 |
| Двухканальное устройство для управления технологическим объектом | 1978 |
|
SU723513A1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛЯТОР НАГРУЗКИ ГОРНОЙ МАШИНЫ | 1971 |
|
SU317794A1 |