Изобретение относится к электротехнике и может быть использовано в исполнительных системах различных механизмов на базе бесконтактных электродвигателей постоянного тока.
Известна система управления бесконтактного двигателя постоянного тока [патент РФ №2098917, кл. Н02Р 6/10, 10.12.97, бюл. №34. ЗАО «КИМ». В.Г. Константинов, В.А. Прядкин. Цифровая система управления вентильным двигателем], содержащая двигатель, инвертор, датчик положения ротора с цифровым преобразователем сигнала и микро-ЭВМ, реализующую алгоритмы управления при трогании двигателя, разгоне, торможении и в стационарном режиме. Недостатком системы управления является то, что данная система не может реализовать широкий диапазон регулирования скорости двигателя и качество движения на малых скоростях из-за низкой информативности сигнала обратной связи по положению, определяемой наличием 3-х выходов датчика положения ротора.
Известен электропривод [авторское свидетельство СССР №1829101, кл. Н02Р 5/00, 23.07.93, бюл. №27. Ю.Е. Залетный, В.В. Мартынов, К.Г. Камалендинов, С.Н. Соловьев. Вентильный электропривод], содержащий электродвигатель с датчиком положения ротора, преобразователь код-ШИМ, коммутатор, датчик положения исполнительного механизма, а также функциональные элементы, реализованные с использованием программного вычислителя: устройство определения ошибки по положению, устройство определения направления вращения, устройство определения рассогласования по скорости и устройство определения скорости двигателя с цифровым выходом.
Недостатком электропривода является то, что он не позволяет отрабатывать заданные перемещения с высокой плавностью движения, т.к. система коммутации обмоток двигателя осуществляется по сигналам всего лишь трех элементов датчика положения ротора, что приводит к пульсациям движущего момента и, как следствие, к неравномерному вращению на малых скоростях. Кроме этого, практическая реализация преобразователя код-ШИМ накладывает ограничение на величину минимального приращения ШИМ-сигнала, связанного с дискретностью кода и частотой ШИМа. Ограниченная величина минимального приращения ШИМ-сигнала не позволяет формировать малые приращения управляющих воздействий, необходимых для регулирования двигателя при движении на малых скоростях.
Наиболее близким к изобретению является бесконтактный электропривод постоянного тока [патент РФ №2331963, кл. Н02Р 6/10, Н02Р 6/16, Н02Р 6/22, 20.08.08, бюл. №23. А.С. Гончаров, Э.Г. Кузнецов, С.М. Миронов, В.В. Романов. Бесконтактный электропривод постоянного тока], содержащий электродвигатель, коммутатор, преобразователь «код-ШИМ», устройство формирования цифрового сигнала скорости, устройство формирования направления вращения, датчик положения, преобразователь сигнала обратной связи по положению в код, устройство определения ошибки по положению, устройство определения рассогласования по скорости, сумматор, счетчик тактов, последовательно соединенные устройство выделения модуля и устройство формирования кода управления на каждом такте, причем первый вход устройства определения ошибки по положению служит для подключения внешнего устройства задания входного кода, второй вход устройства определения ошибки по положению подключен к выходу преобразователя сигнала обратной связи по положению в код, выход устройства формирования цифрового сигнала скорости подключен ко второму входу устройства определения рассогласования по скорости, датчик положения установлен на валу электродвигателя, выход датчика положения подключен к входу преобразователя сигнала обратной связи по положению в код, выход которого подключен к первому входу сумматора и входу устройства формирования цифрового сигнала скорости, выход которого подключен к второму входу сумматора, выход устройства определения рассогласования по скорости подключен к входам устройства выделения модуля и устройства формирования направления вращения, выход счетчика тактов подключен ко второму входу устройства формирования кода управления на каждом такте, выход которого подключен к входу преобразователя «код-ШИМ», коммутатор содержит последовательно соединенные устройство деления на постоянный коэффициент, устройство определения номера зоны коммутации на каждом такте, дешифратор, логическое устройство и инвертор, выходы которого подключены к фазным обмоткам электродвигателя, причем выход сумматора подключен к входу устройства деления на постоянный коэффициент, выход устройства формирования направления вращения подключен ко второму входу устройства определения номера зоны коммутации на каждом такте, выход счетчика тактов подключен к третьему входу устройства определения номера зоны коммутации на каждом такте, а выход преобразователя «код-ШИМ» подключен к входу управления логического устройства, которое подключает сигналы управления к ключам инвертора на время действия импульса ШИМ и переводит инвертор в режим динамического торможения на время паузы.
При подаче на первый вход устройства определения ошибки по положению линейно-измеряющего сигнала задания положения, электропривод в установившемся режиме будет двигаться со скоростью, определяемой темпом изменения сигнала задания.
Недостатком электропривода является то, что он не обладает достаточной жесткостью по углу при воздействии момента нагрузки при движении на малых скоростях; при этом ошибка по угловому положению при воздействии момента нагрузки растет. Это обусловлено режимом прерывистых токов, возникающим при отработке малых скоростей, когда управляющие импульсы ШИМ в ключах инвертора достаточно узкие и за время паузы, в которой осуществляется динамическое торможение, ток падает до нулевого значения, при этом жесткость механической характеристики электродвигателя уменьшается. Кроме того, при движении на малых скоростях ухудшаются динамические характеристики электропривода вследствие изменения параметров системы регулирования в режиме прерывистых токов.
Техническим результатом, на достижение которого направлено изобретение, является увеличение жесткости электропривода по углу при воздействии момента нагрузки (уменьшение ошибки по угловому положению вала) и улучшение динамических характеристик при движении на малых скоростях.
Технических результат достигается тем, что в бесконтактный электропривод постоянного тока, содержащий электродвигатель, коммутатор, преобразователь «код-ШИМ», устройство формирования цифрового сигнала скорости, устройство формирования направления вращения, датчик положения, преобразователь сигнала обратной связи по положению в код, устройство определения ошибки по положению и устройство определения рассогласования по скорости, первый сумматор, счетчик тактов, последовательно соединенные первое устройство выделения модуля и устройство формирования кода управления на каждом такте, причем первый вход устройства определения ошибки по положению служит для подключения внешнего устройства задания входного кода, второй вход устройства определения ошибки по положению подключен к выходу преобразователя сигнала обратной связи по положению в код, выход устройства формирования цифрового сигнала скорости подключен ко второму входу устройства определения рассогласования по скорости, датчик положения установлен на валу электродвигателя, выход датчика положения подключен к входу преобразователя сигнала обратной связи по положению в код, выход которого подключен к первому входу первого сумматора и входу устройства формирования цифрового сигнала скорости, выход которого подключен к второму входу первого сумматора, выход устройства определения рассогласования по скорости подключен к входам первого устройства выделения модуля и устройства формирования направления вращения, выход счетчика тактов подключен ко второму входу устройства формирования кода управления на каждом такте, выход которого подключен к входу преобразователя «код-ШИМ», коммутатор содержит последовательно соединенные устройство деления на постоянный коэффициент, устройство определения номера зоны коммутации на каждом такте, дешифратор, первое логическое устройство и инвертор, выходы которого подключены к фазным обмоткам электродвигателя, причем выход первого сумматора подключен к входу устройства деления на постоянный коэффициент, выход устройства формирования направления вращения подключен ко второму входу устройства определения номера зоны коммутации на каждом такте, выход счетчика тактов подключен к третьему входу устройства определения номера зоны коммутации на каждом такте, а выход преобразователя «код-ШИМ» подключен к входу управления первого логического устройства, которое подключает сигналы управления к ключам инвертора на время действия импульса ШИМ и переводит инвертор в режим динамического торможения на время паузы, дополнительно введены последовательно соединенные релейный элемент и второй сумматор, последовательно соединенные второе устройство выделения модуля, устройство умножения и третий сумматор, последовательно соединенные третье устройство выделения модуля и второе логическое устройство, выход устройства определения ошибки по положению соединен со входами релейного элемента, второго и третьего устройств выделения модулей, со вторыми входами второго и третьего сумматоров, и вторым входом устройства умножения, выходы второго и третьего сумматоров соединены соответственно с первым и вторым входами второго логического устройства, которое подключает сигналы с выходов второго или третьего сумматоров к первому входу устройства определения рассогласования по скорости, соответственно, при больших и малых сигналах на выходе третьего устройства выделения модуля.
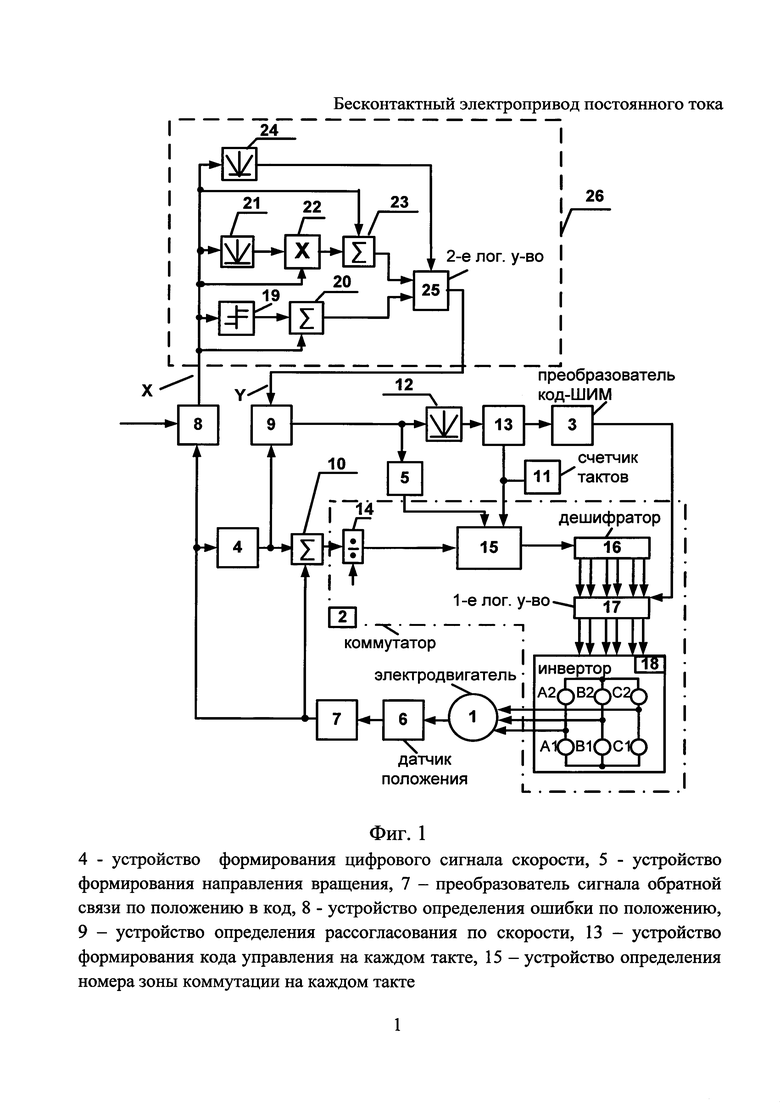
Работа устройства поясняется чертежами, где на фиг. 1 изображена схема электропривода; на фиг. 2 - фиг. 4 - блок-схемы алгоритмов работы функциональных элементов электропривода, на фиг. 5 - вид характеристики, формируемой дополнительно введенными функциональными элементами.
Бесконтактный электропривод постоянного тока (фиг. 1) содержит электродвигатель 1, коммутатор 2, преобразователь 3 «код-ШИМ», устройство 4 формирования цифрового сигнала скорости, устройство 5 формирования направления вращения, датчик 6 положения, преобразователь 7 сигнала обратной связи по положению в код, устройство 8 определения ошибки по положению, устройство 9 определения рассогласования по скорости, первый сумматор 10, счетчик 11 тактов, первое устройство 12 выделения модуля, устройство 13 формирования кода управления на каждом такте, устройство 14 деления на постоянный коэффициент, устройство 15 определения номера зоны коммутации на каждом такте, дешифратор 16, первое логическое устройство 17, инвертор 18, релейный элемент 19, второй сумматор 20, второе устройство 21 выделения модуля, устройство 22 умножения, третий сумматор 23, третье устройство 24 выделения модуля и второе логическое устройство 25.
Функциональные элементы 3-5, 8-17, 19-25 реализованы с использованием микроконтроллера.
Функциональные элементы 19-25 образуют преобразователь 26 сигнала.
Электропривод работает следующим образом.
На первый вход устройства 8 определения ошибки по положению (фиг. 1) подается текущий код заданного положения, а на второй вход - код, несущий информацию об угловом положении ротора электродвигателя 1, полученный с помощью датчика 6 положения и преобразователя 7 сигнала обратной связи по положению в код. В результате на выходе устройства 8 определения ошибки по положению образуется сигнал разности указанных кодов, который подается через преобразователь 26 сигнала на первый вход устройства 9 определения рассогласования по скорости. Устройство 4 формирования цифрового сигнала скорости вырабатывает сигнал производной по угловому положению вала электродвигателя 1, который подается на второй вход устройства 9, где с определенным коэффициентом вычитается из сигнала ошибки по положению, в результате чего на выходе устройства 9 формируется управляющий сигнал. На выходе устройства 12 формируется модуль управляющего сигнала, а на выходе устройства 5 - знак управляющего сигнала (сигнал, задающий направление вращения).
Счетчик 11 тактов осуществляет подсчет циклов работы с выдачей номера такта n. При этом происходит циклическое накапливание n от 0 до nmax со сбрасыванием счетчика в ноль.
Первый сумматор 10 осуществляет алгебраическое суммирование сигнала угла поворота вала электродвигателя 1 и сигнала производной от угла поворота, поступающего с устройства 4 формирования цифрового сигнала скорости. Последний сигнал, подаваемый на первый сумматор 10 с определенным весом, используется в качестве сигнала опережения включения.
Положение результирующего вектора тока статора бесконтактного двигателя постоянного тока определяется зонной коммутацией, номер которой в свою очередь определяется комбинацией открытых и закрытых ключей инвертора, питающего фазные обмотки.
Суммарный сигнал угла поворота и угла опережения включения поступает с выхода первого сумматора 10 на вход устройства 14 деления на постоянный коэффициент.
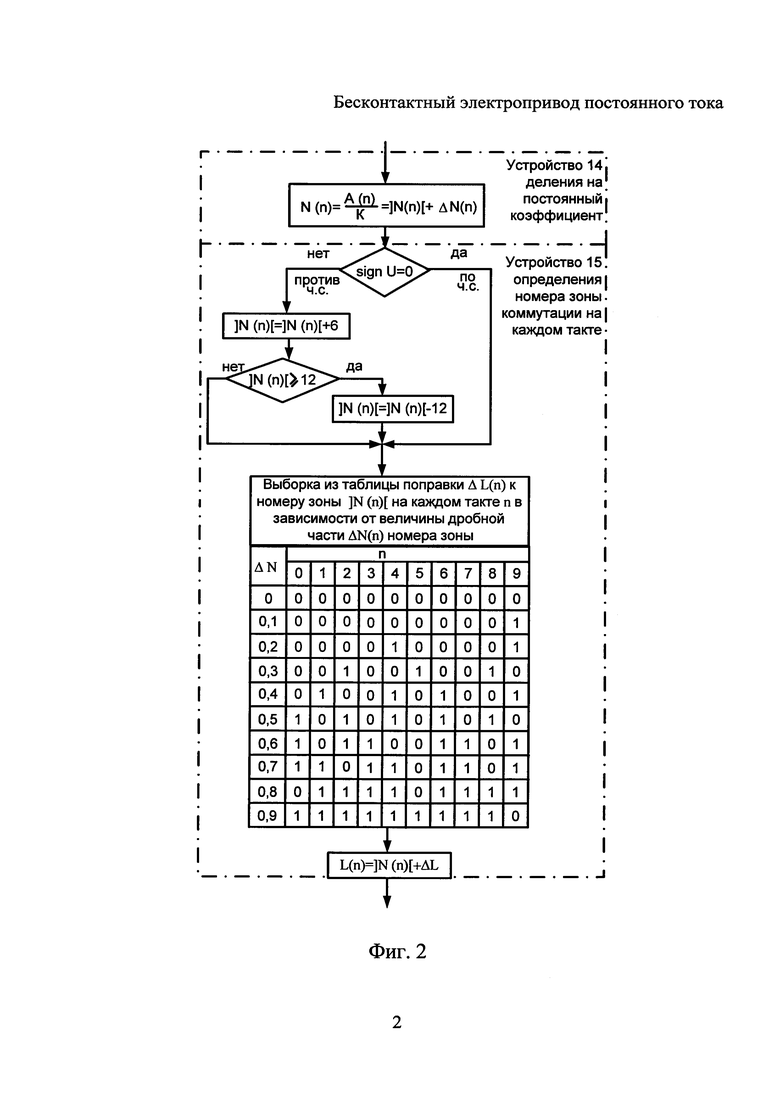
Работа устройства 14 деления и устройства 15 определения номера зоны коммутации на каждом такте поясняется блок-схемой алгоритма, приведенного на фиг. 2.
Постоянный коэффициент (делитель) K в устройстве 14 деления для 12-зонной коммутации равен одной двенадцатой части от максимального значения кода углового положения, соответствующего одному электрическому обороту ротора двигателя. В результате деления кода числа А(n), являющегося суммой текущего угла поворота и угла опережения включения образуется число N(n), целая часть которого ]N(n)[ несет информацию о номере зоны коммутации, а дробная часть ΔN - об относительном угловом положении ротора электродвигателя внутри зоны. Далее устройство 15 в соответствии с алгоритмом, представленным на фиг.2 осуществляет логический анализ знака управляющего сигнала, поступающего с выхода устройства 5 формирования направления вращения. Принято, что при sign U=1, вращение осуществляется против часовой стрелки, sign U=0 - по часовой стрелке. Если sign U=1, то к числу ]N(n)[ прибавляется число 6, что соответствует повороту ротора датчика положения относительно ротора двигателя на 180° и, что приводит к изменению чередования включения ключей инвертора и, как следствие, к вращению ротора двигателя против часовой стрелки. При этом, если для sign U=1 новое ]N(n)≥12[, то оно корректируется в соответствии с блок-схемой алгоритма таким образом, чтобы оставаться в рамках 12 зон. Затем устройство 15 определения номера зоны коммутации на каждом такте по величине относительно углового положения внутри зоны коммутации ΔN и по номеру такта n определяет величину поправки ΔL на каждом такте к номеру зоны ]N(n)[. Для реализации данного алгоритма в памяти микроконтроллера сформирована таблица, из которой осуществляется выборка величины поправки ΔL. Поправка принимает значения либо 0, либо 1 и прибавляется к номеру зоны ]N(n)[.
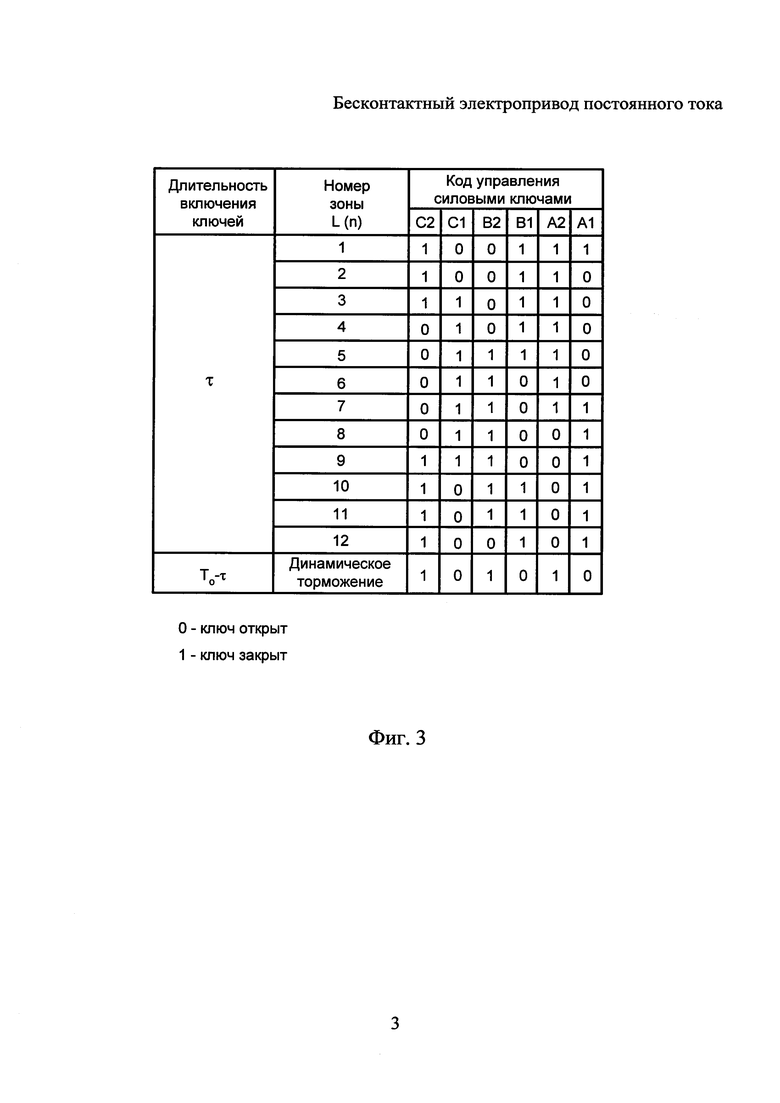
Дешифратор 16 выдает сигналы управления ключами А1 А2 В1 В2 С1 С2 инвертора по номеру зоны L(n) в соответствии с таблицей, приведенной на фиг. 3. Сигналы управления ключами A1 А2 B1 В2 C1 С2 поступают на входы первого логического устройства 17, которое подключает их к ключам инвертора на время т действия импульса ШИМ и переводит инвертор в режим динамического торможения на время (Тo-τ) паузы (где Тo - период ШИМа). При этом происходит переключение с одной зоны коммутации на другую и количество тактов, определяющих тот или другой номер зоны, а значит и время нахождения ротора электродвигателя 1 в той или другой зоне, зависит от величины дробной части номера зоны, соответствующей относительному угловому положению ротора. При достаточно высокой частоте ШИМ пульсации вектора результирующего тока электродвигателя малы, а значит малы и пульсации движущего момента, что обуславливает плавность движения на малых скоростях.
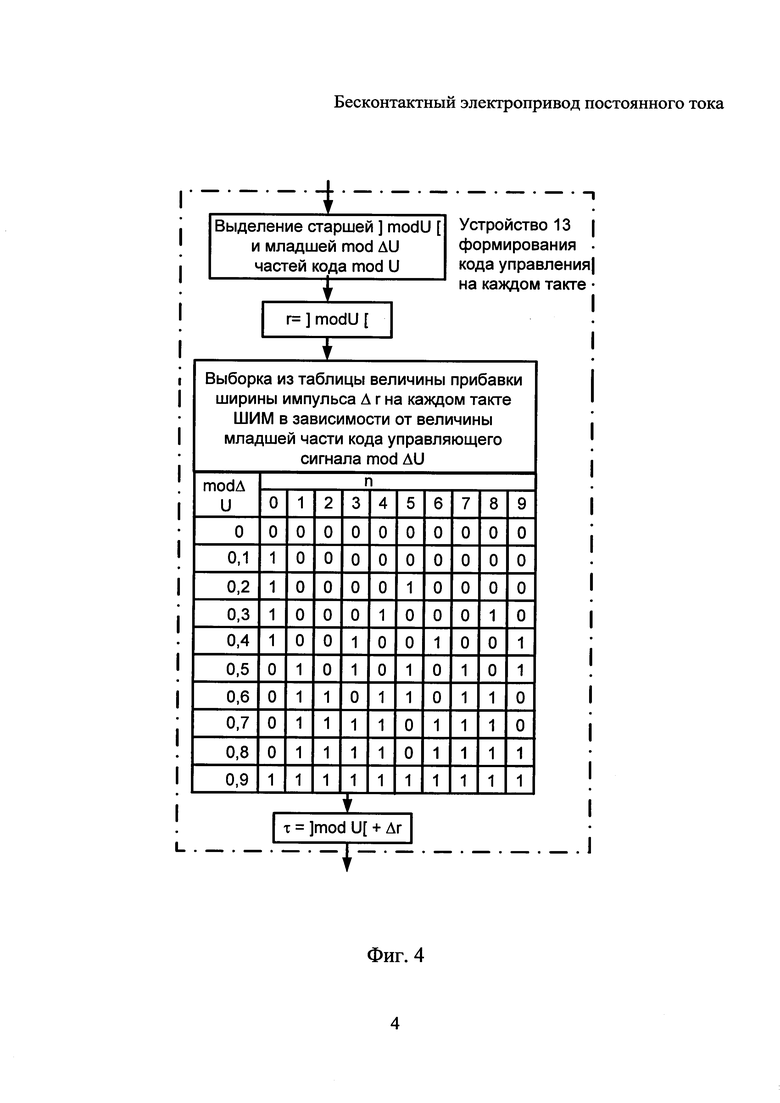
Практическая реализация преобразователя «код-ШИМ» приводит к тому, что частота ШИМ и минимальное приращение длительности импульса являются взаимосвязанными параметрами: чем выше частота ШИМ-сигнала, тем больше величина «ступеньки» преобразователя, соответствующая единице младшего разряда входного кода.
Функциональные элементы 12, 13 и 3, позволяют формировать ШИМ-сигнал с расширенным диапазоном преобразуемых управляющих сигналов при достаточно высокой частоте ШИМ. Модуль управляющего сигнала с выхода первого устройства 12 выделения модуля и сигнал номера такта с выхода счетчика 11 тактов, поступают на устройство 13 формирования кода управления на каждом такте, блок-схема алгоритма работы, которого приведена на фиг. 4. Вначале устройство 13 производит разделение кода modU на две части: старшую - ]modU[ и младшую modU=]modU[+modΔU. Из условия соответствия величины младшего разряда кода ]modU[ минимальному приращению ШИМ-сигнала. Затем устройство 13 по величине младшей части кода управляющего сигнала mod ΔU и по номеру такта n определяет величину прибавки ширины импульса Δτ на каждом такте ШИМ. Для реализации этого алгоритма в памяти микроконтроллера имеется таблица, из которой происходит выборка прибавки Δτ, которая может принимать значение 0 или 1 в зависимости от величины младшей части управляющего сигнала mod ΔU.
Первое логическое устройство 17 подключает кодовые комбинации, идущие с дешифратора 16 для управления инвертором на время, определенное преобразователем 3 «код-ШИМ» с учетом поправки в каждом такте. При этом достигается увеличение разрешающей способности преобразователя «код-ШИМ» и, как следствие, улучшение характеристик электропривода при работе на малых скоростях.
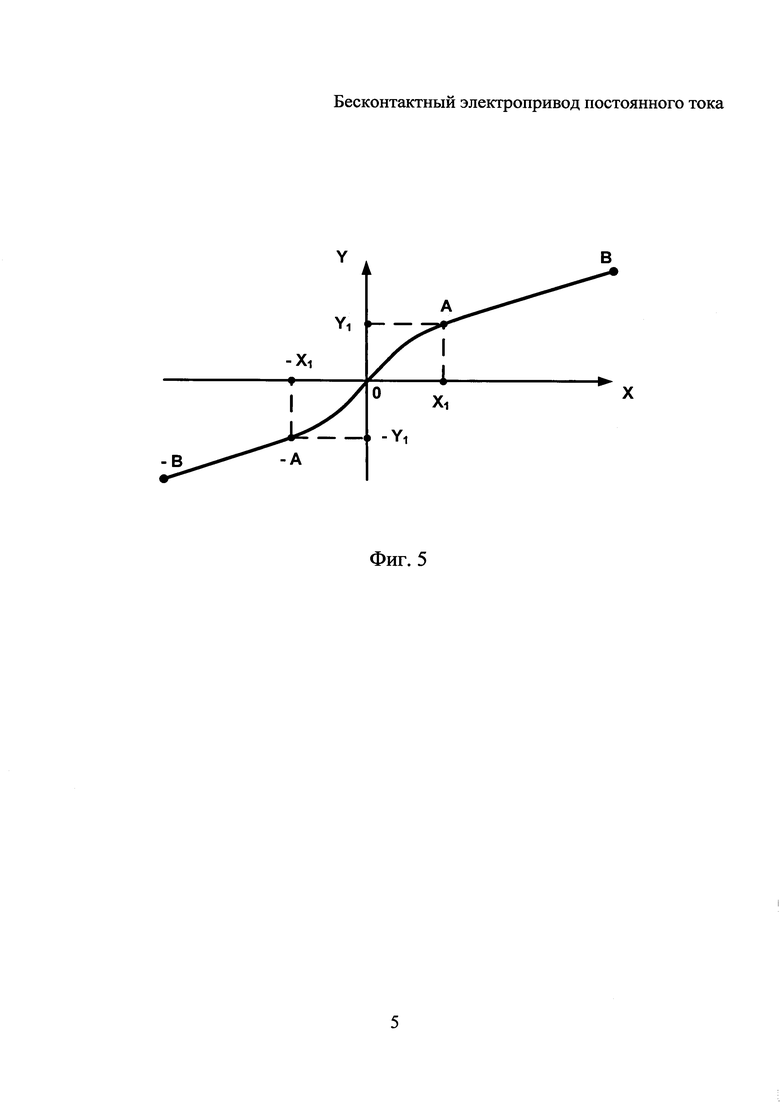
Функциональные элементы 19-25 и связи между ними формируют характеристику, изображенную на фиг. 5, которая состоит из линейного (АВ) и нелинейного (0A) участков.
Линейный участок характеристики (фиг. 5) формируется в результате прохождения сигнала с выхода устройства 8 определения ошибки по положению через последовательно соединенные релейный элемент 19 и второй сумматор 20, и подачи указанного сигнала на второй вход второго сумматора 20. Данный участок характеристики предназначен для работы электропривода при больших ошибках по угловому положению и может быть описан уравнением:

где:
x - сигнал на выходе устройства 8 определения ошибки по положению;
y - сигнал на первом входе устройства 9 определения рассогласования по скорости;
x1 - сигнал на выходе устройства 8 определения ошибки по положению, по которому происходит переключение с линейного на нелинейный участок характеристики;
k1, y0 - коэффициенты, определяющие параметры линейного участка АВ.
Нелинейный участок характеристики (фиг. 5) формируется в результате прохождения сигнала с выхода устройства 8 определения ошибки по положению через последовательно соединенные второе устройство 21 выделения модуля, устройство 22 умножения и третий сумматор 23 и подачи указанного сигнала на второй вход третьего сумматора 23 и второй вход устройства 22 умножения. Данный участок характеристики предназначен для работы электропривода при малых ошибках по угловому положению и может быть описан уравнением: 
где k2, k3 - коэффициенты, определяющие параметры нелинейного участка 0A.
Такое построение нелинейного участка позволяет создать характеристику с переменной крутизной и плавным переходом в линейный участок.
Переключение с линейного участка характеристики на нелинейный осуществляет второе логическое устройство 25. При больших ошибках по угловому положению (при больших сигналах на выходе третьего устройства 24 выделения модуля) второе логическое устройство 25 подключает к первому входу устройства 9 определения рассогласования по скорости сигнал с выхода второго сумматора 20. При малых ошибках по угловому положению (при малых сигналах на выходе третьего устройства 24 выделения модуля) второе логическое устройство 25 подключает к первому входу устройства 9 определения рассогласования по скорости сигнал с выхода третьего сумматора 23.
Когда электропривод работает на больших скоростях, под достаточной нагрузкой, импульсы ШИМ в ключах инвертора широкие, а за время паузы, в которой осуществляется динамическое торможение, ток не прерывается; при этом жесткость механических характеристик двигателя, управляемого ШИМ высокая. В этом случае рабочим участком является участок линейной характеристики АВ (фиг. 5), а коэффициент k1 (1) выбирается из условий получения желаемых характеристик электропривода, динамика которого аппроксимируется линейными уравнениями.
Когда электропривод работает на малых скоростях, при малых нагрузках, импульсы ШИМ в ключах инвертора узкие, а за время паузы, в которой осуществляется динамическое торможение, ток падает до нулевого значения, при этом жесткость механической характеристики электродвигателя не постоянна и уменьшается с уменьшением управляющего сигнала (при малых ошибках по угловому положению). При движении на малых скоростях в режиме прерывистых токов в случае использования настроек электропривода, принятых для режима непрерывных токов, вал электродвигателя значительно «проваливается» при воздействии момента нагрузки, а динамические характеристики ухудшаются. Поэтому для увеличения жесткости электропривода по углу при воздействии момента нагрузки и улучшения динамических характеристик при движении на малых скоростях введен участок нелинейной характеристики 0A (фиг. 5). Коэффициенты k2, k3 (2) выбираются из условий получения желаемых характеристик электропривода и сопряжения линейного и нелинейного участков.
Для малых ошибок характеристика (фиг. 5) имеет большую крутизну, с увеличением ошибки по углу крутизна характеристики плавно меняется, переходя в ее линейную часть. Это позволило получить более жесткую характеристику электропривода по углу при отработке малых скоростей и улучшить динамические характеристики для указанного режима.
Таким образом, совокупное введение функциональных элементов: релейного элемента 19, второго сумматора 20, второго устройства 21 выделения модуля, устройства 22 умножения, третьего сумматора 23, третьего устройства 24 выделения модуля и второго логического устройства 25 и связей между ними приводит к достижению технического эффекта, заключающегося в увеличении жесткости электропривода по углу при воздействии момента нагрузки (уменьшении ошибки по угловому положению вала) и улучшении динамических характеристик при движении на малых скоростях.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2006 |
|
RU2331963C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2007 |
|
RU2366069C1 |
| Цифровая следящая система | 1987 |
|
SU1797093A1 |
| СПОСОБ УПРАВЛЕНИЯ ТРЕХФАЗНЫМ ИНВЕРТОРОМ НАПРЯЖЕНИЯ С ШИМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2091979C1 |
| Электропривод постоянного тока | 1987 |
|
SU1515311A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| ЭЛЕКТРОПРИВОД АВТОНОМНОГО ОБЪЕКТА С ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2537957C2 |
| Устройство для управления шаговым электродвигателем с дроблением шага | 1987 |
|
SU1417162A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1700536A1 |
| ВЕНТИЛЬНО-ИНДУКТОРНЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ РЕЖИМОМ РАБОТЫ | 2013 |
|
RU2540319C2 |
Изобретение относится к области электротехники и может быть использовано в исполнительных системах различных механизмов на базе бесконтактных электродвигателей постоянного тока. Техническим результатом является увеличение жесткости по углу при воздействии момента нагрузки и улучшение динамических характеристик при движении на малых скоростях. В бесконтактный электропривод постоянного тока, содержащий электродвигатель, преобразователь «код-ШИМ», устройство формирования цифрового сигнала скорости, устройство формирования направления вращения, датчик положения, преобразователь сигнала обратной связи по положению в код, устройство определения ошибки по положению, устройство определения рассогласования по скорости, первый сумматор, счетчик тактов, первое устройство выделения модуля и устройство формирования кода управления на каждом такте, а также коммутатор, включающий в себя устройство деления на постоянный коэффициент, устройство определения номера зоны коммутации на каждом такте, дешифратор, первое логическое устройство и инвертор, дополнительно введены релейный элемент, второй сумматор, второе устройство выделения модуля, устройство умножения, третий сумматор, третье устройство выделения модуля и второе логическое устройство. Технический результат достигается благодаря тому, что дополнительно введенные элементы формируют характеристику с переменной крутизной для малых и линейным участком для больших ошибок по положению. 5 ил.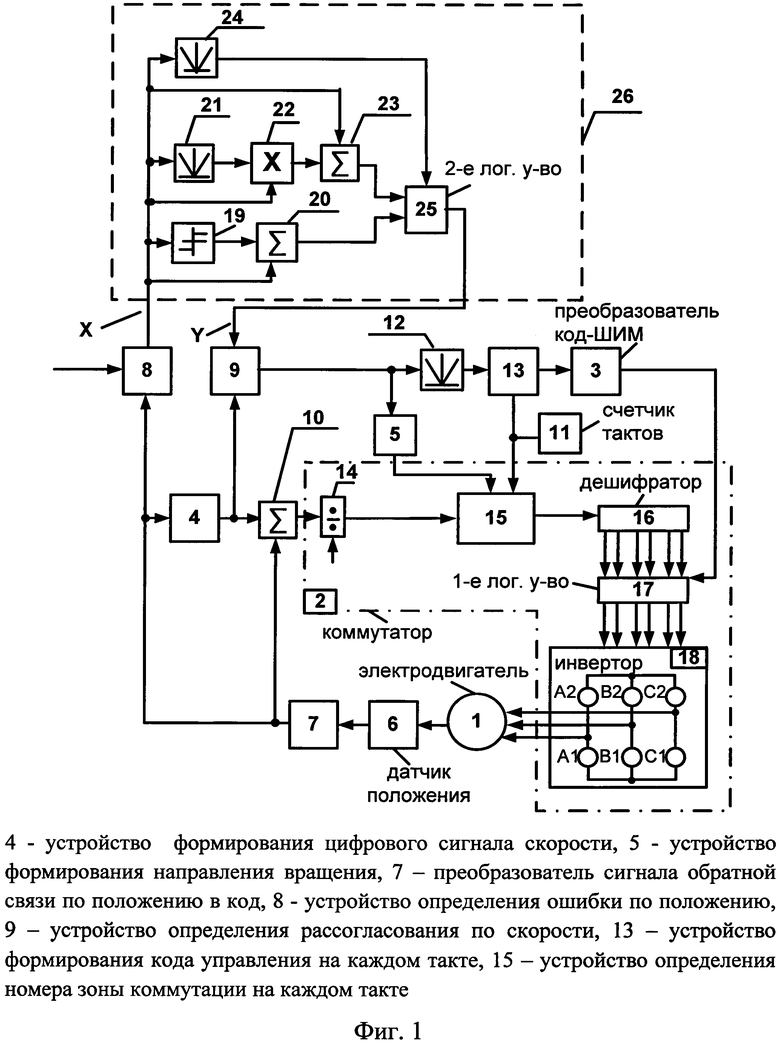
Бесконтактный электропривод постоянного тока, содержащий электродвигатель, коммутатор, преобразователь «код-ШИМ», устройство формирования цифрового сигнала скорости, устройство формирования направления вращения, датчик положения, преобразователь сигнала обратной связи по положению в код, устройство определения ошибки по положению, устройство определения рассогласования по скорости, первый сумматор, счетчик тактов, последовательно соединенные первое устройство выделения модуля и устройство формирования кода управления на каждом такте, причем первый вход устройства определения ошибки по положению служит для подключения внешнего устройства задания входного кода, второй вход устройства определения ошибки по положению подключен к выходу преобразователя сигнала обратной связи по положению в код, выход устройства формирования цифрового сигнала скорости подключен ко второму входу устройства определения рассогласования по скорости, датчик положения установлен на валу электродвигателя, выход датчика положения подключен к входу преобразователя сигнала обратной связи по положению в код, выход которого подключен к первому входу первого сумматора и входу устройства формирования цифрового сигнала скорости, выход которого подключен к второму входу первого сумматора, выход устройства определения рассогласования по скорости подключен к входам первого устройства выделения модуля и устройства формирования направления вращения, выход счетчика тактов подключен ко второму входу устройства формирования кода управления на каждом такте, выход которого подключен к входу преобразователя «код-ШИМ», коммутатор содержит последовательно соединенные устройство деления на постоянный коэффициент, устройство определения номера зоны коммутации на каждом такте, дешифратор, первое логическое устройство и инвертор, выходы которого подключены к фазным обмоткам электродвигателя, причем выход первого сумматора подключен к входу устройства деления на постоянный коэффициент, выход устройства формирования направления вращения подключен ко второму входу устройства определения номера зоны коммутации на каждом такте, выход счетчика тактов подключен к третьему входу устройства определения номера зоны коммутации на каждом такте, а выход преобразователя «код-ШИМ» подключен к входу управления первого логического устройства, которое подключает сигналы управления к ключам инвертора на время действия импульса ШИМ и переводит инвертор в режим динамического торможения на время паузы, отличающийся тем, что в него дополнительно введены последовательно соединенные релейный элемент и второй сумматор, последовательно соединенные второе устройство выделения модуля, устройство умножения и третий сумматор, последовательно соединенные третье устройство выделения модуля и второе логическое устройство, выход устройства определения ошибки по положению соединен со входами релейного элемента, второго и третьего устройств выделения модулей, со вторыми входами второго и третьего сумматоров и вторым входом устройства умножения, выходы второго и третьего сумматоров соединены соответственно с первым и вторым входами второго логического устройства, которое подключает сигналы с выходов второго или третьего сумматоров к первому входу устройства определения рассогласования по скорости, соответственно, при больших и малых сигналах на выходе третьего устройства выделения модуля.
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2006 |
|
RU2331963C1 |
| ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2007 |
|
RU2366069C1 |
| ЦИФРОВАЯ СИСТЕМА УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ | 1996 |
|
RU2098917C1 |
| Вентильный электропривод | 1991 |
|
SU1829101A1 |
| СПОСОБ ЛЕЧЕНИЯ ШОКОВОГО СОСТОЯНИЯ У НОВОРОЖДЕННЫХ С ХИРУРГИЧЕСКОЙ ПАТОЛОГИЕЙ | 2010 |
|
RU2491088C2 |
| JP 2005312292 A, 04.11.2005 | |||
| US 9083273 B2, 14.07.2015 | |||
| Электрогидравлический усилитель | 1978 |
|
SU748038A1 |
| WO 2011128687 A2, 20.10.2011. | |||

